异步电动机转矩-转速特性测试研究
2019-12-06陈凯陆思瀛姜拴雷吴亚旗
陈凯 陆思瀛 姜拴雷 吴亚旗


摘 要: 本试验采用电机转子转动惯性作为启动负载的方法,测得电机在出厂试验中转矩转速特性。实验中,在轴端安装旋转编码器,因主轴旋转使得编码器输出脉冲信号并送至STM32F407单片机输入捕获端口。经过单片机定时器捕捉处理,获得给定时间内脉冲数目并通过串口送至上位机,利用MATLAB数据整理,绘制转速时间曲线和转矩转速曲线。根据转速时间曲线,在电机空载自由减速阶段,求得转动惯量,空载启动阶段求得电机角加速度,利用加速转矩为转动惯量与角加速度之积,获得电机转矩。
关键词: 转矩;转动惯量;转速;单片机MATLAB
中图分类号: TM343 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.10.037
本文著录格式:陈凯,陆思瀛,姜拴雷,等. 异步电动机转矩-转速特性测试研究[J]. 软件,2019,40(10):162165+201
Research on Torque-speed Characteristics of Asynchronous Motor
CHEN Kai1*, LU Si-ying2, JIANG Shuan-lei1, WU Ya-qi3
(1. School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 200000, China;
2. Shanghai Electric wind power group Co., LtD, Shanghai 200000, China;
3. Shanghai Hanying Electric Co., LtD, Shanghai 200000, China)
【Abstract】: In this test, the rotation inertia of the motor rotor is used as the starting load method to measure the characteristics of the motor in the factory test. In the experiment, a rotary encoder is installed at the shaft end. The rotation of the spindle makes the encoder output pulse signal and send it to the input and capture port of STM32F407 single-chip microcomputer. After the single-chip timer capture and processing, the number of pulses in a given time is obtained and sent to the top machine through serial port. MATLAB data is used to compile the speed time curve and torque speed curve. According to the rotational speed time curve, the moment of inertia of the motor can be obtained at the stage of no-load free deceleration, and the angular acceleration of the motor can be obtained at the stage of no-load start. The acceleration torque is the product of the moment of inertia and angular acceleration to obtain the motor torque.
【Key words】: Torque; Moment of inertia; Rotating speed; MCU; MATLAB
0 引言
目前,研究電机的转矩转速特性多采用在主轴上逐渐增大负载的方法[1],实验设备较多。现通过不用连续增加负载,空载条件下,研究电机转矩转速特性。对于电机制造厂,电机转矩转速特性主要通过型式试验获得。因型式试验需型式试验站,型式试验站成本高,多存在于研究试验中心及大型企业[2]。中小型厂家通过抽取部分成品样机进行实验,实验结果作为某一型号产品的转矩转速特性。中小型电机制造厂都会进行成本相对低的出厂试验,现于出厂试验中,电机空载启动,检测实时转速,通过对转速数据处理获得转矩转速特性。以期型式试验之前,获得电机转矩转速特性。
1 概述
异步电动机转矩-转速特性曲线是异步电动机的一项重要特性。转矩转速曲线的形状及曲线中启动转矩、最小转矩及最大转矩是衡量一台电机能否顺利启动和稳定运转的重要指标[3]。在成品出厂前,生产厂及使用单位常需电机转矩转速曲线。本文现基于单片机与MATLAB软件进行动态测试,通过 采集转速脉冲信号及数据处理,获得电机转矩转速特性。
2 工作原理
动态测试法是在电机空载启动过程中连续测量瞬时角速度及相应加速转矩来直接获得电机的转矩转速曲线[4]。当电机空载启动时,电机产生的电磁转矩除用于克服空载摩擦转矩外,全部用于产生角加速度,其转矩平衡方程如式(1):
(1)
式中,T为电磁转矩,单位N?m;T0为空载摩擦转矩,单位N?m;Tt为加速转矩,单位N?m;J为转动惯量,单位kg?m2;dω/dt为角加速度,单位rad/s2。
通常电机在启动过程中产生的电磁转矩远大于空载阻转矩,此时式(1)可简化为:
(2)
由此可见,电机的加速转矩正比于角速度对时间的变化量[5]。利用该原理,在电机的启动过程中,利用单片机每隔一定的时间间隔测得电机的瞬时角速度ω。同时运用MATLAB软件对角速度ω进行微分运算获得正比于T的量之后,并可以显示转矩转速曲线。对于转动惯量J采用自由减速法[6],即测取1.05倍~0.9倍额定转速范围内,测定转速变化所需的时间,如式(3):
(3)
式中,Pfw为机械摩擦损耗,单位W;ns为同步转速,单位r/min。
根据GBT1032-2012《三相异步电动机试验方法》,将试验时的电压U修正至额定电压,修正关系如式(4):
(4)
式中,TN为额定电压下转矩,单位N?m;Tt为试验电压下转矩,单位N?m;UN为额定电压,单位V;Ut为试验电压,单位V。
3 软件与硬件组成
3.1 试验测试工作过程
如图1系统测试工作框图,测试系统包括上位机和下位机部分及被试电机和编码器。下位机包括数据的采集与发送,上位机包括数据的接收与转换。在采集部分,为了使电机主轴转矩有效传递到编码器上,采用橡胶联轴节。当编码器轴转一圈输出p个脉冲时,电机旋转,编码器同步转动并输出脉冲信号,通过单片机的数据采集,得到一定时间t (min)内的脉冲数目N,则电机转速n(r/min)如公式(5)。在MATLAB软件中对接收到的脉冲数,根据式(5)进行转速处理,求得角加速度,转动惯量,转矩等参数,绘出转矩转速特性曲线。
(5)
3.2 软件结构
系统应用程序由下位机和上位机程序组成[7],下位机用C语言[8]作为STM32F407单片机的编程,上位机采用MATLAB软件[9]数据处理及绘制转矩转速图像。
下位机包括主程序、中断服务程序和各子程序,用到STM32F407单片机,主要包括对编码器输出脉冲信号的捕捉、计数及向上位机发送。主程序流程如图2所示,首先对两个定时器进行初始化并开中断,其中定时器1用于定时,保证每次的时间差相同,定时器2进行脉冲的捕获、计数,两个定时器的中断子程序框图如图3。当捕获到一个外部脉冲并产生中断时,软件计数加1,直到设定时间,记录设定时间内的脉冲数。最后,把整个过程中设定时间内的脉冲数统一发送至上位机[10]。
编码器通过轴套及橡胶联轴节与轴在一起,当轴旋转时带动编码器旋转,同时编码器输出稳定的脉冲信号并送至STM32F407单片机的输入捕捉引脚PA15,且设定为上升沿有效。当单片机检测到上升沿时引起中断,中断函数里软件计数加1,直至定时器设定时间(本实验设置1 ms),保存数据至内存,即每1 ms内检测捕获脉冲数目并储存。当检测完毕,通过串口,把检测阶段数据发送至上位机,经过MATLAB软件转速、转矩处理,从而绘制转矩转速曲线。
考虑到MATLAB软件具有许多的处理数据函数,在数据分析及图像绘制方面简易优势,本实验上位机用MATLAB[11]通过编写串口接收数据程序,并转换为转速、转矩等物理量,通过曲线多项式拟合,得到转矩转速曲线。
3.3 硬件结构
硬件由被试电机、编码器、调压器及各种开关部分部分组成,其控制试验过程如下图4。
实验控制流程框图4所示,包括空气开关QS,调压器,交流接触器及被试电机。通过开关QS1闭合使三相调压器得电,调压低于额定电压,以获得电机较长启动时间[12]。通过开关QS2的闭合使得交流接触器线圈得电,主控触点闭合,电机旋转;断开开关QS2,电机自由减速至停止旋转,其中被试电机的参数如表1所示。
本实验以YPSH90L-4电机为被试对象,Pfw采用理论值19.9 W,同步转速ns为1500 r/min。
转矩转速特性的获取,需对瞬时角速度测量[13],用到E6B2-CWZ6C旋转编码器[14],表2是编码器 参数。
4 实验结果及分析
实验通过调压器,380 V调压至93 V,绘制电机在93 V下,经过平滑去除坏点,启动-稳定-减速阶段转速随时间变化散点,如图5所示。
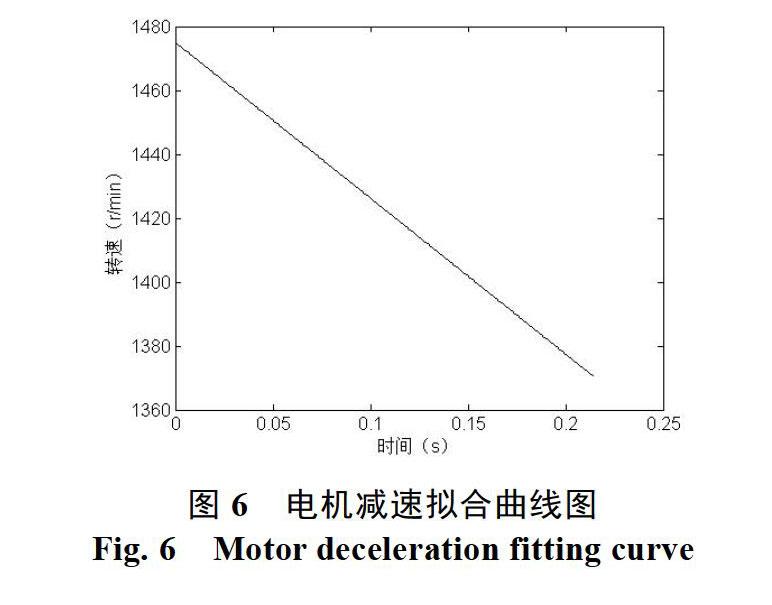
现为求得电机启动阶段转矩,需现进行转动惯量的求取,对1.05~0.9倍额定转速减速阶段数据进行多项式拟合[15],如图6,其多项拟合函数如式(6):
(6)
根据公式(6),知在减速阶段的斜率为k为–487.8,并将k带入公式(3),得转动惯量为0.0025 kg?m2。
已知启动阶段测得的速度时间采样点如图7,拟合后的速度时间曲线为图8所示,其中拟合关系如式(7):
(7)
根据减速阶段求得转动惯量0.0025 kg?m2,结合公式(2),可得到启动阶段转矩。在93 V试验电压下,拟合转矩转速曲线如图9所示。
根据修正公式(4),93 V試验电压修正到380 V额定电压下的转矩转速曲线如图9所示。启动转矩Tst为14.6 N?m。启动阶段最小转矩Tmin为11.38 N?m,最大转矩Tmax为15.17 N?m。
5 结论
本文在电机空载启动下,测电机转速并运用单片机和MATLAB软件数据处理,进行异步电机转矩转速特性研究。其中采用光电编码器进行瞬时速度的精确测量,应用matlab软件对角速度进行微分运算从而求得正比于转矩的方法。因无需另加负载的设备,电机转矩转速测试变得简便,对中、小型电机制造企业及科研单位具有一定的实际意义。
参考文献
[1]才家刚, 吴亚旗等编著. 电机试验技术手册[M]. 第3版, 北京: 机械工业出版社, 2012.
[2]程捷. 三相异步电动机测试与分析系统的开发与研究[D]. 青岛科技大学, 2017.
[3]高光. 浅论三相异步电动机机械特性曲线[J]. 职业, 2014(08): 146-147.
[4]盛超. 基于PC的三相异步电机起动特性测量系统[D]. 华中科技大学, 2005.
[5]王浩. 三相异步电动机机械特性定性分析及应用研究[J]. 时代汽车, 2018(01): 41-42.
[6]GB/T1032-2012: 三相异步电动机试验方法[S].
[7]赵冉. 基于虚拟仪器的异步电机自动测试系统的研究[D]. 大连交通大学, 2011.
[8]汪友生. 电类非计算机专业C语言程序设计实验教学研究[J]. 软件, 2018, 39(3): 99-101.
[9]雒明世, 张倩琳. 基于MATLAB的OFDM 系统仿真与教学研究[J]. 软件, 2015, 36(6): 152-157
[10]李拓, 杜庆楠. 基于TMS320F28335的三相感应电机矢量控制系统的研究[J]. 软件, 2018, 39(3): 130-135.
[11]崔智皓, 赵琪月. 基于MATLAB/Simulink的异步电机动态仿真探究[J]. 电子测试, 2014(09): 22-24.
[12]杨红权, 易长松, 吴希再. 数字式异步电机转矩转速测量装置的研制[J]. 水电能源科学, 2009, 27(02): 191-193.
[13]张斌. 感应电动机转矩—转速特性测试系统的研究[D]. 哈尔滨工业大学, 2006.
[14]李浩, 戴志涛. 基于异构多核的H. 264编码器研究与实现[J]. 软件, 2015, 36(1): 110-115.
[15]张锐, 王剑平, 杨晓洪. 基于改进 SRUKF 的感应电机直接转矩控制[J]. 软件, 2018, 39(4): 56-62.
