地铁保护区内无人机测绘数据处理的算法研究
2019-12-04吴廷
吴 廷
(上海市建筑科学研究院,上海 200032)
0 引言
地铁隧道结构在服役过程中,受材料老化、列车振动和周边环境等多种内外因素的影响,在运营期会出现结构病害[1-4],发生结构变形[5-6].内在因素如材料老化、列车振动等为无法避免的因素,而周边环境的影响则完全可以提前发现并进行有效处理.因此,为了运营期地铁隧道结构的健康,控制地铁隧道的变形和病害,保护区巡查工作十分重要且必不可少.目前,国内地铁保护区巡查主要采用人工巡查,通过现场逐一检查、拍照、纸质记录等方式发现和处理违法项目[7].地铁运营监护管理部门,每年要花费大量的人力、物力来进行地铁沿线的检查、检测及监护工作,人员投入大、成本高、效率低[8].如何快速、高效地解决现有巡查存在的地铁保护区巡查范围广、人工巡查工作量大的问题十分棘手,而无人机航空摄影测量技术为解决该难题提供了技术支持[9-11].借助无人机航测技术可实现地铁保护区沿线地表标高变化情况、新增施工项目情况、地表堆载方量变化情况的巡查,量化评估环境影响.
1 无人机测绘技术概述
无人机航空摄影测量技术[12-14]是利用先进的无人驾驶飞机搭载相机,结合航空摄影测量技术、通讯技术、GPS差分定位技术实现地理空间信息采集的技术.目前,无人机的设计越来越小巧轻便、机动灵活,飞行的安全性也越来越高,人工干预少、自动化程度高,外业飞行时起降落点对场地要求不高,航拍时间短,成果质量高[15-18].无人机运营巡查在地铁保护区巡查项目的应用有效地代替了传统巡查手段的不准确性、不及时性.使用无人机对地铁线路进行巡查,主要有以下几个优点,一是不存在巡查遗漏现象,可以对巡查人员识别不准确、复杂地形区域进行全覆盖巡查;二是大大提高了巡查的作业效率,且成果精度高,真正能够做到“高效快速、精细准确”;三是可以留存数字化成果,对地铁保护区内建设项目、作业活动及周边环境变化等进行数字化电子台账监管,并通过数据处理和影像对比自动检测识别地铁保护区内新增的作业活动,及时发现和制止影响轨道交通建设及运营安全的违法作业活动.
2 无人机测绘作业指导
无人机测绘分为外业和内业两部分,外业测绘的质量影响着后期内业数据处理的质量.城市地铁多为狭长型的线路工程,无人机在外业测绘时需结合地铁保护区具体的线路走向、地铁沿线的地形地貌情况以及地铁保护区巡查工作的内容合理规划航线.无人机在轨道交通线路上方进行空三测量时,需时刻关注无人机的位置及安全,防止飞机突然掉落发生安全事故.无人机测绘及安全巡查的工作流程主要包括明确保护区巡查任务,收集相关地铁及地形资料,现场踏勘,项目航线设计,现场像控点布设,空中三角测量,飞行数据获取,航摄数据检查,地形数据采集,外业调绘成图,内业数据处理,生成正射影像,高程处理分析,生成最终成果[6,19-20].以某2000 m×400 m的地铁区间为例,探讨地铁保护区内无人机巡查测绘的作业路径.
2.1 像控点布设
像片控制点是无人机测绘内业数据处理的依据,也是三维点云数据统一至城市独立坐标,进行坐标转换的基准,同时也是多期无人机测绘数据精确比对的关键,因此像控点的布设至关重要.而对于狭长型的地铁线路,需采用类似标准航带区域网布点方式.为了提高控制网精度,外业布设时不要敷设在一条直线上,像控点应相互交叉成导线状(如图1所示),均匀布设在地铁沿线无遮挡位置.对有堆土或者有施工作业的区域可适当加密布设,车站和线路中间位置一定要布设像控点.另外,在高程变化大的地方适当加密,可提高高程定位精度.提前在测区内布设10以上的平高点和高程点,用GPS采集好每个像控点的三维坐标.

图1 狭长型地铁线路像控点网形设计
2.2 航线规划设计
现场踏勘确定测区内建(构)筑物最高高度,是否存在机场、军事设施等禁飞区域,利用无线电探测仪检查地铁线路沿线是否存在电磁波干扰.在气候条件允许的情况下,进行外业数据采集.采用专门的飞控软件进行航线规划设计,设置像片的航向重叠度80%,旁向重叠度65%,飞行高度80 m,将地铁线路划分成4~5个测段分别进行飞行,经规划设计得到某一测段的飞行线路如图2.

图2 航线规划设计图
2.3 空中三角测量
2.3.1 起飞及返航
选取通视条件良好、场地平整区域起飞.飞机起飞前需确认地面风速和风向是否适合起飞,如果不确定可借助风力测量仪.参考附近最高建筑物,设置好飞机合适的返航高度,让无人机更安全的自动返航.检查GPS信号情况,保证足够的卫星信号强度(至少6颗以上),且必须在GPS模式下,检查图传数传通讯情况,待无人机刷新返航点后起飞,确保飞机能够自动返航.
2.3.2 跟踪及测量
无人机在拍摄测绘作业时,操控员应时刻跟踪飞机的位置,确保飞机沿预设路径安全飞行.如遇气象条件突变等特殊情况,按应急预案采取措施(临时变更飞行路径、择机降落)防止坠机.
2.4 数据处理
整理外业拍摄的原始数据,主要包括影像数据、POS数据以及像控点数据,确认原始数据的完整性,检查获取的影像中有无质量不合格的照片(如图3).同时查看POS数据文件,主要检查航带变化处的相片号,防止POS数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整.原始数据检查无误后,采用专业的无人机数据处理商业软件进行数据解析.解析步骤主要包括:数据预处理、刺像控点、镶嵌图编辑、正射影像成果图编辑、正射影像成果数据导出.根据生成的正射影像数据,结合地铁保护区的实际范围和特殊要求,采用自主研发的“无人机测绘及安全巡查系统”,实现多期地铁巡查数据的对比,自动解算提取高程差异较大的区域,高效便捷.

图3 无人机航拍影像
3 地铁保护区内无人机飞行数据处理算法研究
无人机测绘及安全巡查系统数据处理中,有三个关键问题需要解决,一、地铁隧道为地下工程,航测的成果中无法识别地铁隧道的具体位置,因此需要设计算法提取隧道边线;二、航测的成果通常会比地铁保护区范围广,而我们关注的是地铁保护区范围内地形地貌高程的变化,因此需要设计算法提取地铁保护区的边线;三、对于多期的航测数据,需要软件自动分析每两期点云数据之间地表高程的变化,因此需要设计算法对同一位置、不同日期下的地表点高程进行自动对比计算.现将上述三个关键问题的解决算法说明如下:
3.1 地铁隧道边线提取算法
如图4所示.
第一步:根据整理好的地铁隧道轴线数据识别上(下)行线的前两个点:1号点和2号点;
第二步:通过直线方程公式确定线段12的直线方程:
第三步:根据直线几何关系反算直线方程lL1R和2L2R;
第四步:根据已知隧道半径r计算得出点lL、1R、2L、2R的坐标;
第五步:将lL和2L连线、1R和2R连线得到1号点和2号点的隧道边线;
第六步:按照上述步骤,依次计算提取2号点和3号点、3号点和4号点,直至循环至最后一点,得到隧道边线.

图4 地铁隧道边线提取算法示意图
3.2 地铁保护区边线提取算法
如图5所示.
第一步:根据4.1隧道边线提取算法,按照提前预设的隧道保护区直径值,得到隧道上行线保护区边线点S1L和S1R、隧道下行线保护区边线点X1L和X1R;
第二步:以此计算这四个点S1L、S1R、X1L、X1R的距离,依次判断距离大小,选择距离最大的两点X1L、S1R作为地铁保护区边线最外围的点;
第三步:重复上述步骤,直至循环至最后一点,得到保护区边线.

图5 地铁保护区边线提取算法示意图
3.3 地表点高差计算
高差对比核心算法为:相近坐标点最小距离计算算法.现介绍高差对比算法如图6.
第一步:选择基准面点云和对比面点云;
第二步:对于对比面中任意一点1号点,判断基准面中与之平面坐标最相近的两点2号点和3号点.需要说明的是,在平面中,对比面中的1号点到基准面的真实距离为1号点至线段23的垂直距离.
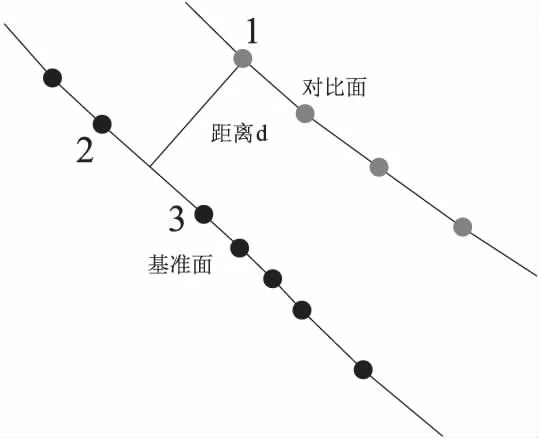
图6 平面点到线段之间的距离计算示意图
第三步:如图7所示,空间关系中,计算对比面中的点P至基准面的垂直距离,距离PP′为最终真实距离.

图7 空间点到平面之间的距离计算示意图
第四步:遍历所有点,直至循环至最后一点,得到距离计算对比数据.
4 案例验证
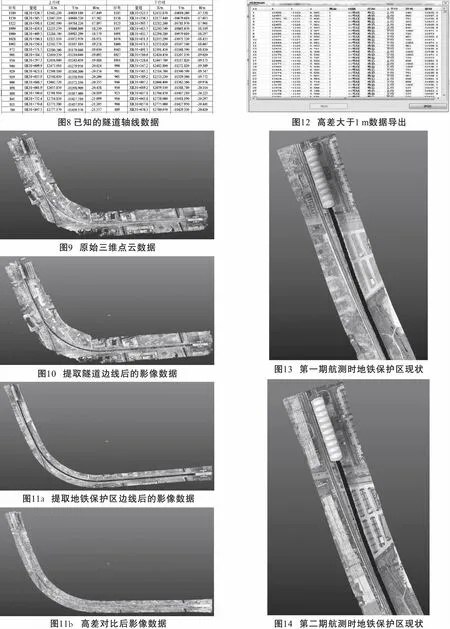
以某2 000 m×400 m的地铁区间为例,通过商业软件处理好后生成.las格式的三维点云数据.通过“无人机测绘及安全巡查系统”,打开已知的隧道轴线数据和三维点云数据(如图8所示),根据3.1的算法自动计算提取得到隧道边线(对比图9和图10可发现,图10中间黑色线条为自动计算生成的地铁隧道),再根据3.2的算法自动剔除保护区外的三维点云数据(对比图10和图11a可发现,地铁保护区范围线外的影像数据已被剔除),最后根据3.3的算法将两期点云数据进行自动对比,计算得到两次变化高差>1 m的区域(如图11b,红色区域为两次高差大于1 m的位置),输出对应的高差大于1 m数据(如图12),用来对地铁隧道结构的变形进行针对性分析.再打开两期的点云数据,可以发现高差变化较大区域为高架施工区域(对比图13和图14),地铁监护管理人员可对该施工项目进行规范性管控,以此来控制地铁结构的变形和病害的发生,方便、高效、快捷、准确,且有据可循.借助本系统,可实现多期地铁巡护数据的对比,自动解算提取高程差异较大的区域,高效便捷,大大节省了人力物力,为地铁保护区线路巡护、检查及监护工作带来了便利.
5 结语
本文以地铁保护区安全巡视为背景,介绍了无人机测绘在该领域的优势,并总结了无人机外业作业的关键的控制措施.自主研发了一套“无人机测绘及安全巡查系统”,讲述了系统内自动数据处理时的三个关键算法,通过实际案例验证了算法的正确性及系统的可靠性、便捷性,为国内地铁保护区安全巡查的应用提供了有利的技术支持,具有一定的参考价值.但目前航空管制较为严格,采用无人机开展地铁保护区巡查缺乏一定的制度支持,存在一定的作业风险.