无人库区过跨车自动控制系统研发
2019-12-10安乐新
安乐新
摘 要:本文主要介紹了无人库区过跨车自动控制系统,包括了PLC硬件组态、PLC与变频器的通讯、PLC与无人库区二级系统的通讯、手动控制功能、自动控制功能、以及涉及到的安全方面的连锁保障。系统的研发充分考量了安全连锁和运行效率,能有效避免安全事故发生,并保障了库区设备整体运行效率。
关键词:无人库区;过跨车;自动控制
中图分类号:TG338 文献标识码:A 文章编号:1671-2064(2019)20-0040-02
0 引言
随着国内外无人天车行业的兴起,相关设备及控制技术亦随之发展,过跨车作为无人天车集群控制的桥梁设备,承担着库存产品过跨调度的重要任务。传统过跨车采用手动控制,已经不能满足高度自动化的业务需求。因此,为了满足无人天车系统的控制要求,进一步提高无人天车系统的工作效率,必须实现高效准确的自动过跨功能。过跨车自动控制系统作为无人天车系统的重要一环,对于库区管理智能化和无人天车系统自动化具有实际应用意义。过跨车的定位精度更是直接影响无人天车系统运行效率及可靠性。
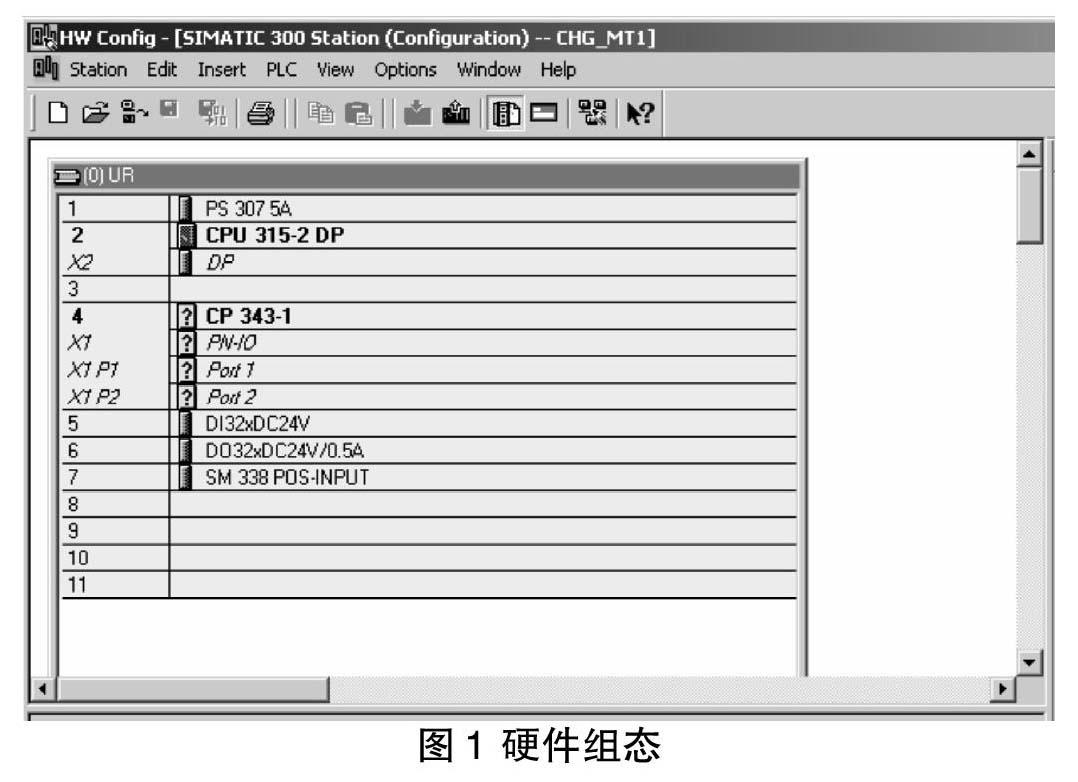
1 硬件组态
过跨车自动控制系统基于西门子300PLC构建,采用STEP7-V5.5进行模块化编程。系统整体硬件包括过跨车PLC柜、变频器柜、轨道、过跨车本体、声光报警器、无线通讯模块、手持操作盒、变压器等。PLC硬件主要包括:电源模块、CPU、以太网卡、IO模板、SM338,PLC硬件设备安装在过跨车车载PLC柜内,硬件组态如图1所示。PLC柜内还安装有无线模块,与天车二级系统通讯,构成完整以太网络。过跨车由两台变频电机驱动,交流380V电源引自现场动力柜,由降压变压器降到交流36V,通过线缆连接到过跨车轨道,车体上通过升压变压器升到交流380V到达电机。
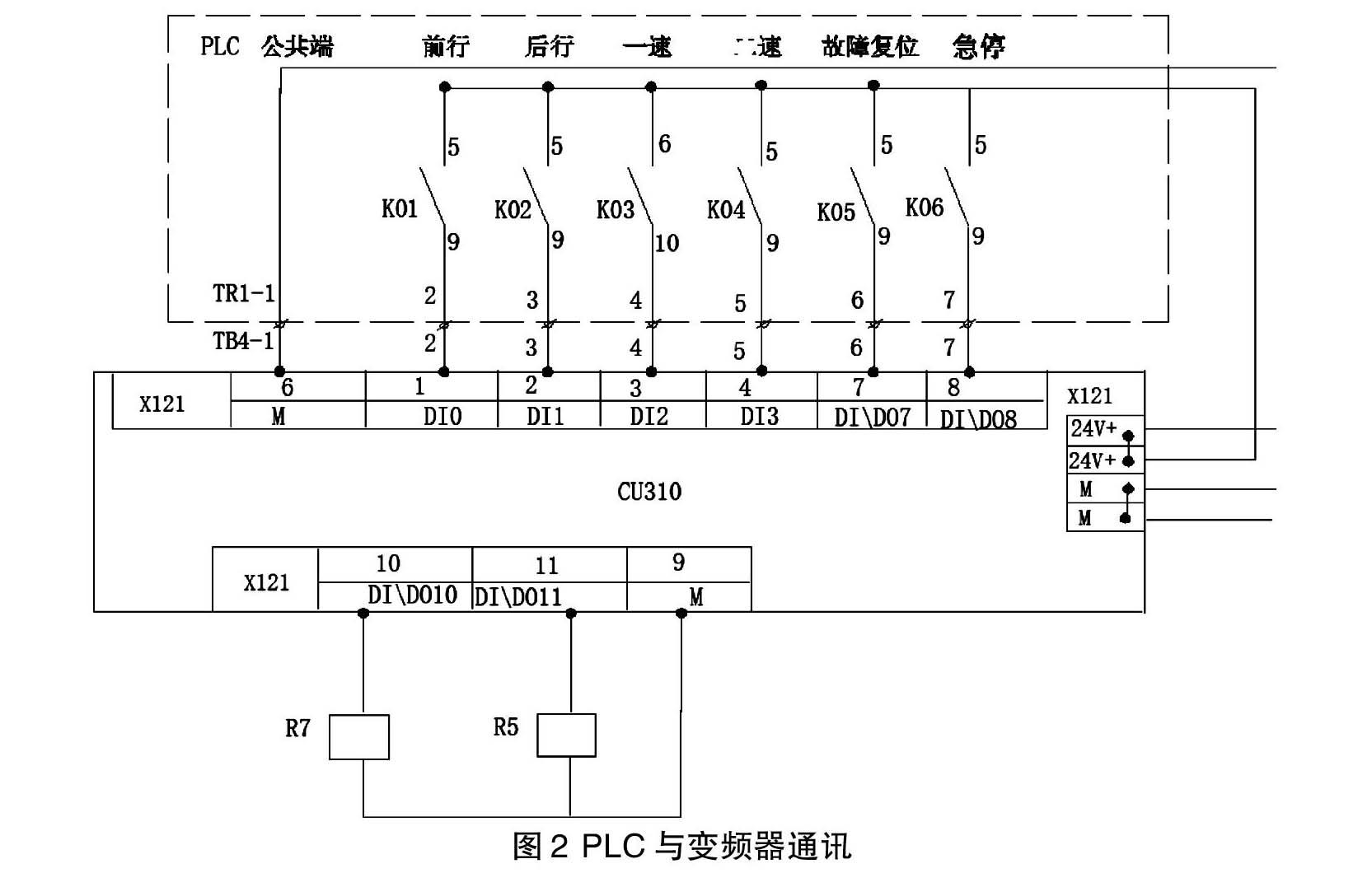
2 PLC与变频器通讯
为了保障通讯质量及可靠性,PLC和变频器采用现场硬线进行实时通讯,通讯内容包括:前进、后退、高低速模式、故障复位以及急停,如图2所示。
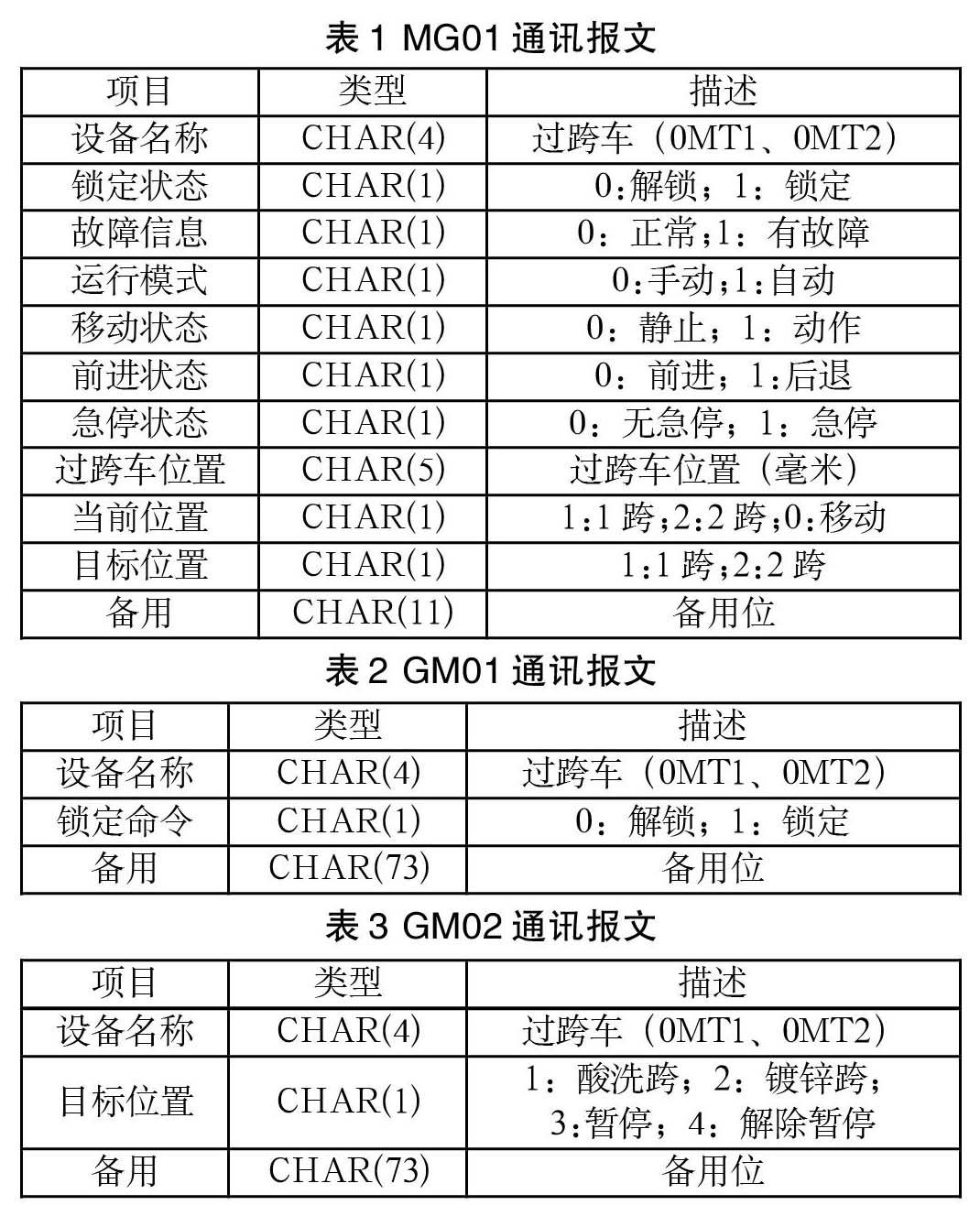
3 PLC与无人天车二级系统通讯
过跨车自动控制功能即无人为干预,过跨车的动作完全根据无人天车二级系统来控制。当过跨车处于运行状态时,安装在车上的声光报警器会响,提示周围人员禁止靠近。过跨车与无人天车二级系统通过无线方式进行通讯,通讯协议采用TCP/IP协议。过跨车PLC会将过跨车的设备状态信息(MG01)发送给无人天车二级系统,具体包含设备名称、锁定状态、错误信息、运行模式、移动状态、前进状态、急停状态、过跨车实际位置、当前位置以及目标位置等信息。无人天车二级系统发给过跨车PLC的报文有两个,即GM01和GM02。GM01包含设备名称、锁定命令、解锁命令;GM02包含设备名称、目标位置下发、中途暂停以及解除暂停。报文信息如表1、表2和表3所示。
4 手动控制功能
为了保障系统更灵活、更安全,过跨车自动控制系统分为手动和自动两种模式。
车上设置一个手持操作盒,包含手自动切换、前进、后退、急停、复位等按钮,用于手动操作。当按下前进按钮时,K01继电器熄合,变频器DI0通道接收到信号,从而驱动过跨车前进。轨道两侧安装前进、后退极限开关,使过跨车运行到该位置能够停止,避免撞到两侧挡铁。在手动模式下增加一键到位功能,即操作工手动操作过跨车时,不需要长期按着前进或者按钮,点一下前进按钮,过跨车便直接运行到另一跨指定的位置,避免过跨车由于人为参与造成定位不准确。过跨车本体上安装激光测距传感器,用来采集过跨车的实际位置,激光测距有效测量距离为50M。
5 自动控制功能
当手持操作盒切换至自动档位,系统采用自动控制。PLC实时采集传感器信息,经PLC逻辑判断,通过输出点控制继电器动作,从而控制过跨车动作。
过跨车的自动流程为:一跨的天车自动将钢卷从库区鞍座吊起到安全高度,大车以及小车朝过跨车方向移动。如果过跨车没有预先到达指定取卷位置,天车会在目标位置旁边等待,待过跨车移动到最终取卷位时,此时天车大车及小车开始动作,移动到过跨车的正上方。过跨车到位后,无人天车二级系统会发送锁定命令,在锁定后,过跨车不允许任何动作。如果此时过跨车没有锁定,天车处于上方等待,直到收到锁定状态后才能够放卷。将钢卷放到过跨车鞍座后,夹钳提高到指定的安全高度,此时会让过跨车解锁,朝着另一跨动作。过跨车载着钢卷运行到指定位置后将其锁定,此跨天车自动将钢卷从过跨车上吊往库区。这就是整个自动流程。在自动运行过程中突发紧急状况后,在二级画面上可以点击暂停按钮,此时过跨车会暂停,需要继续执行该工单时点击解除暂停按钮即可。
6 自动安全联锁
(1)当过跨车处于运行状态时不允许执行锁定命令,只有当过跨车处于两跨指定取放卷位置且处于静止状态时才能锁定。
(2)当过跨车自动未执行完成,模式由自动切换为手动时,需要清除之前自动所有的指令,避免恢复自动模式后过跨车执行之前动作,造成人员伤亡。
(3)当发生急停、变频器报错以及激光测距传感器数值为零均不允许执行自动动作并清除所有的自动指令,待设备及传感器恢复正常后重新下发指令。
(4)过跨车移动到距离目标位置适当距离时将进行减速,可以减小在停止时由于惯性造成的制动距离,从而提高过跨车定位精度。如果最终算出过跨车停止位置偏差太大,则不允许天车进行放卷或者吊卷任务。
7 结语
无人库区过跨车自动控制系统的研发,改变了以往手动操作的模式。自动模式下,无需现场操作工参与,配合无人库区管理系统以及无人天车自动系统,使得整个库区实现智能无人化。通过现场一系列传感器加以程序控制使得过跨车在自动运行时能够定位精准,极大提高了无人库区天车的工作效率。研发及投用过程考虑了众多安全连锁方面的问题,有效的避免了安全事故发生,在安全方面具有重要意义。
