模块化航天机电伺服系统多学科集成设计与优化
2019-12-05蒋孟龙安林雪朱阳贞
蒋孟龙,安林雪,朱阳贞
(北京精密机电控制设备研究所,北京 100076)
0 引言
伺服系统是飞行器除发动机外功率最大的子系统,是控制系统中动态特性复杂、质量大、工作环境恶劣的装置[1]。在飞行器减质、减维护和实战化需求牵引下,相较于液压伺服系统,机电伺服系统(Electro-mechanical Actuator, EMA)凭借其质量小、高效率、高可靠、易维护、易安装等优点,近年来在航空航天飞行器中得到广泛应用[2]。随着新概念飞行器向宽空域、变工况、高机动及智能化方向发展,对EMA多样化的需求日益增多,迫使相关工业部门针对EMA开展系列化、产品化技术研究工作[3]。实现产品化,首先需要在技术上实现模块化[4],相比于产品实物,基于知识数据传递的信息技术具有很大的柔性,较其他技术更适合开展大批量定制[5]。Zhao等[6]针对机电伺服系统的摩擦特性,建立了包含电源、驱动器、无刷电机、速度控制器、电流控制器等模块的仿真模型,并仿真复现了力矩波动对A相电流的影响。Bilyaletdinova等[7]针对以滚珠丝杠为代表的直驱式机电作动器进行了模块化建模,重点分析了摩擦参数对机电伺服系统频率特性的影响。Kim等[8]对包含非线性部件的EMA动刚度建模与试验技术展开研究,建立了机电作动器动态性能测试测量装置,通过单机到系统的仿真与试验对比,证明了所建模块化模型在分析非线性作用的有效性,支撑了舵系统对机翼颤振问题的分析。Fu等[9-10]提出了增量式建模的概念,从需求分析入手,建立机电作动器的理想模型、基本模型、高级模型,并对驱动器的热、电机的热及机械传动的热进行了仿真分析,给出了不同颗粒度的增量模型的仿真结果,较为系统地研究了热、摩擦、间隙对EMA控制性能的影响。沙丰永等[11]根据模块化思想建立了永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)矢量控制系统模块、丝杠模块和工作台模块的仿真模型,将模块之间的联轴器和丝杠螺母均等效为弹性系数和阻尼系数,继而推导了新算法,并对参数进行了整定。
由此可以看出,国内外学者们更专注于模块化的建模及非线性分析,较少涉及指引大批量定制实现的模块化设计方法研究。张立群等[12-13]将伺服系统分为通用模块和专用模块两部分进行设计,详细给出了通用模块中驱动模块和控制模块的建模过程,并采用频率响应法设计控制模块算法和确定算法参数,但并没有给出机电伺服系统详细的模块化划分及模块化设计各阶段参数传递流程。本文以数字化技术实现航天机电伺服系统模块化设计为目标,给出了航天机电伺服系统产品层、部件层和零件层的详细剖析,分析了从任务书下发到产品出图的航天机电伺服系统模块化设计流程,以基于模型的系统工程(Model Based Systems Engineering,MBSE)为指导思想,总结了针对具体设计任务的航天机电伺服系统V字研发流程,列出了各层级分析所需的数字化模型类型及相关参数,最后以某机电伺服系统的设计优化为例,说明所提模块化设计与优化方法的高效性。
1 航天机电伺服系统模块化设计
模块化设计是将一定范围内的不同功能或相同功能不同性能、不同规格的产品进行划分以满足不同需求的设计方法,是标准化的重要手段。将航天机电伺服系统按产品层、部件层和零件层进行划分,如图1所示。航天机电伺服系统一般包括电源、控制驱动器、电机、传动机构和传感器,为便于分析将负载对象也进行了剖析(工程实际中,EMA和负载一般是由不同的单位按照指标设计生产的[14])。以电机部件为例,航天常用电机包括PMSM和直流无刷电机(Brushless Direct Current, BLDC)两种,PMSM作为零件层,其模块化过程是对特征指标和几何尺寸数学表征的过程,涉及的参数包括相电阻、相电感、力矩系数、摩擦系数、损耗、额定功率和转子外径。
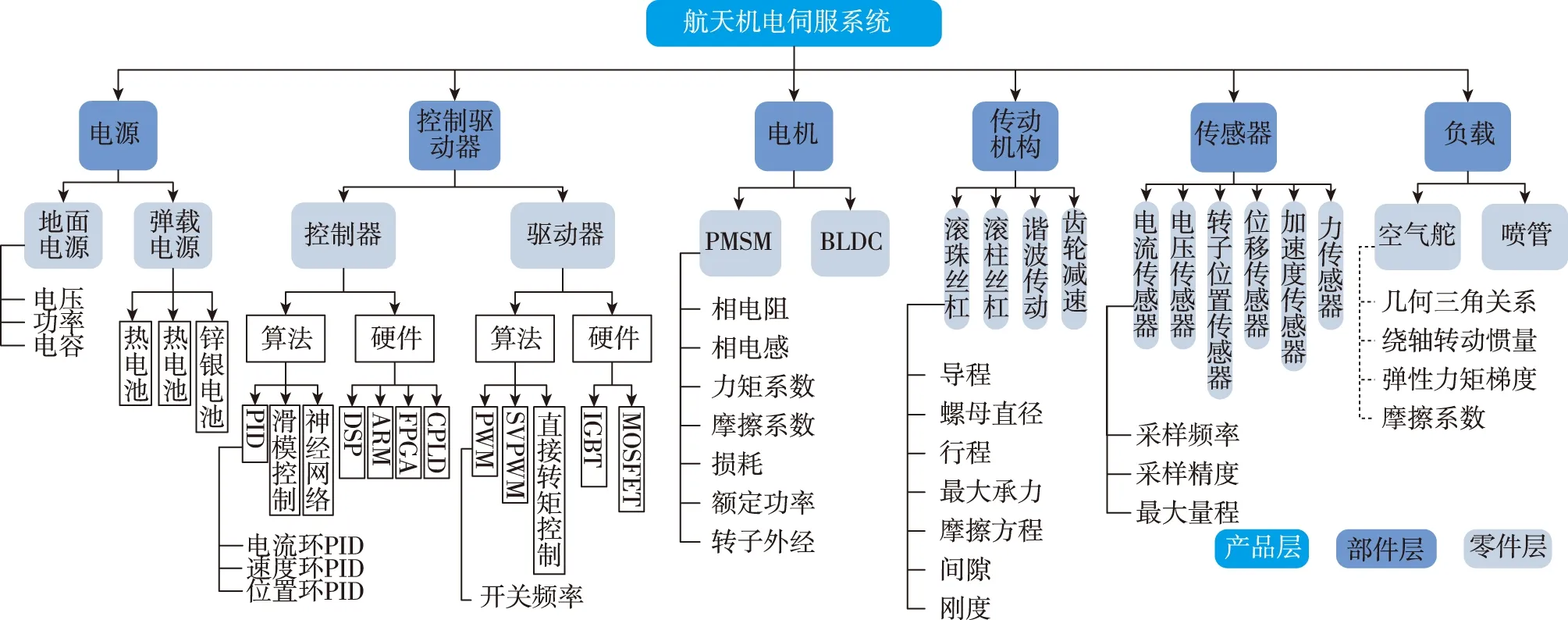
图1 航天机电伺服系统产品模块化划分
航天机电伺服系统模块化设计流程如图2所示。从接收到总体设计任务开始,首先进行任务书分析,确认需设计产品是新产品研发还是已有产品改进;若为新产品研发则首先根据图1的模块化分类进行关键部件选型;然后依据设计经验进行系统设计参数估算并进行指标分解;其次进行单机部件层模块设计,若为新单机设计则进行单机部件设计参数估算,若为已有成熟单机模块则修改设计参数并对各单机部件进行性能仿真;将仿真结果代入系统性能仿真模型中,若不满足性能指标要求,根据成熟单机部件、新单机部件和系统方案是否存在余量分别返回对应的步骤重新设计,若系统性能指标满足要求则进行复核复算;复核复算完成后若不满足要求,则需重新进行方案选型,若满足指标,则出图并进行样机试制。若经任务书分析后,需设计产品是已有产品改进,则首先需明确优化改进的目标是什么,并确定非拓朴变形的设计空间及约束;综合考虑成本和计算精度要求选取合适的优化策略;基于已有试验数据和系统仿真模型进行系统性能优化,若系统性能改善结果不满足指标要求,则根据算法是否收敛和是否有可行解返回对应步骤进行再设计,若系统性能的改善满足指标要求,则进行系统设计参数估算,并将指标分配给各成熟单机进行部件设计,完成设计参数修改并进行单机性能仿真;将单机仿真参数结果录入系统仿真模型进行系统性能复核复算,若不满足指标改进要求,根据单机是否存在设计余量返回对应步骤进行修改,若满足指标改进要求,则出图并进行样机试制。
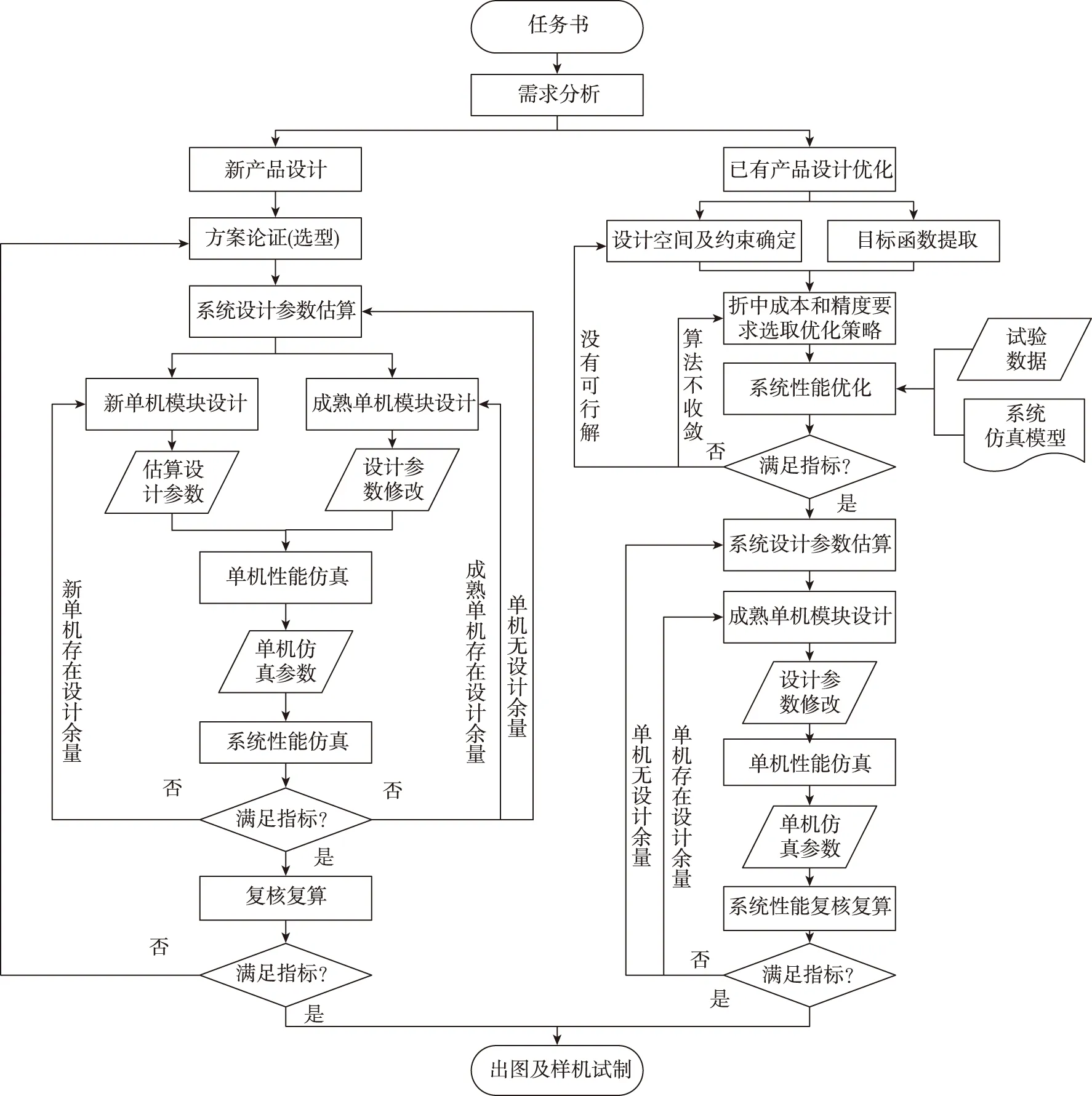
图2 航天机电伺服系统设计流程模块化
2 多学科集成设计V字流程
虽然成熟的商业仿真软件促进仿真驱动设计的繁荣,但是这些软件大多依赖于精确的几何构型(V字研发下降段的最底端才能获得),而用于V字研发流程初段的性能分析软件或模块虽然存在,但是却不足以支持工程设计需求。从图2描述流程可知,要想对航天机电伺服系统模块化设计提供良好的支撑,其关键点在于如何准确无误地实现产品层、部件层和零件层间的数据传递与反馈。图3给出了航天机电伺服系统模块化设计数据传递V字流程图,实线表示设计过程数据的正向传递、虚线表示设计过程数据的逆向反馈。从图3中可以看出,航天机电伺服系统设计是一个从产品层到零件层、零件层反馈回产品层的优化迭代过程。通常总体下发的任务书经过需求分析传递给产品层,涉及信息包括:可靠性、使用寿命、工作环境、飞行包络、刚度、几何尺寸包络等。产品层向下传递给部件层的信息利用产品参数估算模型求解,涉及信息包括:铰链及支耳的空间位置(固定安装位置)、导程、减速比、速度与力矩曲线、安全裕量。部件层向下传递给零件层的信息利用部件设计模型求解,涉及信息包括:部件类型、空间尺寸限制、惯量、控制/驱动方式、载波频率、最大尖峰电流。零件层经过部件性能仿真模型解算,向部件层反馈信息包括:电阻、电感、力矩系数、刚度、间隙、摩擦系数、几何尺寸、承力极限、模态、高低温极限。部件层经过产品性能仿真模型解算,向产品层反馈信息包括:电机功率、母线电压、控制律、各部件效率、各部件损耗及各部件FMEA分析。产品层经过系统性能评估模型解算,向总体反馈产品的动态性能、效率、环境适应性、体积/质量。若这些性能无法满足要求,则需要利用设计优化方法对设计进行优化,甚至推倒该方案重新设计。

图3 航天机电伺服系统模块化设计数据传递V字流程图
3 模块化集成设计优化实例
以某航天机电伺服系统产品设计优化为例,说明本文所提模块化设计与优化方法的应用效果。该设计优化问题可描述为:在不增加现有机电伺服系统产品质量的前提下,使产品的动态性能提升10%,其数学模型可表示为式(1)。式中设计变量的含义、初值、设计空间、优化值如表1所示,式中目标及约束的含义及优化前后对比如表2所示。
选用Shi等[15]的SRBF-SVM优化算法对该优化问题进行空间搜索。从表1可以看出,优化后电机力矩系数增大了9.5%,电感提升了9.6%,转动惯量减少了4.4%,电机电阻、驱动器采样频率、机构导程、负载力臂基本不变。为匹配新设计方案,控制参数也有相应变化,其中位置环PP3的变化最大为23.7%,其次是电流环Piq的变化为19.5%,其余控制参数变化量不大于0.1%。
(1)
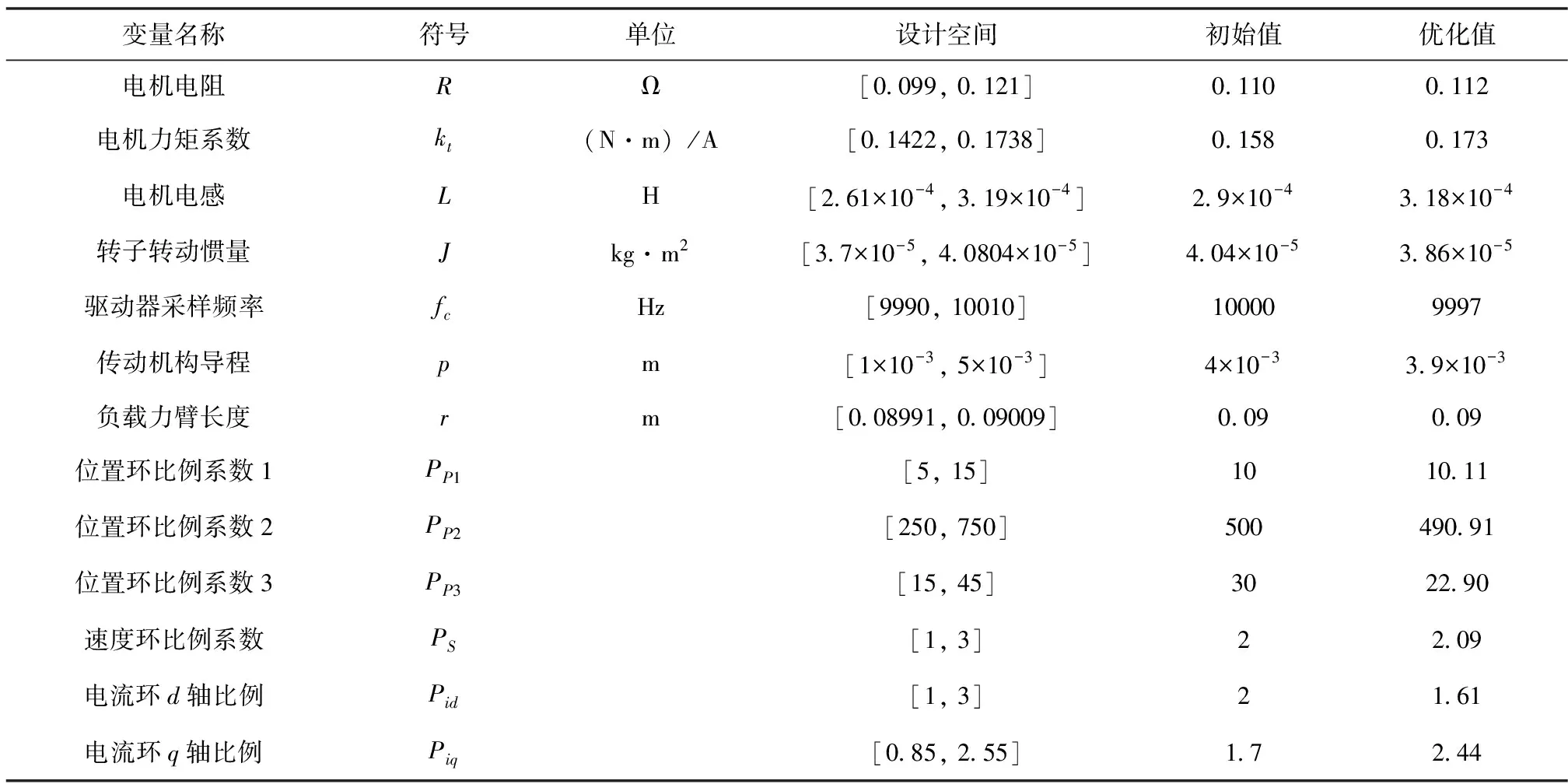
表1 优化前后设计变量对比
从表2可以看出,在暂态特性、位置特性和频率特性效率不低于初始值的约束下,优化后系统暂态特性上升时间缩短了11.4%,超调量减少了99.2%,名义位置增益改善了0.3%,位置回环宽度减少了97.0%,带宽提高了41.6%。
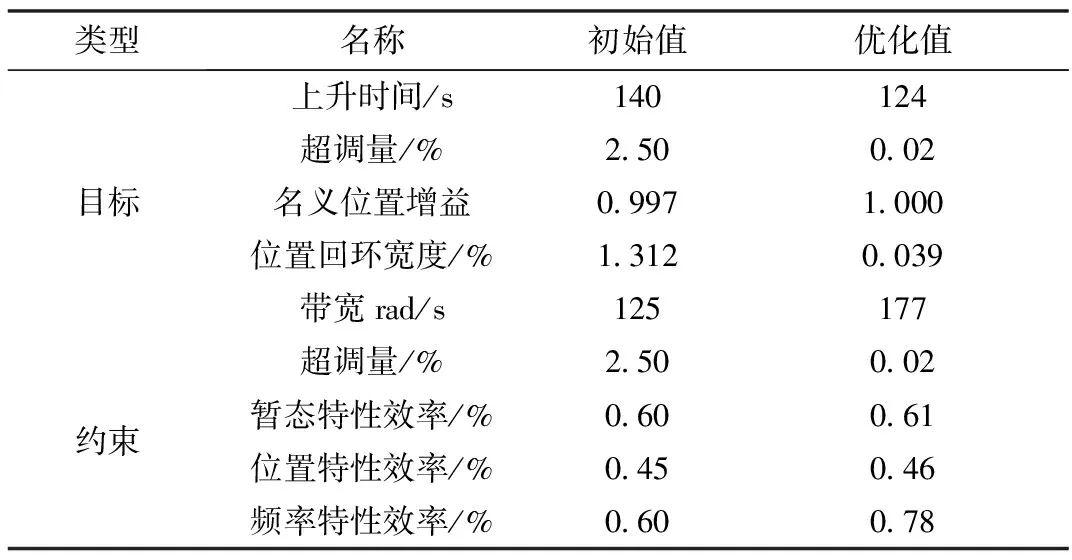
表2 优化前后目标及不等式约束对比
从图4暂态特性对比曲线可以看出,优化后的阶跃响应快速收敛到稳态值(振荡小),达到峰值点的时间比试验值快10ms,峰值减少了0.2°。从图5频率特性对比曲线可以看出,优化后频率曲线较好地体现了航天机电伺服系统要求的低频小相差、高频快衰减特点,且带宽从125rad/s提高到了177rad/s,虽然在90rad/s出现了谐振峰(峰值为2.199dB),但其值小于3dB的指标要求。
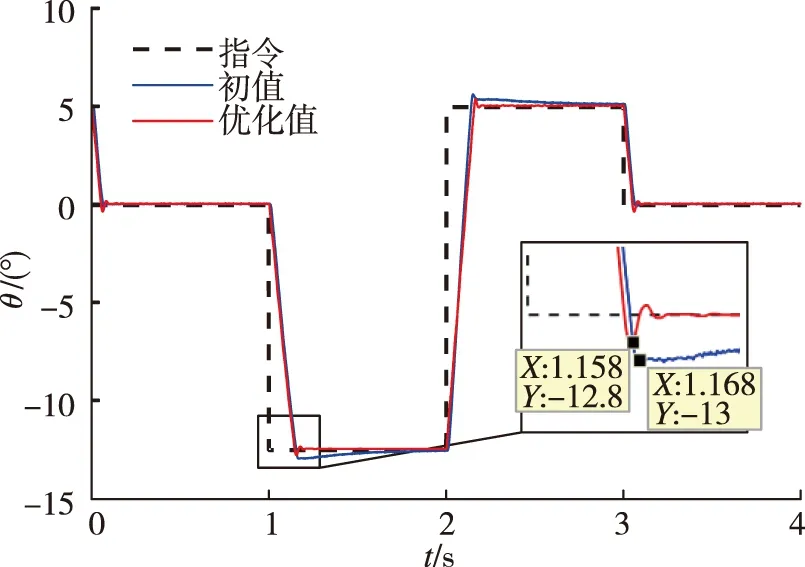
图4 优化前后暂态特性对比
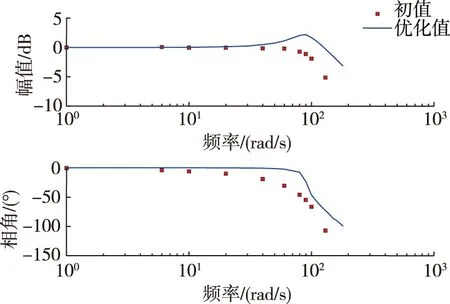
图5 优化前后频率特性对比
4 结论
与传统串行设计相比,本文所建立的模块化航天机电伺服系统多学科集成设计与优化方法将系统按产品层、部件层和零件层进行了分层梳理,给出了设计参数与性能指标的映射关系,变传统串行设计为V字设计,实现了30多类设计参数、5种模型的组合搭配及自动化迭代寻优。利用本文方法对传统串行设计的产品进行改进,以不增加现有产品质量为前提,对电机、传动机构和控制参数进行自动寻优结果表明,仅改变了电机的力矩系数、电感、转动惯量3个参数,并将控制参数位置环PP3和电流环Piq进行了适当调整,产品的动态性能即提升了10%,证明所提方法能很好地表示航天机电伺服系统内部的多学科耦合现象,借助智能优化算法较易获得产品改善,对提升航天伺服产品的设计水平,加快设计效率大有裨益。
