模糊PID控制在MTS控制系统中的应用
2019-12-16周挺桑炜
周挺 桑炜
摘要:针对模糊PID控制在面对大迟滞、强非线性对象时的控制优越性,借助MATLAB模糊控制工具箱,设计了模糊PID控制器,并在Simulink下与传统PID控制进行仿真对比;使用MTS控制系统的虚拟通道和计算回路功能,结合MATLAB生成的离线模糊查询袁,将模糊PlD控制应用于MTS控制系统,扩展了系统的控制算法,为飞机结构强度地面试验的试验控制提供更多的解决方案。
关键词:模糊控制;MATLAB仿真;离线模糊查询表;MTS控制系统;计算机控制
中图分类号:TP273.4 文献标识码:A
文章编号:1009-3044(2019)29-0263-04
1概述
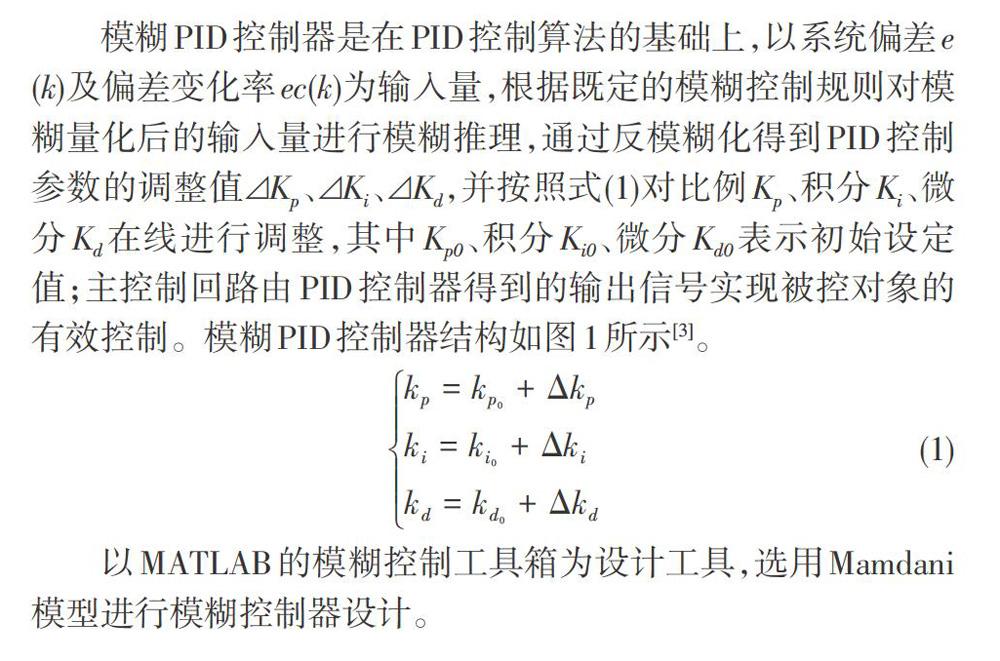
模糊控制是智能控制理論的一个重要分支,自20世纪中叶建立至今,其理论研究已比较成熟。随着计算机的普及,模糊控制广泛应用于自动控制领域。模糊PID控制结合了模糊控制和PID控制的优点,通过模糊控制规则实时调整PID控制器的比例、积分、微分参数,优化系统控制性能,具有结构简单、强鲁棒性和动态控制品质较好的优点,在被控对象表现为大迟滞、强非线性时,控制效果尤为突出。MTS控制系统是飞机结构强度地面试验中常用控制设备,其具备的虚拟通道和计算回蹦Calculation in the loop)功能提供了反馈信号和控制输出的编辑接口,用户可屏蔽系统固有的PID控制器,自行编程实现特定的控制算法。本文借助MATLAB的模糊控制工具箱(FuzzyLogic Toolbox)设计了模糊PID控制器,对其进行仿真验证并生成离线模糊控制查询表;在MTS控制系统中通过通道配置、变量定义和算法编辑,实现模糊PID控制在MTS控制系统中的应用。
2模糊PID控制器设计
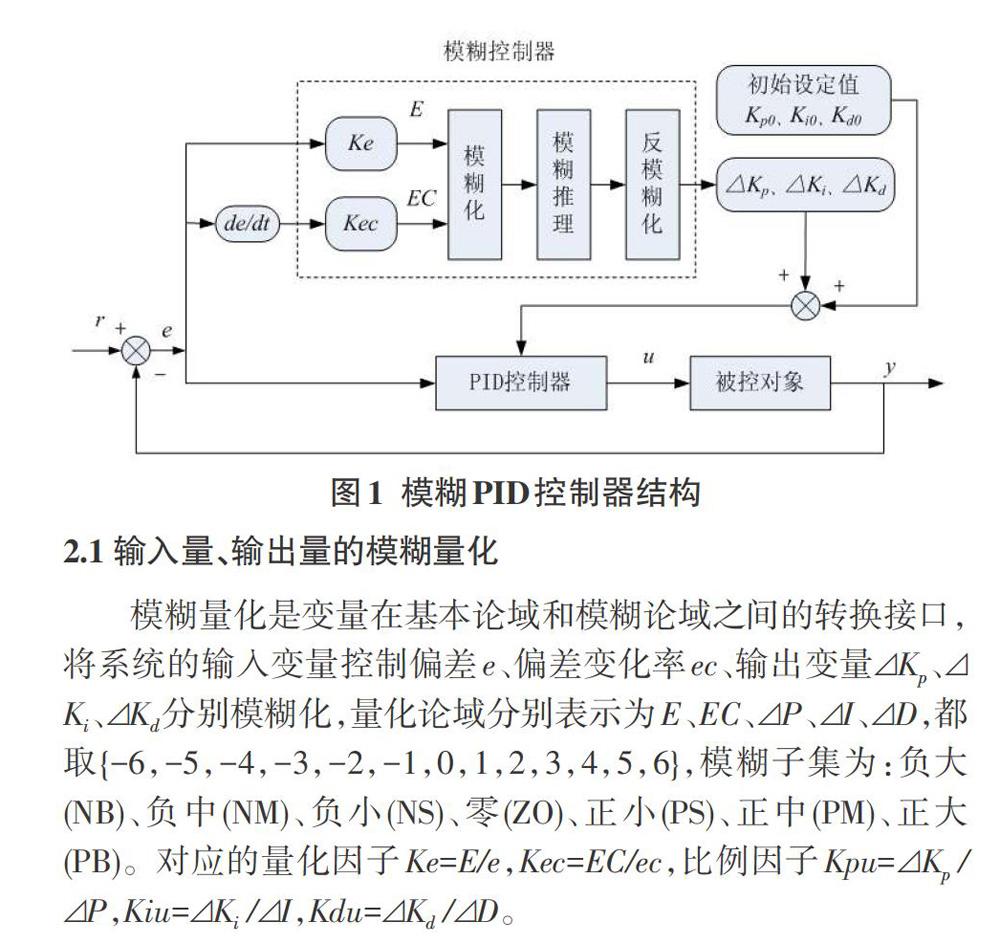
2.2设计模糊控制的隶属度函数
隶属度函数是用来描述论域中元素对模糊子集的隶属程度,隶属函数的选取决定着控制性能的稳定和灵敏度。模糊子集所取论域范围较大时,控制灵敏度较低,控制相对平缓,所取论域范围较小时,控制灵敏度较高。本文采用三角分布隶属度函数,所有输入和输出变量取值相同,其隶属度赋值表如表1所示。
2.3建立模糊控制规则
根据专家工程经验,归纳总结模糊控制规则,建立模糊控制规则表,其基本思路为:
a)当误差e较大时,取较大的Kp值和较小的Kd值,提高响应速度,使系统获得较好的跟踪性能,并避免微分饱和;取较小的K值,防止系统出现较大超调;
b)当e和ec为中等大小时,取较小的Kp值,使系统具有较小的超调并保证一定的响应速度;取适中的K值和Kd值;
a)当e较小时,取较大的K值和K值,减小系统静差,提高控制精度;并且,当ec较小时,取较大的Kd值,当ec较大时,取较小的%值,以增强系统的抗干扰性,改善系统动态特性;
2.4模糊推理和反模糊化
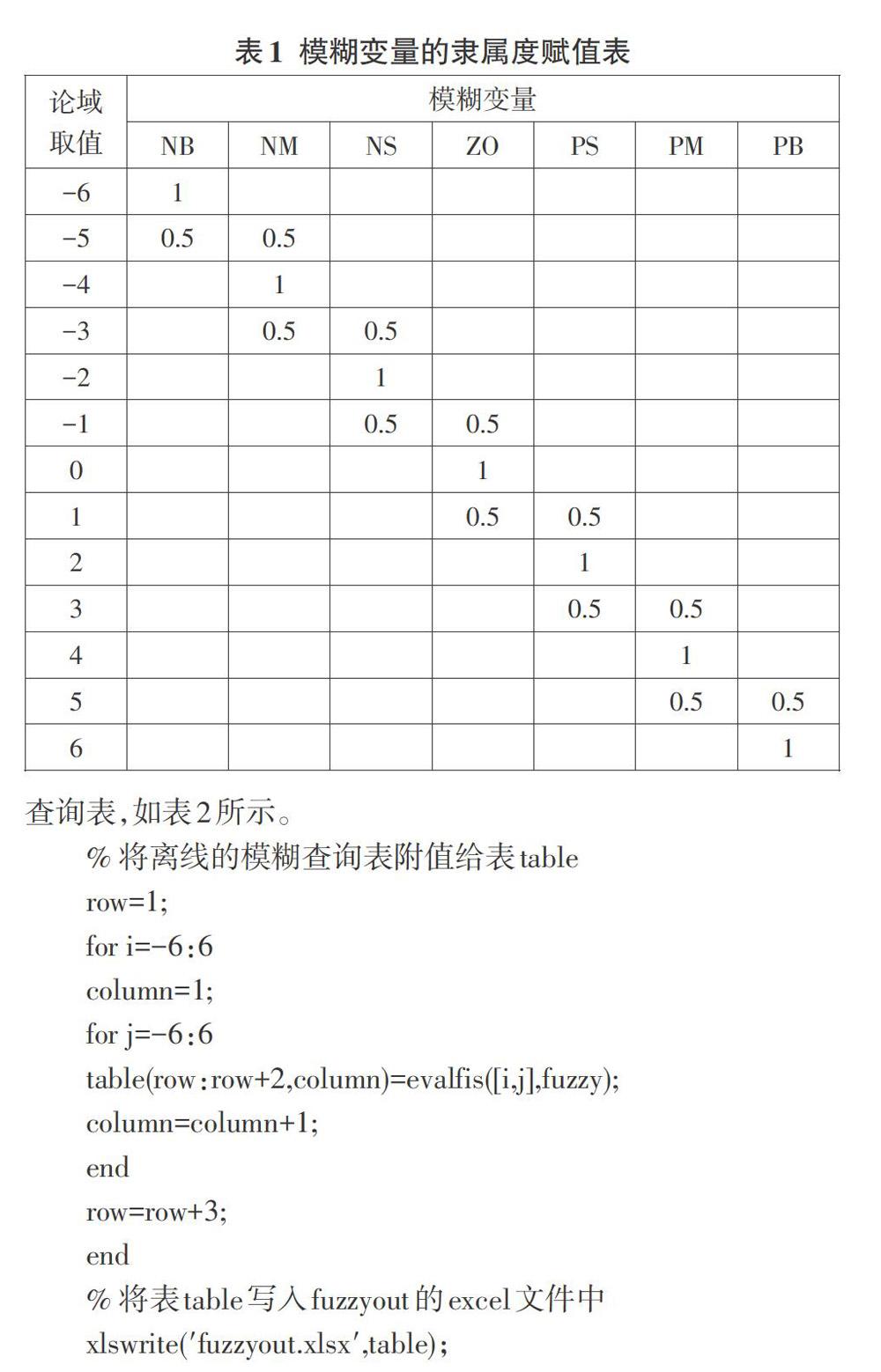
选用Mamdani模糊逻辑推理法和“max-min”法则进行模糊关系的合成运算,反模糊化方法采用面积中心法(centroid),设计生成名为“fuzzy”的模糊控制器,并通过下述M程序生成离线模糊查询表,如表2所示。
3系统仿真
在Simulink下搭建设计的模糊控制器,并以一典型自衡
4模糊PID控制器的实现
MTS控制系统具备常规PID控制器,配置传感器反馈信号至系统输入通道、执行机构驱动信号至系统输出通道,实现参数在线整定的PID控制;还提供了虚拟通道及计算回路功能,用户可绕开系统固有常规PID控制,以虚拟输入输出通道为中间变量对实际输入输出信号进行编辑以及通道控制模式的切换,实现先进的控制算法。对于模糊PID控制器,按下述步骤在MTS控制系统中实施。
4.1通道配置
图4为系统通道配置界面,包括1个标准控制通道(Stan-dard Type)、1个设定值控制通道(set Point Only Type)、4个计算输出通道(Calculated Output Type),其具体输入输出配置及功能描述如表4所示。
4.2变量定义
配置8个全局变量,分别定义为PID控制的初始设定设定
由式(1)和式(3)编写主回路PID数字控制程序,使标准控制通道的虚拟输A5~7分别计算P、I、D控制输出,令计算输出4通道对整个控制输出进行整合和管理,实现主体控制算法,其程序不再赘述。其中积分算法进行限幅控制,微分算法去除指令值影响。
5结论
a)模糊PID控制较传统PID控制克服了控制参数在线手动调整带来的局限性,系统具有更快的响应速度和更小的超调量,且不损失稳态精度,提升了系统的控制特性;
b)采用离线设计模糊查询表的方法,可将模糊PID控制部署于MTS控制系统中,在进行不同工况的飞机结构强度地面试验时,工程人员可完成更精确和有效的控制。正文内容。
