多相可控整流控制策略的仿真与研究
2019-12-04龚健,李鹏,张彦
龚 健,李 鹏,张 彦
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
多相永磁同步整流发电机因其功率密度高、功率因数高、直流供电容量大、可靠性高,广泛应用于船舶电力系统中[1]。发电时带动发电机转动的发动机转速会有波动,船上用电设备的状态也在变化,当发动机转速或负载发生变化时,需要研究的多相可控整流技术能够提供高质量的500 V直流电压。
本文研究的双三相永磁同步发电机两套绕组间具有强耦合且电角度互差30°,建立该电机基于双d-q变换的解耦模型,推广三相电机的矢量控制到双三相电机中,确定双三相永磁同步发电机可控整流的恒压控制策略[2-4]。本文的多相可控整流技术研究对于船舶电力系统的容量扩大、可靠性提升具有一定的意义。
1 解耦数学模型及控制策略
1.1 基于双d-q变换的数学模型
为实现解耦控制,将双三相发电机的两套绕组在相差30°的2个同步旋转坐标下分别进行Clarke-Park变换,如图1所示。
构造出六阶变换矩阵P如下:

图1 双三相PMSG的双d-q坐标变换
经过坐标变换得到基于双d-q变换的电压方程和磁链方程:
(2)
(3)
式中:ω为同步电角频率,单位为rad/s;Ld,Lq为直轴、交轴电感,单位为H;Ldd,Lqq为2套绕组间在双d-q坐标系下的互感,单位为H。
电磁转矩方程为:
Te=1.5pn[(Ldd-Lqq)(id1+id2)·
(iq1+iq2)+(iq1+iq2)ψf]
(4)
磁链方程中的Ldd、Lqq表示2套三相绕组的d轴和q轴磁链之间存在耦合。
当2套绕组使用相同的PI控制器参数时,有:
id1=id2,iq1=iq2
(5)
此时磁链方程可以写为:
(6)
综上,当2套绕组使用相同的PI控制器参数时,双三相永磁同步电机基于双d-q变换模型是完全解耦的。
1.2 可控整流的控制策略
恒压发电时,发动机带着发电机转动发电,此时转速不受控制,会有一定范围的波动,在转速变化以及负载变化的工况下,直流侧的输出功率也会变化,需要控制直流侧的母线输出电压恒定不变,针对基于双d-q变换的解耦模型,采取id=0的双闭环恒压控制策略(1个电压外环、4个电流内环),使直流侧的母线输出电压恒定不变,采集直流侧母线电压作为电压外环的反馈量,电流环为id=0控制,q轴电流给定值为电压PI调节器的输出,如图2。
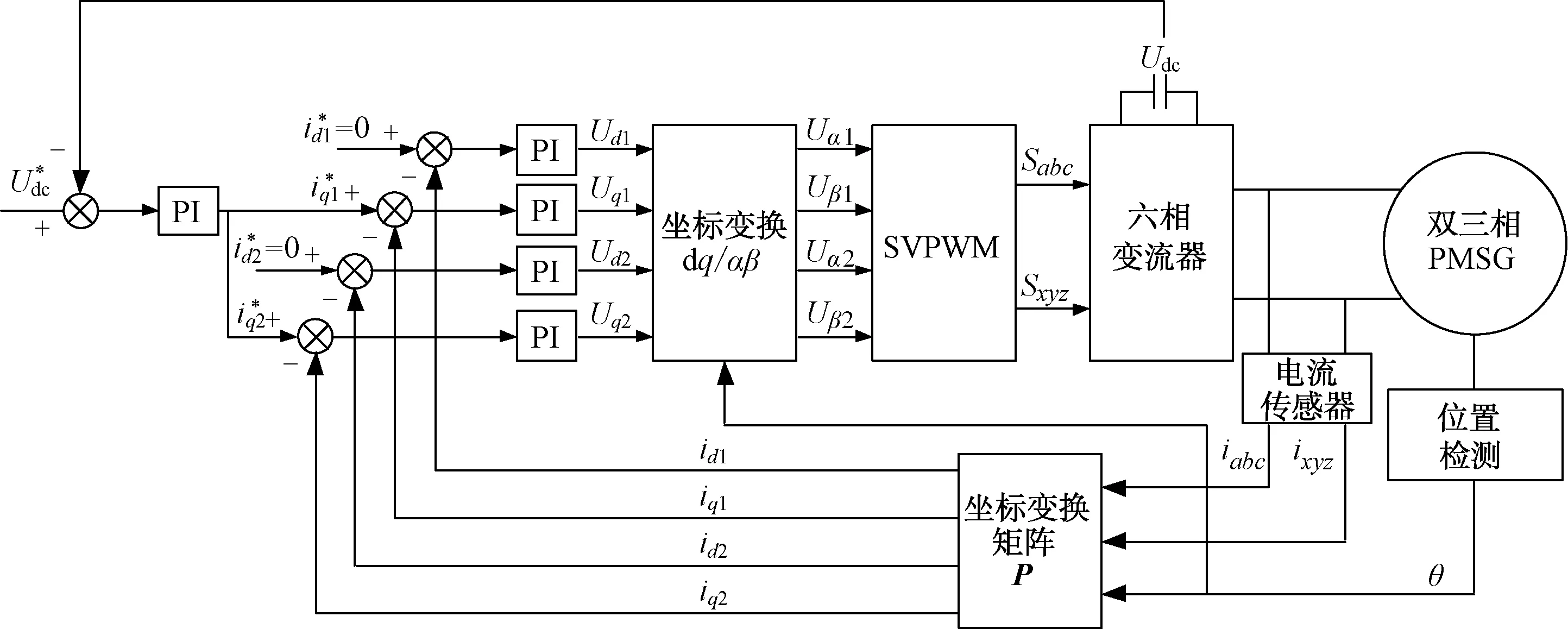
图2 基于双d-q变换模型的双三相PMSM发电矢量控制
2 可控整流仿真系统的搭建
2.1 双三相永磁同步发电机的仿真模型
本文研究的发电机参数如表1所示。

表1 双三相发电机主要参数
基于1.1中的数学模型,变换得到该电机的状态方程:
(7)
式中:B1=
利用Matlab的Simulink软件,根据式(4)、式(7)搭建发电机的仿真模型,包括坐标变换模块、电气模块和机械运动模块,如图3所示。
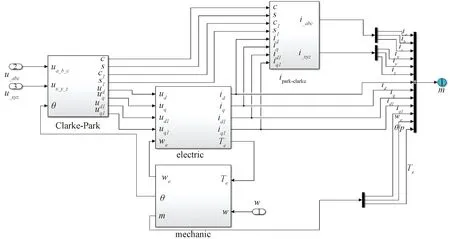
图3 基于双d-q变换模型的双三相永磁同步发电机的Simulink仿真模型
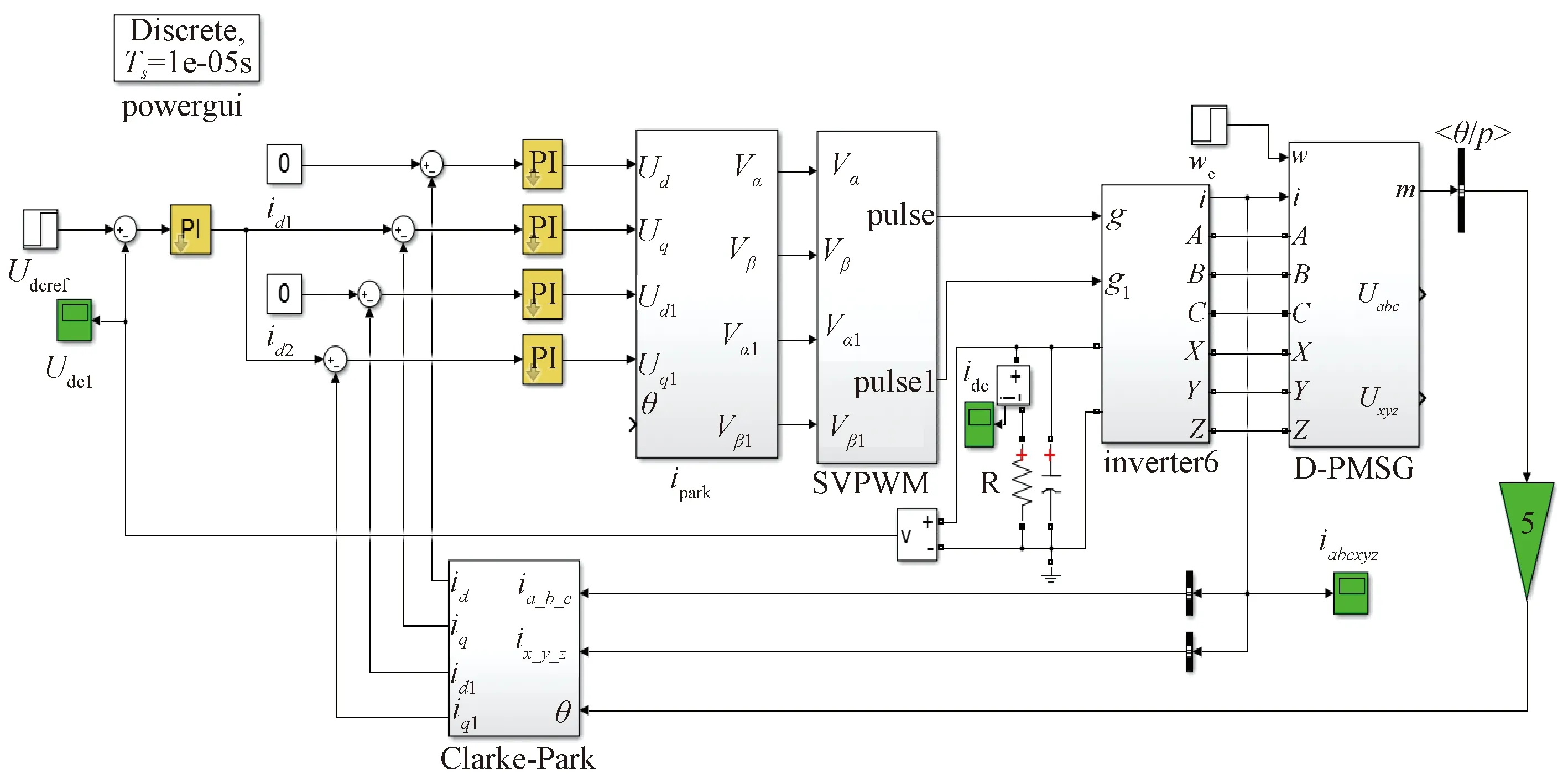
图4 可控整流控制系统的仿真模型
2.2 可控整流控制系统的仿真模型
系统仿真模型如图4,以功率电阻作为直流侧的负载,本文分别在直流母线电压变化工况、发电机转速变化工况和直流侧负载变化工况进行系统的可控整流仿真分析。
3 可控整流的仿真与分析
3.1 变电压工况的仿真分析
当供电系统所需的直流电压发生改变时,需要系统能快速反应并稳定在新的给定值。使用Simulink模拟此种工况,在仿真中保持发电机转速为5 500 rpm不变,直流侧500 Ω电阻负载不变,给定直流母线电压为400 V,1 s时给定值提升为500 V,得到仿真结果如图5所示。
图5(a)表明仿真开始后约经过0.5 s直流母线电压达到稳定,1 s时改变电压给定值,经过约0.2 s达到新的稳定状态,且纹波很小。图5(b)为直流母线电压为500 V时的六相电流,正弦对称且相应各相互差30°。
综上,本文设计的可控整流控制系统在给定直流电压发生变化时有较好的动稳态特性,能够在不同给定电压下得到所需的稳定直流电压,而且电压纹波较小。
3.2 变转速工况的仿真分析
在发电时是由发动机带动双三相永磁同步发电机转动发电,由于没有控制发动机的转速,所以发电运行过程中发动机转速不可避免地有一定幅度的波动,此时仍然需要保持直流母线电压稳定不变。在仿真中,电压外环给定值为500 V,直流侧500 Ω电阻负载不变,在1 s时将发电机的转速从5 500 rpm提升至6 000 rpm,以此模拟发电机转速变化的工况,得到仿真波形如图6。
从图6(a)可以看出,发电机转速在1 s时刻发生变化时,直流侧母线电压经过短暂波动后能保持稳定在500 V,恢复时间约为0.1 s,波动幅度约为15 V。图6(b)为转速6 000 rpm时的六相电流波形图,转速变化后电流依然能保持正弦且对应各相相差30°。
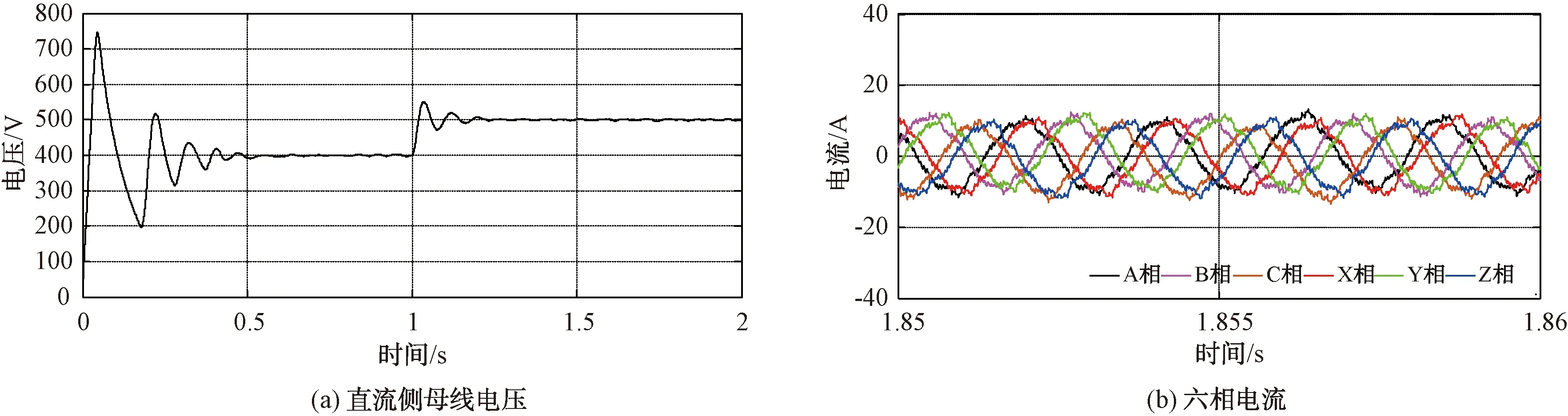
图5 系统变输出电压工况仿真图
因此,本文设计的双三相永磁同步可控整流控制系统在转速变化的工况下有良好的动静态性能,能快速恢复并保持直流母线电压稳定在500 V。
3.3 变负载工况的仿真分析
发电过程中,负载会因船上用电运行状况而发生改变,在仿真中模拟发电机系统的负载变化情况,直流侧接可变的功率电阻作为负载,在1 s时将电阻从500 Ω变成250 Ω,转速保持在5 500 rpm不变,仿真结果如图7所示。
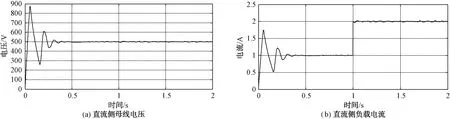
图7 系统变负载工况仿真图
图7(a)中负载在1 s时变化后,直流母线电压能维持500 V不变。图7(b)中直流侧负载电流从1 A变为2 A,输出功率从500 W增加为1 000 W,带载能力提高了1倍。
综上,该可控整流控制系统在负载变化的工况下直流母线输出电压依旧能够保持稳定不变,拥有良好的动静态性能。
4 结束语
本文利用Matlab/Simulink搭建双三相永磁同步发电机控制系统的仿真模型,分别在母线电压变化、发电机转速变化和直流负载变化的工况下,模拟发电机变电压、变转速、变负载运行。仿真结果表明:直流侧母线电压能保持稳定,表明该可控整流控制系统的可行性,且具有良好的静动态性能。