无人机倾斜摄影技术在大型水利桥闸除险加固工程中的应用
2019-12-09李煜东
李煜东
(广东省水利电力勘测设计研究院,广东 广州 510635)
近年来,随着材料科学和自动控制工程的快速发展,国内外无人机行业得到快速进步,无人机遥感以其机动灵活、实时性强、成本需求低等优势,迅速成为快速获取地理数据的有效手段[1]。目前在水利水电工程设计中,均需要应用“BIM+GIS”技术获得真实地理位置的三维模型,以用于设计规划及全生命周期管理[2- 4]。对于摄影测量无法完整获取三维建模的立面结构,倾斜摄影技术能够完美的弥补这一缺点,目前市场人机搭载小型倾斜镜头就逐渐成为关注和研究的热点[5- 6]。在对于桥闸这种单一轴线型模型进行处理时,往往存在两种问题,①桥与桥闸结构单一,照片相似度高,在解算空三配准时存在局部误匹配,生成模型存在分层现象、局部拉花或空洞;②桥闸是单一轴线型目标难以利用四周布控像控点进行均匀布控而有效控制误差,空三计算往往会失败。为有效解决这一问题,本文介绍了基于倾斜摄影技术方案,通过实景三维建模软件Context Capture与修模软件DPmodel相结合,得到高分辨率精细三维模型。
1 倾斜摄影的目的和方法
倾斜摄影的主要目的是获取地表建筑物的空间位置、几何形状、大小,以及侧面和顶部纹理信息,通过三维建模真实反映建筑物的纹理和几何特征。传统正射摄影只能获取地面及建筑物的平面位置、空间分布和顶层投影,而忽略了侧面纹理和几何形状。倾斜摄影相机就能够有效补充建筑物侧面纹理信息和几何形态,从而得到真实、完整的三维模型[7]。
无人机倾斜影像三维建模的关键技术包括数据预处理、空中三角测量、多视影像密集匹配、纹理映射等。倾斜影像数据预处理主要为格式转换、旋转影像、畸变差改正和图像增强处。空中三角测量依据航空影像上量测的像点坐标来进行严密数学模型区域平差,快速解算影像的内方位元素及地面点加密问题。倾斜摄影空三结算的结果就是将倾斜影像还原成正射影像,基本过程主要包括影像预处理、光束法区域平差,基于特征点的影像匹配和生成正射影像等步骤。常用的影像匹配方法有两种,一是基于像方灰度的匹配算法如相关系数法、相关函数法、协方差函数法、差平方和法、差绝对值法、最小二乘影像匹配法;二是基于特征匹配的算法,如金字塔多级影像匹配算法、SIFT算法等[8- 9]。SIFT算法能够较好地提取像方特征点,能够较好的保证匹配的正确率,也是目前用于图像匹配最好的算法。纹理映射是制作三维模型流程的最后一步,也是增强模型视觉效果的关键。一般来说,纹理映射的过程就是二维到三维的映射关系,将纹理空间中的纹理像素映射到屏幕空间中的像素的过程,其实质是建立从屏幕空间到纹理空间及纹理空间到景物空间的两个映射关系。三维模型需要多幅影像中的视图来作为模型的纹理图,来完成纹理映射过程,才能使整个模型纹理贴合、真实。
2 试验区数据获取与分析
2.1 工程背景概况
龙海市西溪桥闸位于九龙江西溪下游龙海市榜山镇洋西村,距漳州市约12km。水闸于1967年1月动工,1970年6 竣工,为大(Ⅰ)型水利工程。闸址以上流域面积3930km2。桥闸全长1km,由654m长的拦河闸和346m长的引桥土堤组成,共有99孔,其中排涝拱2孔,排洪拱11孔,单板闸2孔,拦河闸83孔(其中先启孔31孔,每孔净宽4~5m;后启孔52孔,每孔净宽5m),船闸1孔,总净宽546.7m,闸孔(拱)上为钢筋混凝土公路桥[10- 12]。
随着桥闸的投入使用,桥闸闸底淤泥越来越严重,关闸困难,至后来由于河道大量采砂,河床泥沙被掏空。通过1998年对水下地形图复测,发现多处深冲坑,河床变化很大,桥闸右岸铺盖齿墙下板桩裸露,流墙末端断裂长3m。至2000年,西溪桥闸在安全鉴定过程中被认定为险闸,结构损坏严重,随时有塌陷风险,修复十分困难,且把握不大,建议重建桥闸。由于资金困难,提出临时过渡措施——经除险加固后降低标准使用。本项目作为我院的水利水电工程采用信息模型试点项目,要求提供可使用的三维数据,故采用倾斜摄影技术获取本工程项目所需的三维实景模型用于设计维修加固。
2.2 飞行数据获取
根据此次项目需求,获取西溪桥闸上游1km,下游800m区域范围内(面积约1.8 km2)的正射影像图及桥闸区域的实景三维模型。使用的无人机为小型固定翼无人机(型号为ebee)和单镜头旋翼无人机(型号为DJIInspireⅡ),ebee无人机用于获取全区域的正射影像,DJI无人机用于获取桥闸范围倾斜影像。在设计单独对桥闸建筑物拍摄倾斜照片时使用旋翼机DJI无人机,进行多角度、多重叠飞行拍摄,以满足制作高分辨率的桥闸三维模型。飞行区域范围及航线设计示意图如图1所示。

图1 航飞区域范围及倾斜摄影飞行航线设计示意图
设计飞行角度为正面、背面相机镜头分别倾斜15°、55°、85°,以及-10°(以桥闸面高水平面为0°计算)航飞,确保在各个角度均能拍摄到足够多的相片,避免航摄漏洞,且能够满足三维重建过程中要求的影像重叠率(航向和旁向重叠度均为60%~80%),共获取了桥闸区域约5000张照片。
3 数据后处理及修模
3.1 空三前预处理
由于获取的原始影像不可避免地存在色调不一致、部分影像有水雾、几何畸变等问题,因此在对影像进行空中三角测量前,需要进行匀光匀色、去雾、影像畸变校正等处理。倾斜影像制作三维实景模型流程图如图2所示。

图2 倾斜影像制作三维实景模型流程图
3.2 空中三角测量数据处理
研究采用ContextCapture软件进行数据处理,利用倾斜影像制作三维实景模型。首先将桥闸区域和非桥闸区域内的照片分为两个区块,分别进行空中三角测量。在分块处理空三处理时需要对空三过程进行优化处理,用以保证空三和三维点云的精度。
由于单镜头无人机飞行采用的是GPS,精度为单点定位,位置精度一般,在获取影像的曝光瞬间不能直接作为三维建模的空间位置解算,需要在测区范围四周外布一些精确控制点进行布控,用于精确空三解算得到影像的外方位元素。不同于其他区域的空三布设方案,由于该桥闸是长轴线型桥闸(长度600多m),无法布设四周均匀分布的像控点,在桥面布设直线分布的控制点无法控制,且桥闸左右两边均为水域,空三无法通过,出现空三区块分层问题。因此在进行空三之前,需要人为添加多个连接点来加密控制,以使模型能够像刚体结构连接通过空三解算。在处理本项目时,未加连接点之前,桥闸模型出现5块分层区块,空三失败。通过人为在桥闸区域加入13个有效连接点进行控制,选择连接点时选用清晰、分布均匀的点,每个连接点刺尽可能多的照片,以满足整体控制要求,最后方通过整体空三。在桥闸外部区域(陆地部分)空三解算时采用的是外方位元素+使用RTK测得的像控点方法,此方法所得到的空三处理结果最好,三维建模精度最高并且能节省时间。另在模型匹配时会有部分区域发生变形或扭曲,因此在空三时要注意剔掉底部或顶部分层的照片。
分块空三通过后可获取每一张影像的外方位元素同时生成高密度的三维点云,然后将两个区块进行融合,提交三维重建任务,基于融合后的空三成果和点云数据提取维度图并构建三维TIN,同时对三维TIN进行平滑和构建金字塔信息,最后根据三维TIN的空间位置信息,获取最佳视角的原始影像,自动映射纹理,贴合模型即可形成高精度的实景三维模型。成果如图3所示。

图3 西溪桥闸实景三维模型初始成果图
3.3 模型精细化处理及精度分析
空三通过之后提交三维重建工程,输出三维模型,一般数据输出格式为3mx、osgb和obj格式。生成的模型往往存在局部变形、水面空洞、物体拉花等问题,这些都需要对模型进行重新修饰,保证模型完整、位置正确。
DPModel软件采用高分辨率的航空影像通过透视成像原理,快速提取建筑物轮廓,进行自动纹理映射,完成模型重建。通过多角度的倾斜影像建模,可以使模型与影像完全套合,保证位置准确。模型贴图直接采用影像中的纹理信息,自动映射纹理进行模型贴合,实现ContextCapture自动建模中模型变形后修模处理。
将生成osgb和obj格式的数据集及消畸变后的影像导入到DPmodel解决方案中去,然后生成缓存影像。打开DPmodel文件,在建模菜单栏中新建工具,画出单个桥墩模型,以及桥面和周边桥闸管理所建筑物的立体结构,创建完成后选择自动纹理映射完成单体模型建立。对于建筑物空洞、漂浮物利用obj文件进行修饰补平或去除,房屋立面修饰用房屋墙线拉直功能将其拉直。完成修饰工作之后将osgb及obj文件保存导出,后期可导入Context Capture软件中,利用修饰好的模型输出设计部门需要的格式(3mx)。通过修饰后的模型可以看出建筑模型棱角清晰、层次有序、结构完整,能清晰直观反映真实三维建筑模型。如图4所示。
为进一步研究无人机倾斜摄影实景建模技术在实际工程的应用可行性,在本项目工程中利用RTK在测区内实测了部分测量点的坐标,并与生成的三维模型量测坐标进行对比,对比结果见表1。结果表明本工程生成的实景三维模型满足1∶500测图精度,能够用于工程设计所需要的地形资料。
经模型量测数据与RTK实测数据对比,平面精度中误差为0.08m,高程精度中误差为0.11m。
4 结语
本文通过无人机倾斜摄影技术重建出精细化实景三维模型,既能满足测绘精度要求,又能够反映真实的三维地理信息,能较好地为桥闸修复三维设

图4 精细化建模后建筑及桥闸的实景模型
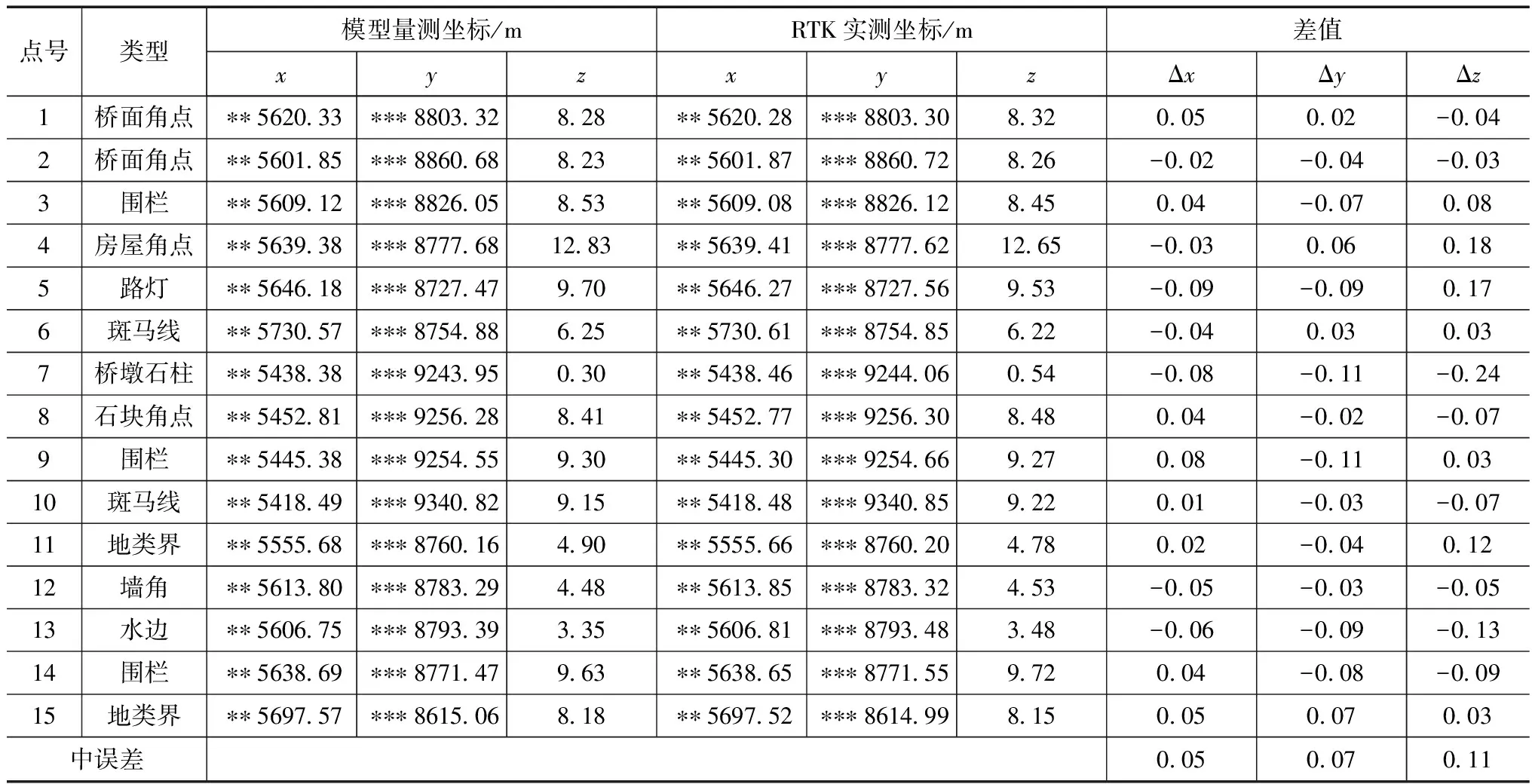
点号类型模型量测坐标/mRTK实测坐标/m差值xyzxyzΔxΔyΔz1桥面角点∗∗5620.33 ∗∗∗8803.32 8.28 ∗∗5620.28 ∗∗∗8803.30 8.32 0.05 0.02 -0.042桥面角点∗∗5601.85 ∗∗∗8860.68 8.23 ∗∗5601.87 ∗∗∗8860.72 8.26 -0.02 -0.04 -0.033围栏∗∗5609.12 ∗∗∗8826.05 8.53 ∗∗5609.08 ∗∗∗8826.12 8.45 0.04 -0.07 0.084房屋角点∗∗5639.38 ∗∗∗8777.68 12.83 ∗∗5639.41 ∗∗∗8777.62 12.65 -0.03 0.06 0.185路灯∗∗5646.18 ∗∗∗8727.47 9.70 ∗∗5646.27 ∗∗∗8727.56 9.53 -0.09 -0.09 0.176斑马线∗∗5730.57 ∗∗∗8754.88 6.25 ∗∗5730.61 ∗∗∗8754.85 6.22 -0.04 0.03 0.037桥墩石柱∗∗5438.38 ∗∗∗9243.95 0.30 ∗∗5438.46 ∗∗∗9244.06 0.54 -0.08 -0.11 -0.248石块角点∗∗5452.81 ∗∗∗9256.28 8.41 ∗∗5452.77 ∗∗∗9256.30 8.48 0.04 -0.02 -0.079围栏∗∗5445.38 ∗∗∗9254.55 9.30 ∗∗5445.30 ∗∗∗9254.66 9.27 0.08 -0.11 0.0310斑马线∗∗5418.49 ∗∗∗9340.82 9.15 ∗∗5418.48 ∗∗∗9340.85 9.22 0.01 -0.03 -0.0711地类界∗∗5555.68 ∗∗∗8760.16 4.90 ∗∗5555.66 ∗∗∗8760.20 4.78 0.02 -0.04 0.1212墙角∗∗5613.80 ∗∗∗8783.29 4.48 ∗∗5613.85 ∗∗∗8783.32 4.53 -0.05 -0.03 -0.0513水边∗∗5606.75 ∗∗∗8793.39 3.35 ∗∗5606.81 ∗∗∗8793.48 3.48 -0.06 -0.09 -0.1314围栏∗∗5638.69 ∗∗∗8771.47 9.63 ∗∗5638.65 ∗∗∗8771.55 9.72 0.04 -0.08 -0.0915地类界∗∗5697.57 ∗∗∗8615.06 8.18 ∗∗5697.52 ∗∗∗8614.99 8.15 0.05 0.07 0.03中误差 0.05 0.07 0.11
计方案提供真实可靠信息模型。但目前我国三维设计还没有相关的规范,倾斜摄影输出三维模型格式与BIM设计格式不完全统一,在水利水电工程应用中还不具备普适性和广泛性。本文就测绘倾斜摄影测量实景建模给出了相关技术方案,但实际三维设计应用还需要结合水利水电工程需求,建立相关规范和设计模板,借助无人机倾斜摄影测量技术为三维设计工作提供更有力技术支撑,在我国水利水电工程建设中发挥更大作用。