过饱和交叉口群信号优化研究
2019-12-10任义凡杨晓芳
任义凡 杨晓芳
摘要:为缓解过饱和交叉口群拥堵问题,克服单目标或线性组合优化得不到最优解的问题,建立了多目标优化模型,并应用改进的非支配遗传算法求解模型。在对过饱和状态进行识别的基础上,选取了交叉口群内总的交通量、平均车辆延误和平均排队占比作为优化目标,建立优化模型。将算法得到的优化结果和配时软件得到的配时方案分别在VIS-SIM仿真软件中运行。交叉口群仿真验证表明,按建立的多目标优化模型求解得到的方案与配时优化软件得到的方案对比,多目标优化方案通过交叉口群的总交通量增加了13%,车辆平均延误下降了11%,平均排队占比下降了14.8%,改善了过饱和交叉口群的运行状况。
关键词:城市交通;过饱和交叉口群;多目标优化;信号优化;NSGA-II算法
中图分类号:F570文献标识码:A
近年来,缓解交通拥堵的重点从扩大供应转向更好地利用现有交通基础设施资产和需求管理。由于与成本、可用的通行权以及环境和社会因素有关的问题,修建新道路或扩建现有设施通常是不切实际的。因此,工程师、规划师和开发人员正在寻找通过将需求随时间和空间扩展来优化现有设施使用的方法。交通信号优化被认为是最大限度地减少高峰时段区域性拥挤的一种选择。
交叉口群内的供需不平衡是造成过饱和的根本原因,而且交叉口处是间断交通流,往往过饱和就是从一个关键交叉口处引起的。由于供需不平衡,造成过饱和排队的形成,最终造成交叉口群的拥堵。从1960年起,国外的专家,就开始对孤立交叉口的过饱和状态展开研究,并逐渐发展为对交叉口群的研究,研究的重点也转为辨别和疏解过饱和状态交叉口群。随着ITS智能交通系统的不断进步,区域交通协调控制成为了各国学者研究的重点。李岩(2012)为提升过饱和状态下小区域交叉口群交通信号控制的效率提出了一种基于NSGA-Ⅱ算法的信号配时优化方法四。赵盼明(2018)利用模糊控制技术,对小区域过饱和交叉口群进行信号协调优化。安思颖(2018)将微粒群算法应用于过饱和状态交叉口群信号协调优化当中,并通过VISSIM仿真评价验证了算法的有效性。
1过饱和状态识别
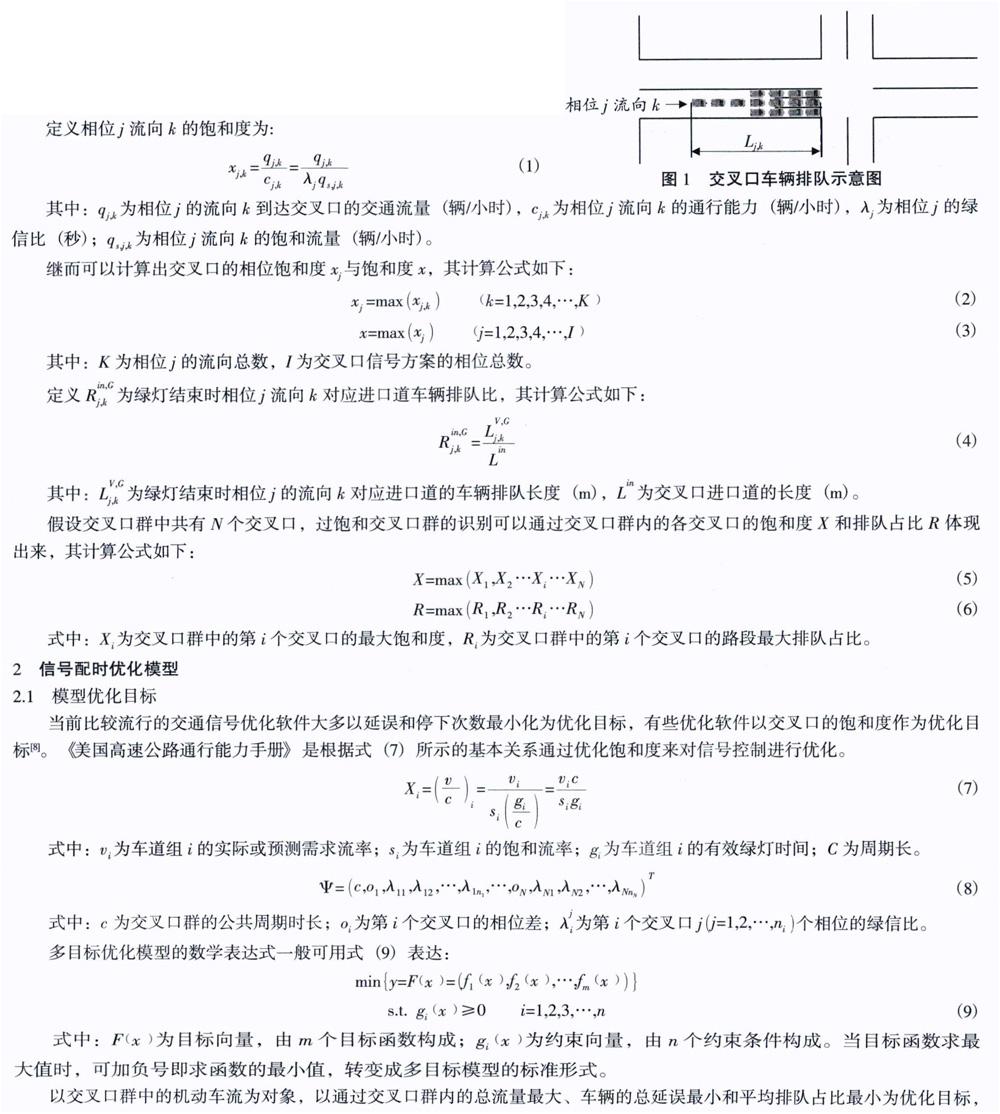
过饱和状态的识别是进行信号优化的前提,只有对交叉口或交叉口群的状态有个准确的识别,才能对其进行优化控制。单点交叉口的过饱和状态一般是指车辆到达率超过了交叉口的通行能力,而交叉口群的过饱和状态往往指群内某个或几个关键交叉口的过饱和现象已经扩散,并造成了交叉口群整体的阻塞。以往的过饱和识别以交叉口的饱和度作为是否过饱和的依据,但是路段的饱和度主要是基于道路上的排队长度。所以本文将从过饱和交叉口群内的饱和交叉口人手,通过计算交叉口的飽和度和车辆排队占比,进而定量的识别交叉口的过饱和状态。交叉口布局与车辆排队车辆如图1所示:
但是在过饱和状态下,对稳态交通流适用的优化目标往往不再适用。在交叉口群发生过饱和时,会出现排队溢出这类现象,很难去准确地计算出饱和度。当出现过饱和现象时,首先是要避免交叉口群“卡死”,需要尽快地清除滞留的拥堵车辆,避免拥堵的进一步扩散。使用信号优化的方法使过饱和交叉口群实现正常运行的实质是:通过调整交叉口群内各个交叉口的绿灯时间和相位差来快速地疏散滞留车辆。所以选取交叉口群内部的通行量最大,延误最小和平均排队占比作为过饱和状态交通信号控制的优化目标。
2.2建立多目标优化模型
假定一个包含Ⅳ个交叉口的交叉口群,主要通过优化交叉口群内各个交叉口的信号控制方案里的绿灯时间、相位差和交叉口群的公共周期时长,我们可以用如下列向量ψ来表示这些优化变量。
2.3多目标优化模型求解
对于本文这种维数较高的非线性的多目标优化问题,目前已经提出了多种的基于遗传算法来求解Pareto最优解。NSGA-II算法是目前较为流行的多目标遗传算法之一,它克服了非劣排序遗传算法复杂性高的缺点,拥有运行速度快和解集收敛性高的优点,现已成为其他多目标规化算法评价性能的基准。此算法是改进第一代非支配排序遗传算法得来的,加入了快速非支配排序算法、引进了精英策略和采用了拥挤度和拥挤度比较算子,提高了算法的运算效率和鲁棒性。NSGA-II算法详细的过程描述如下:
Step1进行参数设置,并随机产生初始种群po,对其进行非劣排序,并计算目标函数值。
Step2再对初始种群进行选择、交叉和变异,形成新种群QO,令t=0。
Step3形成新群体Rt,再次进行非劣排序,得到新种群非劣前端F1,F2…。
Step4对得到的F1进行根据拥挤度比较的排序,最后选择Ⅳ个最优的个体组成种群Pt+1。Step5对种群pt+1进行复制、交叉与变异,最终产生新的种群Qt+1。
Step6如果结果达到设定的终止条件,那么终止交叉变异;否则,令t=t+1,回转到Step3,继续循环。
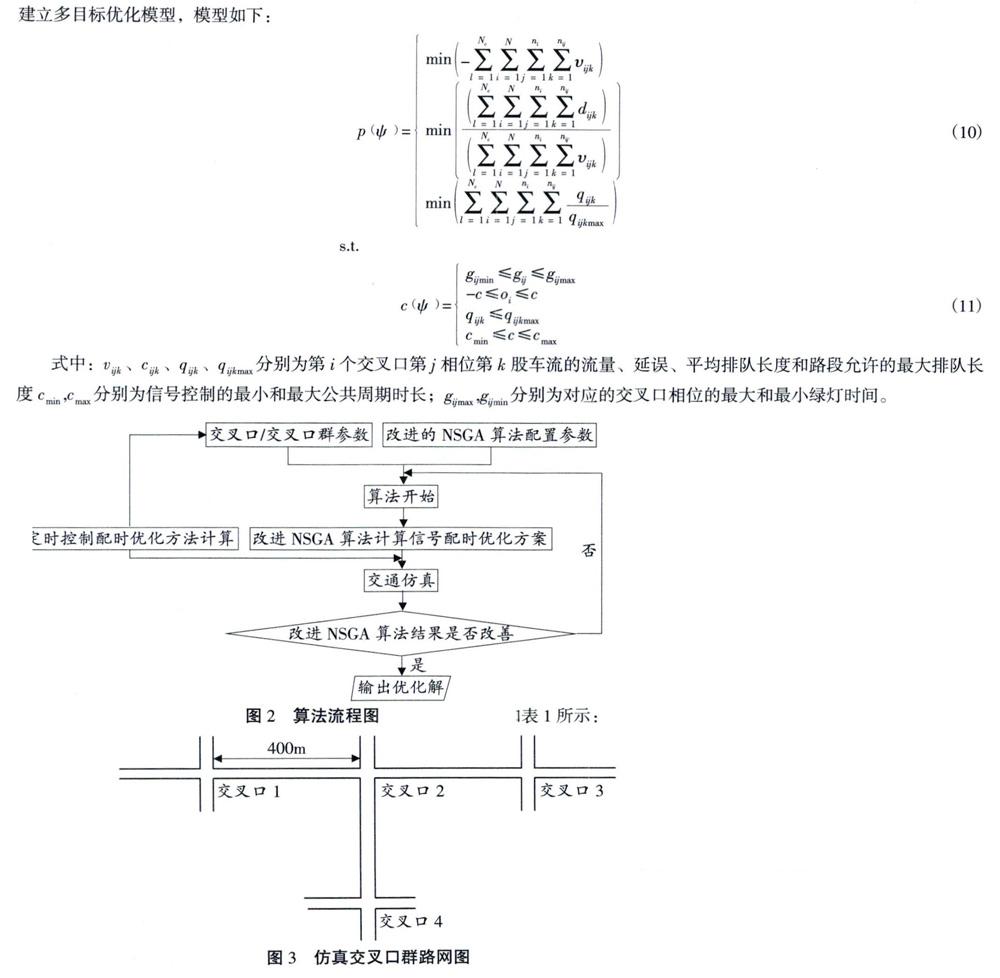
本文通过应用过饱和交叉口群通过车辆数、平均延误和平均排队占比,建立优化模型,输入信号控制参数,并利用算法求解。可通过改进的算法直接对各交叉口的信号配时进行优化,得到最优配时方案。算法的流程图如图2所示:
3仿真验证与分析
交通信号控制模型和算法的验证一般有两种方法:仿真应用验证和现场应用验证。由于仿真应用实验具有易于实现和调试灵活的优点。而现场应用仅适用于工程运用阶段,所以本文采用仿真验真的方法。
3.1路网及参数设置
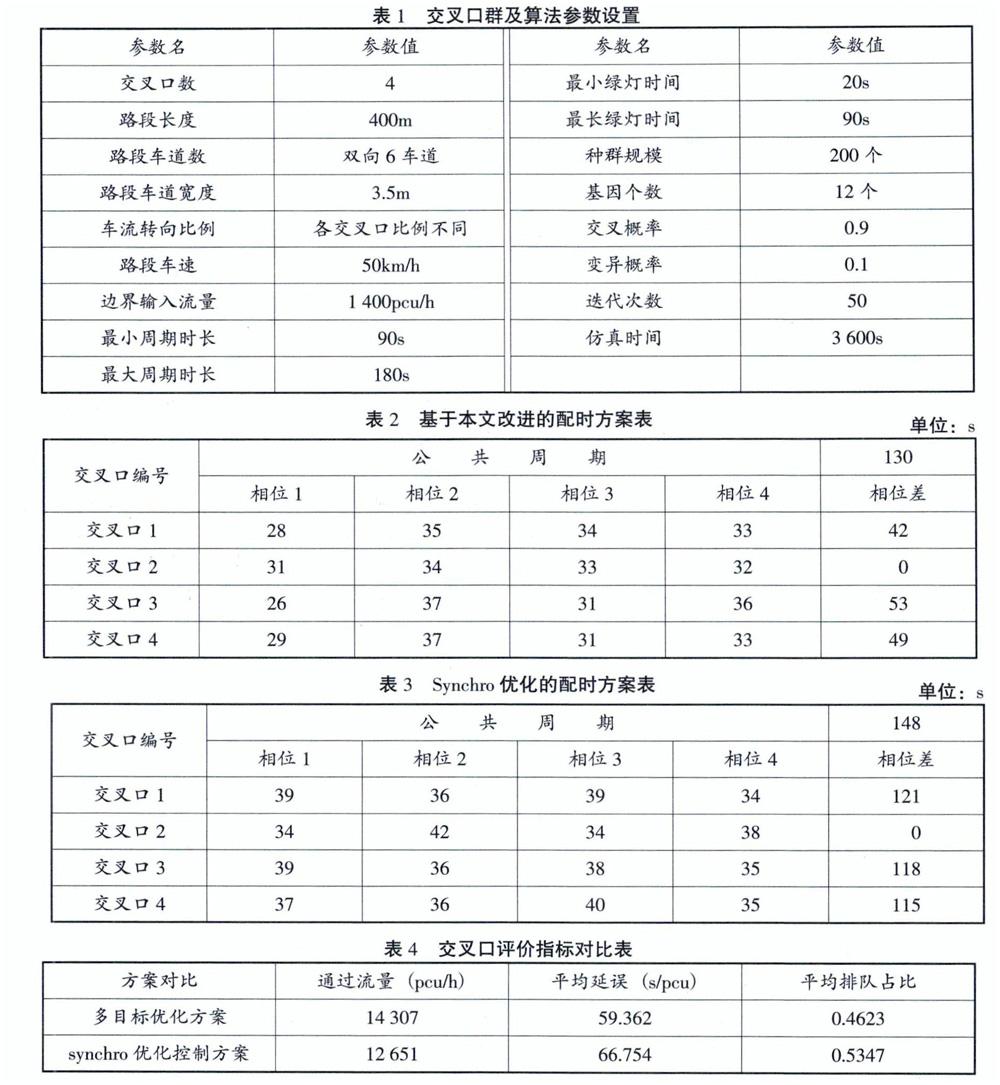
设置的路网结构如图3所示,具体的参数设置如表1所示:
3.2仿真结果
根据上文建立的交叉口群配时优化模型最后得到的各交叉口的配时方案,见表2。同时利用Synchro信号配时优化软件得到一组过饱和交叉口群的优化方案,用两种优化方案对比评价指标,来验证多目标优化的先进性。Syn-chro配时优化方案见表3。
将得到的两种配时方案输入VISSIM仿真软件中,通过检测器的设置,得到两种控制方案的评价指标对比如表4所示:
由图4可以看出,在基于改进的遗传算法得到的信号配时方案下,在建立的交叉口群内总通行车辆数提高了13%,车辆平均延误下降了11%,平均排队占比下降了14.8%。说明建立的模型对整个交叉口群层面的优化是有效的,验证了算法对于过饱和交叉口群信号优化的适用性和准确性。
4研究结论
对交叉口群的过饱和状态进行了识别,在此基础上,建立了适用于过饱和交叉口群的多目标优化模型。通过仿真评价,表明了本文模型和算法的有效性,实现了对过饱和交叉口群拥堵的疏解。但是仿真用的路网和数据是基于理想条件设置的,后续可以用现实路网和数据进行应用。
