液态透镜研究现状与发展分析
2019-12-13顾海鹏洪华杰范纪红
顾海鹏,洪华杰,范纪红
(1.国防科技大学 智能科学学院,湖南 长沙 410073;2.西安应用光学研究所,陕西 西安 710065)
引言
蜂群作战是未来无人作战的一种重要方式,小型无人机对微小型光电载荷的探测能力也提出了迫切的需求。当前受制于传统光学组件式镜头的体积,小型光电平台只能配备定焦镜头,制约了探测的距离和分辨率的提升。
液态透镜技术的出现弥补了传统光学系统在新领域应用上的诸多不足,其具有变焦响应快,变焦范围相对较大,制造成本低,结构简单,在体积与质量上更易小型化等特点。液态透镜可广泛应用于光电侦察、图像采集、手机镜头等领域,由于其在体积方面突出的优越性,已成为微纳领域一个重要的研究热点。液态透镜的研究至今已有近半个世纪的历史,期间各个领域的研究人员提出了许多不同的方案。为了指导液态透镜未来的研究方向,本文对前人的工作做了系统性的总结,对不同的技术路线以及各自的优缺点进行了对比分析,同时指出了当前研究中的不足,提出了未来可行的研究内容。
1 液态透镜的原理分析
液态透镜自从概念提出以来,出现过许多不同的方案,但总的来说,液态透镜根据其工作原理,可以分为两个方向:一种是利用电力直驱的液态透镜;另一种是利用机械力驱动实现变焦的液态透镜[1]。
1.1 “电润湿”透镜
法国科学家Lippmann在1898年实验中观察到了毛细下降现象(electrocapillarity),这是电润湿的最早定义。1981年,贝尔实验室对“电润湿”效应的动力学特性进行了分析研究,提出了“电润湿显示”的概念(EWOD),其原理如图1所示[2]。

图1 电润湿效应原理图Fig.1 Schematic diagram of electro-wetting effect
当小体积的液滴处于导体表面时,由于其表面张力,会收缩为一个凸起的近似半球,其与电极接触点上的切线方向与电极平面之间的夹角称为接触角,在图1(a)中表示为θ0。对液滴和导体之间施加电压后,液滴的接触角会减小为θv,如图1(b)所示,这种现象就称为“电润湿”效应。由于液滴与电极直接接触会导致液体的电解,Berge通过研究提出了在液滴和电极之间加入疏水性的电介质层,这不仅可以抑制电解反应,还能增加未通电下的接触角[3]。针对电润湿效应,英国物理学家Thomas-Young于1805年提出了著名的杨氏方程,量化地描述了接触角与电压之间的关系:
(1)
式中:θv为施加电压后的接触角;θ0为没有施加电压的初始接触角;ε为介电层的介电常数;ε0为真空介电常数;γLG为液体与接触环境的界面张力;d是介质层厚度;V是施加在电极与液滴之间的电压。从杨氏方程可以看出,当施加在电极与液滴之间的电压V变化时,接触角会发生改变,从而改变液滴的曲率。实际使用中,为了消除不同位姿下的重力影响,经常使用盐水、甘油这两种密度相近、互不相溶的液体,利用液-液接触面形成折射表面。
利用“电润湿”效应作为原理的液态透镜具有以下2点优势。
1) 由于利用该原理的透镜没有机械结构,因此体积可以控制在很小的范围内,且设备的损耗较小。
2) 透镜的凸面或凹面是由液-液交界面形成的,因此能自发形成表面质量很高的透镜。
虽然其优势相较于传统透镜很突出,但是目前的研究中仍然发现了许多不足。
1) 驱动电压较高。目前利用“电润湿”效应的液态透镜驱动电压一般在40 V以上,在有效变焦范围内,电压往往会达到70 V,这就需要一个较大的电源来驱动透镜,一定程度上抵消了透镜本身小体积所带来的优势,限制了其在实际中的应用。
2) 其面形被杨氏方程所描述,当电压确定后面形就随之确定,形成一个球面。目前的研究中只能对其接触角范围进行设计,设计的自由度较小,实际应用中需要配合一系列固态透镜或液态透镜,增大了体积。
3) 存在包括球差、畸变、色差等像差。液态透镜由于其填充的液态对不同波长的光线折射率不同,最终形成的图像会存在色差。其次,由于“电润湿”效应形成的曲面本质上是一个球面,其在成像的过程中会存在球差,图像边缘会出现畸变,当前CCD的像素较高,成像清晰,光学系统的成像缺陷将被明显地显示在图像上。为了对这些像差进行校正,则需要加入一系列透镜组矫正,或使用计算机后处理,一定程度上限制了液态透镜在微小型光电探测领域的应用。
1.2 机械液压式透镜
这种技术通常会利用可伸缩的弹性薄膜将液态封装限制在一个密闭的微型腔内,如图2所示。弹性薄膜的曲率半径可以通过施加外部压力来改变,液态受压充入或抽出液态腔时,其形状与曲率发生变化,形成凸透镜或凹透镜,由此来实现液态透镜的变焦。

图2 液压薄膜液态透镜结构图Fig.2 Structure diagram of hydraulic membrane liquid lens
图2中1是环形的密封环,2是用来控制液态进入或流出的橡胶膜,3是玻璃基板,4是高透光的弹性薄膜,5是外部储液腔,6是液体进出的通道。透镜的工作过程如图2(b)所示,橡胶膜受到外部压力弯曲后,挤压储液腔中的液体进入弹性薄膜封闭的内腔中,弹性薄膜受压鼓起,形成凸透镜[4]。
相比于“电润湿”液态透镜,基于液压驱动的液态透镜具有以下2点优势。
1) 在体积相近的情况下,液压驱动的液态透镜通常具有更短的响应时间,系统迟滞不明显。
2) 液压驱动的液态透镜驱动方式多样化,可以使用手动、音圈电机、蜗轮蜗杆等多种驱动方式,驱动电压依据驱动方式的不同也具有较多的可选择性。
但目前的液压驱动液态透镜也具有以下3点问题:
1) 薄膜的寿命和机械强度。液压驱动的液态透镜有一层弹性薄膜将两种不同的液态分开,该薄膜会随着液态不断往复运动,不断被拉伸或收缩。如果应用于焦距改变频率较高的场合,薄膜的寿命能否维持预期的时间是一个必须考虑的问题。此外,常用的PDMS薄膜长时间与液体接触还可能存在褶皱,收缩等问题。
2) 薄膜的粗糙度以及面形精度对成像质量的影响。由于当前弹性薄膜多使用PDMS薄膜,其成型工艺为固化工艺(将1∶10的固化剂与材料混合,静置一段时间即可成型),不同的生产条件下薄膜的质量差距较大,粗糙的表面会影响成像的清晰度以及透光率,不均匀的薄膜会造成面形误差,带来更多不可控的像差。
3) 目前液态透镜主要研究集中在微透镜、微透镜阵列领域,但“机械液压式”透镜在微型化的过程中存在很多微结构制造以及驱动上的难题需要解决。
1.3 介电力液态透镜
介电力现象与“电润湿”效应有相似之处,工作原理都是利用两种液体的交界面来形成折射面,以此减轻重力的影响,并且增加了系统的稳定性,其结构原理如图3所示。绿色与灰色分别代表两种不同的液体1与液体2,其中实线表示电压为0时的轮廓,虚线表示接入电压V1时变形后的轮廓。其区别在于介电力并不是通过在液体和电极板之间施加电压产生的,只需给电极通电就可产生介电力并完成变形,为了提高驱动效率,一般会将电极刻蚀为特殊形状。同时要产生介电力驱动,则要求作为主体的液体1介电常数较小,液体2介电常数较大[5]。

图3 介电力液态透镜结构示意图Fig.3 Structure diagram of mediate-electric liquid lens
由于“介电力”原理与“电润湿”效应高度相似性,其优势与缺点也基本相同。但在“介电力”透镜中,由于电极的形状对驱动电压的影响较大,因此一系列针对电极形状的优化研究大大降低了“介电力”效应的驱动电压,在有效变焦范围内,40 V左右的电压即可使透镜焦距产生较大幅度的变化。
1.4 液晶材料液态透镜
液晶材料是一种性质特殊的材料,其中应用最多的是向列相液晶,其分子的质心和普通液体一样在整个体系中是无序的,然而与一般液体不同的是,液晶处于各向异性的状态,这种状态是液晶分子所具有的圆棒状外形决定的。更确切地说,向列相液晶是圆柱对称的,即该体系中有一根轴线,平行于该轴方向,液晶各物理参数是一组数值,垂直于该轴方向,参数是另一组数值。当施加外界电场后,棒状液晶分子的指向会沿电场发生改变,进而改变该方向上的折射率等参数,其结构如图4所示。通过在特殊形状的ITO电极上施加电压,产生梯度变化的电场,进而使折射率发生梯度变化,更严格地说,是光轴方向发生了变化[6]。
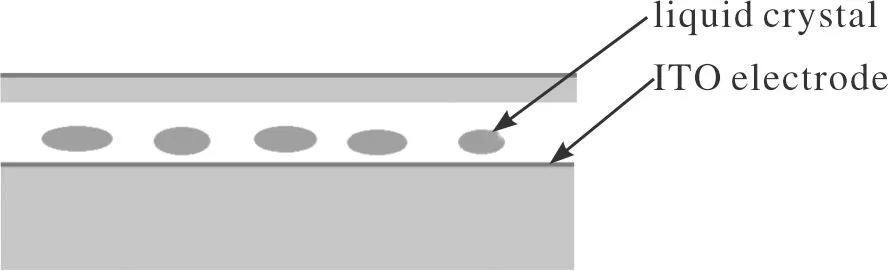
图4 液晶透镜结构原理Fig.4 Structure diagram of liquid crystal lens
使用液晶材料制作的液态透镜有着独特的优势。
1) 使用液晶材料制作的液态透镜体积很小,尺寸一般都处在微米量级,目前的研究成果中液晶层的厚度一般仅有几十微米。
2) 透镜的机械损耗和能耗都很低,液晶透镜由于其体积微小,所需的驱动电压也较小,通常都在40 V以内。
但是液晶材料的特性很大程度上限制了其适用范围,根据液晶材料的原理,通常要搭配偏振镜使用,这就大大降低了透过的光能。此外,液晶本身的原理使得光在透过液晶后还存在一次较大的损耗,因此使用液晶的液态透镜一般被用于显示领域,例如2D/3D显示等,这种特性也使得液晶材料的液态透镜很难应用于成像光学。
1.5 电、磁致伸缩聚合物液态透镜
近年来,电、磁致伸缩材料(人工肌肉)成为材料学科的研究热点,这类材料具有和生物肌肉类似的性质,在受到电、磁刺激时,会产生拉伸、收缩的现象,在电、磁刺激撤去后,又能恢复原状,此现象被称为介电弹性现象(dielectric elastomer,DE)。这种特殊的材料特性很适合用于驱动微小型结构,因此近几年也出现了一些利用电、磁致伸缩材料制备的液态透镜,其基本结构如图5所示。液体被包覆在两层DE薄膜之中,DE薄膜周边密封,并在薄膜外包覆电极,当两侧电极接入电压时,包覆着液体的部分会扭曲变形,曲率进而减小[7]。

图5 电、磁致伸缩材料液态透镜结构Fig.5 Structure diagram of liquid lens by electric and magnetic telescopic materials
电、磁致伸缩材料是当前最接近生物肌肉的一种材料,这种驱动方式大大简化了机械式液态透镜的结构设计,可以实现结构的微型化,目前研究中该透镜直径仅1.85 mm左右。
但作为刚刚起步的研究,这类材料存在的问题也较多。
1) 所需的驱动电压大。目前电、磁致伸缩材料所需的驱动电压都为kV量级,对微小型机电系统来说很难达到。
2) 响应时间较长。依据现有研究成果,驱动的响应时间一般在500 ms左右,恢复的响应时间在200 ms左右。
总的来说,这类液态透镜应用前景很大,但是针对这些问题还有很多研究工作需要展开。
2 液态透镜研究现状
国外对液态透镜的研究起步较早,最早可以追溯至18世纪的英国,天文学家Stephen Gray发现将液态滴入铜板上的小孔可以起到放大图像的作用,并以此原理制作了最早的液态显微镜[8]。之后随着解剖与生物医学的发展,研究人员发现人类的眼球之所以能够很容易地看清不同距离的物体,是因为肌肉改变了晶状体的曲率,以及晶状体到视网膜的距离,这显然比人类制造的往往由数个光学镜片组成的光学系统简单得多,这一来源于自然界的启示激发了光学研究者们很大的兴趣,自此开始了对液态透镜的研究[9]。
2.1 国外研究现状
2000年,法国的B.Berge在其“电润湿”效应的研究基础上,提出了使用两种互不相溶的液体利用“电润湿”效应形成液态透镜的模型,如图6(a)所示,其中1是绝缘的非极性液体,可使用溴萘、溴萘、硅油等,2是导电水溶液。两种液体具有相同的密度和不同的折射率,该设计消除了透镜在不同位姿下重力的影响。在液体与基板之间施加电压后,1所代表的液体形状就会发生变化。在实验中,为了简化模型,使用了如图6(b)所示的原型,中间的灰色部分是一块环氧树脂制造的透镜。该液态透镜的驱动电压较高,在电压达到90 V以上时,焦距才会产生明显的变化,而在200 V左右时,焦度才会达到100左右的屈光度,如此高的驱动电压,很大程度上限制了这个方案的实用性。此外,焦距对图6(b)中灰色的环氧树脂透镜的精度十分敏感,因此焦距与电压的准确关系也难以确定[10]。

图6 Berge透镜系统示意图Fig.6 Schematic diagram of Berge lens system
针对上述研究的不足,B.Berge在2005年改进了镜头的设计使得驱动电压降低至60 V左右,同时对结构做出了改进,如图6(c)所示。基电极上增加了一个锥形面,液滴与基板在锥形面上接触,这样不仅可以增加液滴的接触角,还可以增强透镜光轴的稳定性。依靠在液态透镜上的研究,B.Berge成立了法国Varioptic公司,专门从事液态透镜的设计与生产工作[11]。目前Varioptic公司已有数款液态透镜以及液态透镜组成的镜头产品问世,其中最小的透镜产品A-16F外径仅6.2 mm,总厚度1.8 mm,工作温度范围可达-30℃~85℃。2017年,B.Berge公布了一系列不同液体在不同电解质涂层表面的电润湿效应特性数据,为研究者提供了设计参考[12]。

图7 Philips透镜系统示意图Fig.7 Schematic diagram of Philips lens system
2004年,Philips公司与Varioptic公司使用了相同的技术,即“电润湿”效应,进行了液态透镜的研究。其结构原理如图7所示。图7(a)是未通电前的透镜状态,图7(b)是通电后的透镜状态。Philips公司研究的透镜与Varioptics的透镜在结构上十分类似,都是将两种互不相溶的液体封装在密闭腔体内,其不同点在于:Philips的产品使得液滴的末端可以在透镜的侧壁上延伸,通过这种方式尽可能地增加接触角的变化范围[13]。2007年,Philips在其液态透镜研究的基础上,使用2片液态透镜与3片塑料透镜组成了一个固-液组合镜头。该项研究中,Philips详细地说明和讨论了利用该种液态透镜制备镜头需要解决的问题。首先两种液体的折射率差值应当尽可能高,其计算表明放大系数为2时,折射率差应当大于0.2,同时这两种液体的粘度要适中,太低会引起震荡,太高则会使得系统响应迟滞。另外,由于大多数材料的折射率取决于通过光的波长,因此使用液态透镜就会使得所成像产生色差,提出利用选择特定阿贝数组合的液体以及额外的矫正透镜对像差进行消除,最终透镜的组合如图7(c)所示。但是实验的成像效果并不理想,成像质量受多个因素影响,导致成像在清晰度与色彩还原上均未达到商用的水平[14]。遗憾的是这项研究之后,Philips没有针对该技术发布更多的研究内容。
除了Varioptic以及Philips两家公司外,另一家瑞士的公司Optotune则基于液压机械结构技术进行了液态透镜的研究,其结构如图8所示。弹性薄膜15将上下两种液态分开,其中40可以沿图中标注的方向上下移动,移动时会挤压或拉伸15所示的弹性薄膜,弹性薄膜将腔体分为32和14两个储液腔,组成透镜的下部液体通过孔22与储液腔14相连,组成透镜上部的液体通过孔28与储液腔32相连,该设计可以保证40在移动时,透镜上下两部分液体的体积变化和为零。这里的上下两种液体与“电润湿”原理类似,为两种折射率不同但密度相同或接近的两种液体,以此消除重力的影响,但由于有薄膜的阻隔,并不要求两种液体互不相溶[15]。

图8 Optotune液态透镜结构图Fig.8 Structure diagram of Optotune liquid lens
此外,国外也有许多高校与科研机构进行了液态透镜的研究。目前对液态透镜研究最为广泛的是韩国全北国立大学(Chonbuk National University,Korea)任教的Hongwen Ren教授,Hongwen Ren教授主要研究方向为液晶显示,因此主要对液晶材料在液态透镜上的应用进行了研究。2006年,Hongwen Ren教授针对液晶液态透镜的诸多不足提出了一项改进方案,即使用玻璃壳体代替玻璃透镜,结构如图9所示。中间是普通的LC单元,在LC单元之上有一玻璃球壳,球壳内部涂敷有ITO电极,LC单元内的电极与球壳内的电极之间接入电压后,即可产生梯度分布的电场。先前的研究中,为了产生梯度分布的电场,一般在球形玻璃或聚合物的表面涂敷ITO电极,再将该层放置于液晶层上,相比之下,该研究可以在球壳内填充介电常数不同的物质,进而改变电场强度,优化透镜的光学与动力学性能[16]。

图9 应用玻璃球壳的液晶液态透镜结构Fig.9 Structure diagram of liquid crystal lens on applied glass spherical shell
2014年,Hongwen Ren基于液晶技术提出了一种多电极驱动的菲涅尔透镜,其结构如图10所示。其设计核心在于下基板的两块像素电极1和2,两块像素电极的形状均经过精心的设计,且通过一层钝化层连接在一起。通过在上基板的公共电极与像素电极1、2之间施加不同的电压,可精确控制不同位置液晶分子的指向,优化边缘效应,得到了性能优良的液晶菲涅尔透镜,使得菲涅尔透镜误差从35%下降到16.9%[17]。

图10 多极驱动液晶菲涅尔透镜结构Fig.10 Structure diagram of multipole-driven crystal Fresnel lens
2005年,Hongwen Ren和 Shin-Tson Wu研究了一种可以改变光圈大小的机械液压式透镜,其结构如图11(a)所示。薄膜腔的周围有类似于光圈的叶轮结构,叶轮可被驱动杆驱动,向中心收缩,挤压液体腔,使薄膜形成曲率近似为R的形状,如图11(b)所示。该透镜的通光孔径尺寸为12.5 mm,厚度为5 mm[18]。

图11 可变光圈薄膜透镜结构原理Fig.11 Structure diagram of variable aperture membrane lens
2007年,Hongwen Ren和Shin-Tson Wu对液态透镜开展了研究,首先使用两块透明玻璃板,分别钻2个5 mm小孔,再将孔分别用PDMS弹性薄膜和橡胶膜密封,如图12(a)和图12(b)所示。接下来将这两块玻璃叠放在一起后,周围用环氧树脂封装,中间填充纯水,如图12(c)所示。这里要注意的是橡胶膜在透镜外部,弹性薄膜在透镜内部,作为透镜的光学部分。进行变形时,对橡胶模施加压力即可,如图12(d)所示。实验中透镜的响应时间约为40 ms,已经达到较高的水平[19]。

图12 Hongwen Ren透镜结构与驱动原理示意图Fig.12 Hongwen Ren lens structure and drive schematic diagram
2017年,印度的Roshan Patra等人研究了一种无膜的机械液压式透镜,如图13所示。其具有与光轴垂直的上下2个透明窗口,顶部和底部腔体内填充折射率不同、互不相溶的两种液体,且对液体的导电性没有要求。填充时,液体交界面位于凸出部分的锐边上,底部有一个螺丝通入腔体内部,旋入或旋出螺丝就可改变腔体内的压力,以此改变液体交界面的曲率,其焦距为-500 mm~500 mm,响应时间约为50 ms[20]。

图13 无膜机械液态透镜结构示意图Fig.13 Structure diagram of machinery liquid lens without membrane
2003年,T.Krupenkin等人提出了一种四电极的液态透镜,在改变焦距的基础上,还能在二维平面上改变光轴的位置,其结构如图14所示。图14(a)是电极结构,其被分为4个电极,黑线是ITO刻蚀的部分,通过对4个部分施加V1~V4的不同电压,实现光轴的移动[21],在这项研究的基础上,韩国Jae Yong An和日本Atsushi Takei等人也进行了光轴控制的研究[22-23]。

图14 T.Krupenkin的四电极结构Fig.14 Structure diagram of four-electrode on T.Krupenkin
2008年,Hongwen Ren提出了一种基于介电力的液态透镜阵列,其结构如图15所示。为了形成微透镜阵列,将两种互不相溶的介电液封装在两层玻璃板之间,介电液1(L1)的介电常数较低,折射率较高,介电液2(L2)的介电常数较高,折射率较低,上下玻璃基板上涂敷有电极,下基板上的电极被刻蚀出圆孔阵列,极板间未接入电压时,介电液1散乱地分布在极板间,如图15(a)所示。当极板间接入电压时,介电液1向下极板上刻蚀出的圆孔阵列聚集,按照图15(b)~图15(c)的顺序形成透镜阵列,电压撤去后,介电液1又会逐渐沉积。该透镜阵列单个透镜的通光孔径为140 μm,驱动电压在60 V左右,透镜的响应时间较短,上升时间约30 ms,下降时间约250 ms[24]。

图15 Hongwen Ren介电力液态透镜Fig.15 Hongwen Ren mediate-electric liquid lens
2017年,韩国的Jeongmin Lee等研究了一款特别的液态透镜,它可以同时改变自身的焦距和光圈大小,结构如图16所示。

图16 可变焦距与光圈液态透镜结构示意图Fig.16 Structure diagram of zoomable and aperture liquid lens
其中lens body是内部为锥面的电极,middle plate为使用MEMS加工技术制备的ITO电极。原理上使用“电润湿”效应与介电力共同驱动,驱动电压为60 V时响应时间为80 ms,焦距在9.04 mm处饱和。光圈的变化利用ITO电极驱动周围的不透明液体实现,其光圈驱动结构孔径在0 V时为4.75 mm,200 V时为1.35 mm[25]。
2018年,韩国的Il Song Park等人将液压驱动与“电润湿”效应结合起来,研究了一种复合液态透镜的性能,其结构如图17所示。周围是被PDMS(聚二甲基硅氧烷)所封闭的驱动腔体,驱动腔体通过下部的小孔与中间的透镜腔连接。图中黄色部分是封装驱动腔的PDMS薄膜,其上固定有一块环形的钕磁铁。下方的电磁铁通电时,环形的铷磁体就会被吸下,将驱动腔内的液体压入透镜腔,抬升液面的高度,改变物距与像距,同时利用透镜腔内壁上的电润湿效应,改变液面的面形。实验中初始焦距为8.94 mm,电压从0 V~90 V改变时,焦距呈指数增长,直至透镜变为凹面。焦距在电压为130 V时,在-13.42 mm处饱和,液面高度每1 V变化为24 μm[26]。

图17 复合液态透镜结构示意图Fig.17 Structure diagram of compound liquid lens
根据上文文献的一些介绍分析可以看到,国外对液态透镜的研究主要集中在基于“电润湿”效应与介电力驱动方面,对液压驱动的液态透镜研究相对较少,但目前两种原理都有产品面世。研究路线从基本的“电润湿”效应出发,研究了如何增大接触角,如何改变透镜光轴,以及利用“电润湿”效应的特性设计了集成在透镜上的光圈。近年来,也有将液压驱动与“电润湿”效应结合使用的趋势。
2.2 国内研究现状
由于国外对液态透镜的原理研究已经较为成熟,国内的研究起步较晚,目前针对液态透镜展开研究的机构有清华大学、北京理工大学、四川大学、东南大学、南京邮电大学、上海理工大学、中国科学院长春光学精密机械与物理研究所等。
2008年,清华大学微电子研究所的康明等人研究了一种“悬环”结构的液态透镜,如图18所示。有一个圆环电极悬浮在液体中,液滴被钳制在环形电极内部,通过改变环形电极与底部透明电极间的电压,可以改变液体的与底部疏水层的接触角,使得液滴的表面在A、B两个状态之间变化,可以实现曲率变化和焦距调节。电压从0~40 V之间变化时,焦距可以在8.51 mm~55.9 mm之间变化,在电压45 V时接触角饱和,该设计有效减小了所需的驱动电压[27]。

图18 “悬环”结构液态透镜Fig.18 Hanging ring structure liquid lens
四川大学的Qionghua Wang教授对液态透镜的研究目前在国内来说较为丰富。2011年,Qionghua Wang与Lei Li教授研究了一种机械液压式薄膜液态透镜,其结构如图19所示。玻璃腔体被分隔为3个部分,左右两侧的腔体内填充液体1,中间的腔体填充液体2,与中间腔体连通的上部有一个可以挤压的活塞,活塞向下挤压时,中间腔体容积减小,液体通过挤压与两侧腔体相隔的薄膜促使薄膜变形,使中心一部分凸透镜聚焦有效区域;当活塞被拉起时,中间腔容积减小,两侧的液体挤压薄膜进入中间腔,使中间有效区域成为凹透镜。该透镜焦距可在-12.6 mm~12.5 mm之间变化,整体尺寸约为14 mm[28]。
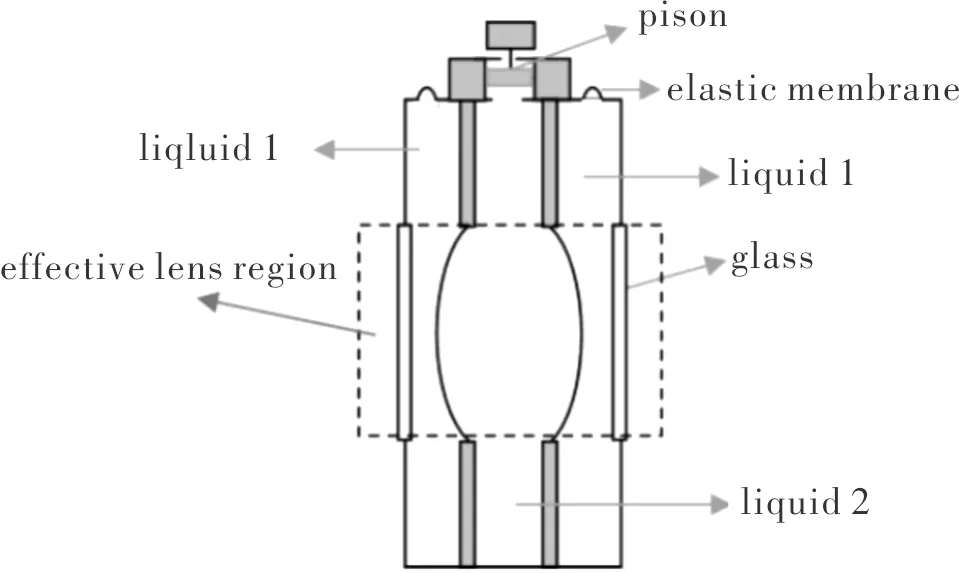
图19 带活塞机械液压式透镜结构原理Fig.19 Structure diagram of machineryhydraulic lens with piston
2015年,Qionghua Wang教授与韩国全北国立大学的Hongwen Ren合作研究了一种基于电润湿效应的折返式液态透镜,其结构原理如图20(a)所示。在一般的电润湿液态透镜结构的设计基础上加入了一个位于透镜前方的圆形反射膜和一个位于透镜后方的环形反射膜,整体结构接近于天文望远镜的设计,该透镜的光路如图20(b)所示。该设计通过多次折返提高了3倍的光功率,当电压在47 V~62 V的范围变化时,焦距可在21.1 mm~91.9 mm范围内变化[29]。

图20 折返式“电润湿”液态透镜原理结构图Fig.20 Structure diagram of foldback electro-wetting liquid lens
2019年,Qionghua Wang教授基于电润湿效应提出了一种非球面调谐的固-液复合液态透镜,在一般的“电润湿”液态透镜结构基础上,在通光孔径的后部基板上加入了一片非球面固态透镜,以此消除液体变形表面偏离球面所导致的像差,其结构如图21所示。图中黄色指示的部分即非球面液态透镜,该透镜有效通光孔径约为6 mm,当电压从30 V增加到75 V时,焦距从265 mm减小到20.5 mm[30]。

图21 “非球面调谐”固-液混合液态透镜Fig.21 Aspherical tuning solid-liquid hybrid liquid lens
此外,东南大学的夏军教授也在开展液态透镜的相关研究,2008年,夏军教授申请了一种基于电润湿效应的液态透镜专利[31];2009年,夏军教授对介电力驱动变形的液态透镜进行了仿真分析[32];2010年,夏军教授对氧化锌四足纳米晶粗化的介质表面上的电润湿效应进行了研究[33]。
上海理工大学的Runling Peng教授也展开了许多液态透镜的研究,2013年,Runling Peng教授对“电润湿”液态透镜的面形进行了计算,最后经过实验证明了相同密度的两种液体形成的交界面是一个球面[34]。
2014年,Runling Peng教授探索了“电润湿”液态透镜在医疗领域的应用,即能否用液态透镜代替人眼中损坏或老化的晶状体。主要研究了在液态透镜中加入两块非球面镜,来提高变焦范围与成像质量,经过仿真分析,变焦范围超过自然人眼,分辨率基本达到人眼极限[35]。
2017年,Runling Peng教授研究了液态透镜中填充的液体粘度对透镜响应滞后的影响,最后得出了降低油粘度、降低结构表面粗糙度都可以提高响应速度的结论[36]。
北京理工大学的研究以液态透镜的应用为主。2014年,北京大学的张晨光利用杨氏方程与Laplace方程解算了基于电润湿效应的液态透镜的面形精度,并研究了与液态透镜变焦范围相关的参数与焦距之间的关系[37-38]。2016年,北京理工大学的宋秀萍在张晨光的研究基础上,深入研究了液-固组合透镜的变焦范围,加入固体透镜后,未加电压时其焦距未达到无穷远,160 V电压下达到最小焦距9.03 cm,0~20 V内焦距变化速率最大[39]。
2015年,南京邮电大学的王评在基于“电润湿”效应的基础上,对液态透镜的像差进行了测量,并利用两片液态透镜设计了无机械移动的光学系统,其变倍比为2.5,焦距可以在20 mm和50 mm间切换。为了提高双透镜组的成像质量,他又设计了三液态透镜的成像系统,其焦距可以在3 mm~21 mm之间变化,变倍比达到7[2]。
中科院的研究有其独到之处。2013年,中科院长春精密机械与物理研究所的刘永明等人分析了液压机械结构驱动的薄膜液态透镜的面形,并对面形做出了优化设计。其优化原理如图22(a)所示,其中Ω为可变形的柔性结构。利用SIMP算法寻找Ω的最优质量分布,使得变形后的面形更接近球面,其仿真效果如图22(b)所示。最终仿真的优化效果在弦高为0.5 mm,透镜口径分别为初始100%、95%和90%时,PV值分别是初始结构的5.7%、11.9%和2.5%,RMS值分别是初始结构的11.2%、21.9%和45.4%,优化后的高级球差基本消失[40]。

图22 弹性薄膜面形优化柔性结构Fig.22 Structure diagram of elastic membrane surface shape
国内对液态透镜没有开展过多的基础研究,更多地集中在液态透镜的应用上,例如使用液态透镜组合镜头,实现变焦成像,以及设计一些特殊结构或加入透镜组,对液态透镜的像差进行校正。
2015年,四川大学的Qionghua Wang教授基于“电润湿”液态透镜设计了一套彩色全息变焦显示系统,系统结构如图23所示。该设计中使用液态透镜代替了传统的机械变焦系统,使得系统结构更加紧凑,可以快速改变重建图像的放大倍数[41]。
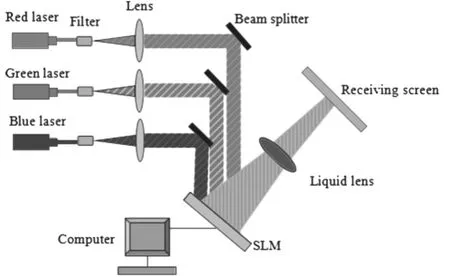
图23 液态透镜对焦彩色全息投影系统结构图Fig.23 Structure diagram of liquid lens focusing color holographic projection system
2016年,Qionghua Wang教授提出了微液态透镜阵列的集成显示器,该透镜阵列使得显示器可以在二维显示和三维显示之间切换。微透镜阵列的结构原理如图24(a)所示,平板整体被立柱分隔为数个微型腔,薄膜将平板整体分为上下2个部分,上下腔分别注入、抽出液体即可完成图24(b)的变形[42]。

图24 微透镜阵列结构原理Fig.24 Structure diagram of micro lens array
2018年,Hongwen Ren教授利用液态透镜和偏振镜实现了激光的紧密聚焦,实现了对光斑大小的精确控制,系统结构如图25所示。其中偏振转换器用于将激光转换为径向偏振光或线偏振光,液态透镜使用的是机械液压式驱动的液态透镜,在超分辨率成像、材料加工和微粒捕获等方面,可控制光斑大小,使径向偏振激光的紧密聚焦具有潜在的应用前景[43]。

图25 激光紧密聚焦系统Fig.25 Laser close focus system
从研究角度来说,液压驱动的液态透镜需要更多考虑结构设计,利用一些巧妙的结构,在小体积内实现透镜变形,这方面科研内容相对较少。基于“电润湿效应”的液态透镜的机械结构相对简单,从科研角度来说研究内容更丰富,实验更易操作。
3 技术分析与发展趋势
传统机械式变焦镜头依靠精密机构,驱使光路中部分光学器件相对运动来改变焦距,由于其镜片数量多、机构复杂,一般体积较大,光轴一致性精度不高、变焦响应速度慢。而由液态透镜构成的镜头从原理上改善了这一状况,可在较小体积内实现大范围变焦,且响应速度快。
由液态透镜组成的光学系统结构简单,加工成本低,可有效解决机械式变焦镜头的问题,势必会成为未来光电侦察中的重要发展领域。目前传统光学系统中,一种新的光学设计思路——自由光学曲面的设计,也已成为现代光学的一个重要研究方向,其在不增加光学元件数量的前提下增加了更多的设计自由度,可以有效减小光学系统设计残差和光学元件数量,改善系统成像性能,简化系统结构。自由曲面本质上是设计一类复杂的、非旋转对称的异形曲面,拥有更大自由度和非球面度[44]。然而自由光学曲面加工难度与成本相较于球面镜要高出很多,那么液态透镜作为一个柔性面,是否可以通过某种方式精确控制其面形以达到预期的变形?“电润湿”效应所制备的透镜根据其原理,本质上是一个球面,要控制面形从原理上来说难度较高,目前也未见有研究者提出相应的研究方法;而液压驱动的液态透镜其本质上是弹性薄膜在不同压力下的变形,大多数的研究者将液压驱动的液态透镜视为球面处理,或者认为液态透镜焦距一旦确定,就没有设计的自由度,这种看法从力学的角度来说是不完备的。2017年,捷克共和国的PETR POKORNY等人利用位移与格林-拉格朗日应变之间的精确关系,结合圣维南-基尔霍夫材料定律,推导出了液态透镜的精确面形,并且指出初始施加的预应力对变形性能几乎没有影响[45]。
此外,近几年的研究中也逐渐出现将多种原理与技术路线混合使用的思路,例如固-液混合透镜,“电润湿”与机械液压混合透镜等。这些研究的目的都在于消除系统像差,提高成像质量,最大幅度地优化液态透镜的性能。
因此,如何对液态透镜的面形进行精确的控制,最大程度地消除系统的像差,简化成像系统结构,是液态透镜大量进入商用领域替代传统透镜需要解决的重要问题。
4 结束语
当前,液态透镜的研究已经取得了一些令人振奋的成果,显示出了许多超越传统透镜的性能,透镜不仅实现了调节焦距的功能,更出现了调节物、像距以及光圈等丰富的研究成果。
国内对液态透镜的研究尚处于起步阶段,与国外的高水平研究成果还存在一定的差距,但国内开展的应用性研究对液态透镜的设计也具有一定的指导意义。液态透镜从目前取得的成果来看,是未来光电侦察平台实现微小型化、高质量化、低成本化的关键技术之一,从科研角度来说亦具有很大的研究价值。液态透镜的原理是其实现功能的核心,我们认为未来的研究应当继续以攻克核心技术为主,在完成单个透镜功能的基础上,再进行透镜组合的研究,或者更进一步研究多液态透镜联合运动,最大限度地减小镜头的体积。目前,液态透镜在向性能稳定、优越的实用产品转化过程中还有很多的研究工作需要继续进行,期间亦会经过从液-固组合镜头向液-液组合镜头转换这样一个过渡阶段。
液态透镜的两种原理各有其优缺点,适用范围也不尽相同,研究者在选择研究方向时应当依据自身的需要选择合适的研究方向。总之,液态透镜是个很新颖的研究方向,新的设计层出不穷,未来必将一步步走向实际应用,逐渐替代传统透镜,在光电领域大放异彩。
