实验室消防机器人
2019-12-16王邦洲赵凯文胡彬苏典发陈蕾
王邦洲 赵凯文 胡彬 苏典发 陈蕾


摘要:近些年来,社会各界与教育部高度重视实验室安全。众所周知,高校实验室向来被认为是校园中的危险区域,尤其是生化类实验室,往往与炸药库、生化武器库、毒药间等相提并论,如在使用中稍有疏忽,便会造成生命与财产的重大损失。如何提高和完善实验室的安全水平,使实验室发挥其最大作用为教育教学服务,是当前实验室安全管理中面临的严峻显示问题,必须引起高度重视。本项目应用机器人来尽可能地降低实验室安全事故的发生率。我们设计的实验室机器人采用火光、稀有气体、有毒气体等多种传感器对实验室环境进行准确的检测,并在相应的危险时刻做出相应的应急反应。尽可能地降低事故造成的人员与经济损失。
关键词:实验室;机器人;安全Arduino;传感器
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2019)29-0201-03
1概述
2004年3月2日,学生进行过夜实验时,其使用的油浴突然起火,幸被巡逻值日及时发现并未造成损失。在进行长时间的加热、油浴等实验时,很容易因实验者疏忽造成实验安全事故,该机器人可以在无人值守实验室实时监测实验室安全。
2008年,某高校食品学院大楼楼顶临时实验室突然起火,着火面积达150平方米,经消防员调查为实验室酒精使用不当。实验室火灾发生初期如得到及时的扑救会很大程度的降低实验室财产损失,该机器人采用火焰传感器、烟雾传感器准确有效的24小时不间断的检测实验室安全情况,可以在火灾初期发出警报而后做出相应的补救。
2015年,清华大学一实验室发生火灾事故,导致一名实验人员当场死亡。事故原因为在实验过程中氢气泄漏而未发现,在高温实验时引发氢气爆炸。实验室安全关系广大师生的人身安全与实验室的财产安全,不容马虎。该机器人采用可燃气体传感器,实时监测实验室的可燃气体浓度,并在浓度达到危险浓度时发出警报,提醒实验人员采取相应措施,能有效地降低实验室因可燃气体泄露造成的损失。
2系统方案
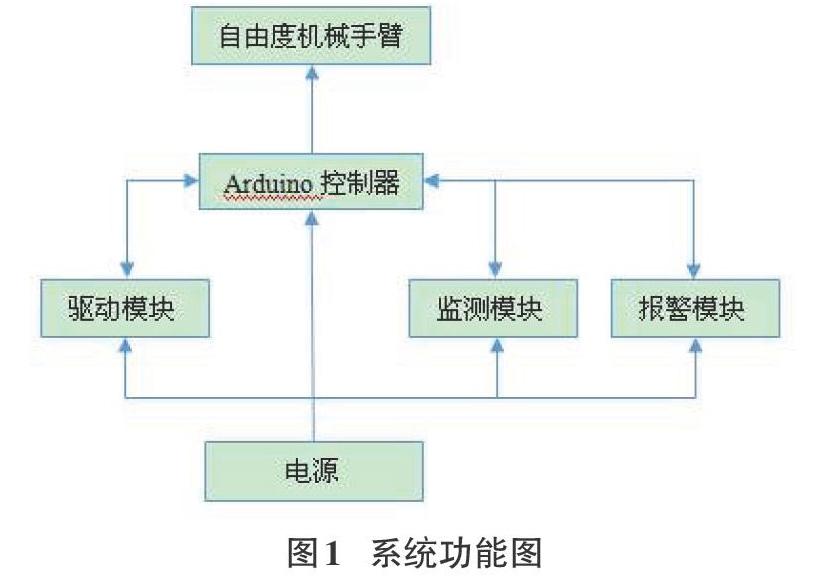
实验室消防机器人由电源模块、驱动模块、监测模块、控制模块、报警模块和自由度机械手臂组成。驱动模块采用履带式小坦克驱动,左右履带各使用一个直流电机,可以实现自由转向功能。监测模块是由火光传感器、烟雾传感器、温度传感器、超声波传感器等构成,用来准确的监测实验室环境。控制模块采用多块Arduino控制器,用于数据处理,蜂鸣器、发光二极管组成报警模块,当实验室温湿度、氧气含量、可燃气体浓度等超过预定值时发出警报。自由度机械手臂由多个数字舵机构成,在檢测到火源时可以精准得对准火源根部利用二氧化碳干粉灭火器进行扑救。实验室消防机器人系统主要包括6个模块:Arduino控制器模块、电源模块、驱动模块、监测模块、报警模块和机械手臂。系统功能如图1所示。
3功能与指标
3.1Arduino控制器模块
Arduino具有Processing/Wiring开发环境。Arduino包含硬件部分和软件部分。一是做电路连接的电路板;二是IDE程序开发环境。在软件部分Arduino IED中编写程序代码,上传到电路板后,Arduino主控板就会根据程序发出指令。
本系统所采用的主控板是Arduino UNO R3开发板,主控板主要负责接收和处理监测模块输出的信号,在接收到信号后控制驱动模块、自由度机械手臂和报警模块的运转,完成相应的工作,实现相应的功能。
3.2监测模块
监测模块使用火焰传感器、温湿度传感器、可燃气体传感器、二氧化碳传感器、氧气浓度传感器等多种传感器,用于实时监测实验室环境。当实验室发生火灾时,火焰传感器监测到火光值并向控制模块发出信号,控制模块控制驱动模块和机械手臂进行扑救。温湿度传感器实时采集实验室温湿度数据,并且在显示屏幕上显示当前温湿度的大小。氧气浓度传感器测量实验室内的氧气浓度并在显示屏幕上显示当前氧气浓度值,当实验室氧气浓度发生剧烈变化时控制报警模块发出警报。可燃气体浓度达到设定的危险浓度时,可燃气体传感器发出危险警告。二氧化碳传感器用于监测实验室内二氧化碳含量,并在显示屏上显示当前二氧化碳浓度值。
3.2.1烟雾与可燃气体检测
本系统采用的是MQ-2传感器来完成,MQ-2传感器集成了烟雾,液化气、苯、烷、酒精、氢气等的探测,是一种多气体探测器,它的优点有,反应速度快、稳定性强、使用寿命长、电路简单。
1)气敏元件
MQ-2传感器中敏感元件属于二氧化锡半导体气敏材料。在一定温度下,当有烟雾接触的时候,半导体表面导电率会有变化,而且烟雾浓度越高,导电率会越高,从传感器输出的电阻就会越低,最终输出的模拟信号越大。
相同的环境下,不同的气体会使得传感器输出不同的电压,以此也可以判断是哪种气体泄漏,或者有火灾的前兆出现。下图是温度在20℃,相对湿度65%,氧气浓度为21%,MQ-2传感器在不同气体下的电阻值与在纯净空气下电阻值之比Rs/Rn的变化曲线。
由于该气敏电阻使用需要一定的温度,才能得到更加准确的测量值,所以在封装传感器的时候会在其中加入一个电阻丝,让传感器维持一定的温度。下图是MQ-2的电路原理图
2)MQ-2I作原理
从QM-N10的4脚输出的是随环境变化的直流信号,加到u1A的引脚2上,Rp是一个灵敏度调节旋钮,在电路中输出限定电压。当检测气体浓度比较高,使得比较器2脚的电压高于门槛电压,比较器输出低电平(OV),此时LED灯亮,可以起到警示作用;当检测气体浓度相对较低时,比较器输出高电平,LED灯处于不亮状态。使用中可以根据实验实际情况调节Rp的大小,以实现对灵敏度的调节。MQ-2的输出有两个,一个是数字信号DOUT,输出检测到的气体是否达到设定警报值;另一个是AOUT,输出电压的模拟信号。
从AOUT口输出的模拟信号可以经过一个A/D转换器,将其转换为数字信号,Arduino接收到该数据,便可以利用程序进行运算,转化为可见的数字量,显示在屏幕上。因为输出电压比较稳定,所以实验中不需要加入采样保持器。
3.2.2火光检测
该系统使用的火焰传感器是基于远红外探测的,可以探测火光或一些波长在一定范围内的热源。它的探测角度能达到六十度,红外光的波长在880nm附近时,传感器的灵敏度可以达到最大值,在实际使用中比较实用。
1)火焰传感器工作原理
通过远红外传感器将外界红外光的强弱转化为模拟电信号,通过电路,便能将该模拟电信号转化为可用的数字信号,外界红外光越强,得到的数字信号值就会越大。下图是火焰传感器的电路原理图。
左侧LED(D1)是电源指示灯,起到提示作用。传感器具体工作是这样的过程,传感器输出模拟电压信号,加到比较器的2脚,RVl是灵敏度调节旋钮,可以设置门槛电压,通过比较器的3脚输入,红外传感器输出的电压是变化的,当该电压高于门槛电压,比较器输出低电平(OV),D2指示灯亮起,表示有火光存在。
由于着火一般都是先产生烟雾,或有可燃性气体泄漏,然后才可能會燃气明火。当Arduino收到火焰传感器传过来的电信号后,已经有警报响起,这时候要做的就是寻找火源,然后通知控制模块,驱动小车到达火源位置,进行灭火。
3.3电机驱动模块
驱动模块由双履带底座、直流电机和超声波传感器组成。
L293D扩展驱动模块:
电机驱动板L293D是双桥驱动芯片,可以驱动一路步进电机或者驱动两路直流电机,输出电流最高可达1.2A,且内部自带ESD保护,可防止静电放电电流对电路损坏和对电路的干扰,具有较强的稳定性。
3.4报警模块
报警模块由蜂鸣器和二极管组成,测量数据超过设定的安全值时蜂鸣器发出警报,信号到达发光二极管二极管被点亮。起到警示作用。
3.5机械手臂模块
3.5.1舵机控制板
51舵机控制板为6路PWM舵机控制器,采用lAP15W4K61S4芯片,供电电压为6-8.4V。
3.6电源模块
本系统的供电电源是由一块12V锂电池与一块9V电池组成,12V锂电池与电机驱动板连接给驱动电机供电,9V电池给控制模块与舵机驱动板供电。驱动模块、监测模块与报警模块用Arduino 5v电压输出口供电,供电结构图如图5所示。
4实验结果
在实验阶段,实验室消防机器人能相对准确的通过检测模块和显示模块实时显示实验室温湿度和危险气体浓度,在监测到火源时控制器控制驱动模块向火源移动,在火焰传感器检测到火源时控制器控制机械臂和灭火器进行灭火。
