利用双极化Sentinel-1数据监测城市地面沉降
——以上海市为例
2019-12-03熊佳诚聂运菊李永飞
熊佳诚,聂运菊,罗 跃,李永飞
(东华理工大学测绘工程学院,江西 南昌 330013)
地面沉降是由人类活动和自然因素导致地面高程降低的复杂地质环境问题,主要发生在城市、矿区等人类活动频繁的区域。国内很多城市和地区都发生过不同程度的地面沉降,如北京、西安、成都等[1-3]。位于长江入海口的上海,由于特殊的地质环境与频繁的人类活动,极易发生地面沉降。文献[4—7]基于合成孔径雷达干涉(interferometric synthetic aperture radar,InSAR)技术对上海市地面沉降进行了监测,结果显示上海市内多个地区出现地面沉降现象。
在InSAR中,雷达天线通过向地面发射电磁波并接收由地面反射的回波得到地面信息。极化作为矢量波共有的一种性质,反映了电磁波的矢量特性[8],在获取地面信息中占有重要地位。同一地区,不同极化方式得到的遥感影像包含的地面信息会有差异;不同极化信号对不同土地类型的敏感度也会有差异,这些差异在一定程度上将影响监测结果的有效性。多数学者在监测地面沉降时只利用单极化数据进行分析,并未考虑不同极化方式对所得研究区地面信息差异的影响。
针对以上问题,本文利用Sentinel-1双极化数据对上海市城区地面沉降进行监测,得到2017—2018年间上海市城区地面沉降速率与分布,分析两种极化方式在监测城市地面沉降中的差异,并与水准数据进行比较,得到适合城市地面沉降监测的极化方式,为今后监测城市地面沉降的极化数据准备提供选择依据。
1 研究方法与数据准备
1.1 研究方法
1.1.1 短基线集技术
传统的地面沉降监测方法耗费人力、物力、财力,且工作量大,速度慢,难以保证监测结果的时效性。InSAR技术凭借低成本、效率高、范围大等优点,被广泛应用于监测地面沉降。基于InSAR技术的短基线集(small baseline subset,SBAS)技术[9]克服了基线失相干[10]的影响,在提高精度的同时延长了监测的时间范围是目前监测城市、矿区等地面沉降的主要方法。
短基线集技术通过结合已有影像数据,对所有干涉对进行差分干涉,通过查看每组相干系数图的相干性移除低相干对,使用GCP控制点去除相位坡道;并根据SVD法反演估算形变速率[11],去除残余地形;最终将所有生成结果进行地理编码,得到研究区的形变速率与分布。
1.1.2 极化方式
卫星雷达天线在发射与接收电磁波信号的过程中,若其电磁波在水平方向上振动,称为水平极化(H);若在垂直方向上振动,称为垂直极化(V)(如图1所示)。因此,雷达遥感系统通常包含4种极化方式[12]:信号水平发射水平接收(HH)、信号垂直发射垂直接收(VV)、信号水平发射垂直接收(HV)、信号垂直发射水平接收(VH)。前两者为同向极化,后两者为异向极化。
1.2 数据准备
本文以Sentinel-1A宽幅干涉模式(interferometric wide swath,IW)双极化(VV,VH)数据为数据源。Sentinel-1A卫星搭载C波段合成孔径雷达[13],有4种成像模式:宽幅干涉模式、条带模式(strip map mode,SM)、超宽幅模式(extra wide swath,EW)和波模式(wave mode,WV)。4种成像模式的具体参数见表1。IW与EW模式采用步进的条带扫描方式(terrain observation with progressive scans SAR,TOPSAR)[14]将3个子条带合并成一景影像,能够在保证分辨率的前提下提高对地面的覆盖范围,解决了传统ScanSAR的图像不均匀问题[15],是陆地覆盖区域的主要成像模式。除影像数据外,还包括精密定轨星历数据和SRTM4DEM数据,分辨率为5 m×5 m。
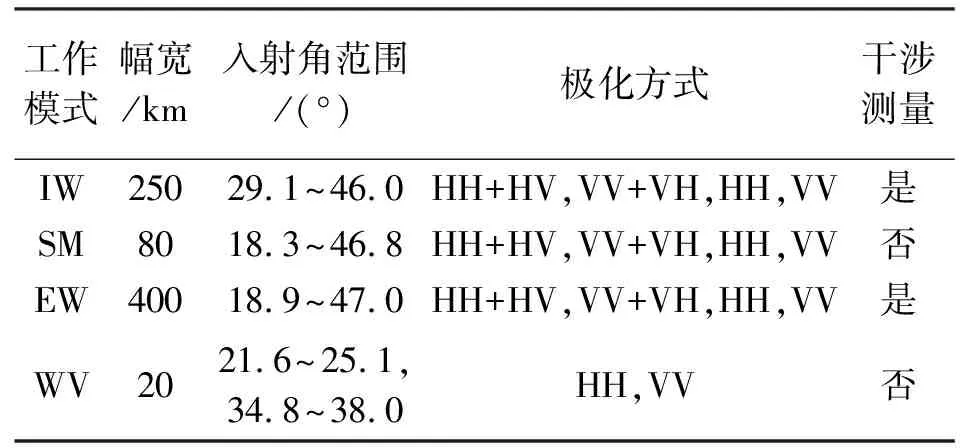
表1 4种成像模式基本参数
研究区影像覆盖范围与区域放大图如图2所示,中心经纬度分别为31°14′N和121°27′E,时间跨度为2017年8月—2018年8月。区域放大图中叠加有用于验证的10个水准点的分布情况。表2为两种极化数据的基本参数,从表2可以发现时间基线与空间基线不受极化方式的影响,存在差异的原因与数据包含的地面信息有关。
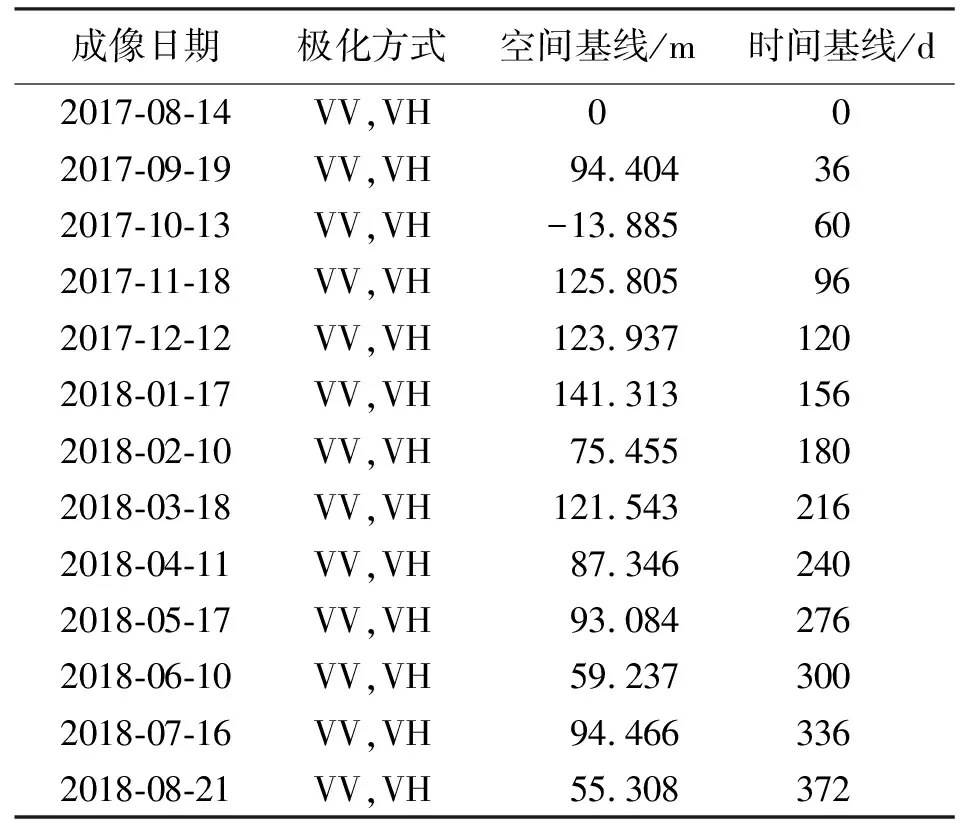
表2 影像数据基本参数
2 双极化数据地面沉降监测结果与分析
2.1 地面沉降现状分析
对两组数据分别进行短基线集处理,获得上海市城区2017年8月—2018年8月地面沉降速率图(如图3、图4所示)。从图中可以看出,研究区在监测时段内VV极化数据年平均沉降速率主要集中在-5.68~5.45 mm/a,最大年平均沉降速率为-31.67 mm/a;VH极化数据年平均沉降速率集中在-6.73~7.32 mm/a,最大年平均沉降速率为-31.32 mm/a。两种监测结果均显示,研究区地面在监测时段内整体呈现小幅沉降,部分区域出现较为严重的地面沉降及小幅度的地面抬升。
从发生地面沉降与抬升的区域可以看出,两种监测结果显示的范围大致相同(如图5所示)。在沉降区中,虹桥机场周边沉降区面积最大,约为52.9 km2; 北郊站周边沉降区面积约为22.8 km2; 白杨路周边居民区沉降面积约为6.9 km2。在抬升区中,上海南站周边抬升区面积最大,约为48.6 km2;静安区政府周边抬升区面积约为6.30 km2;浦东新区政府东北方向抬升区面积约为9.52 km2。
2.2 监测结果差异分析
尽管两种监测结果在沉降趋势与形变区范围上大致相同,但整体沉降速率仍有偏差。图6为4个监测点在两种监测结果中各自的沉降量时间序列变化情况。从图中可以看出,4个监测点在监测时段内沉降变化趋势大致相同,但在各个监测时刻上的沉降量不同。同时,从图7中可以看出,与VV极化数据相比,VH极化数据监测结果存在大量空值,在图中表现出监测结果的区域整体性不如VV极化数据。研究区内除黄浦江和部分植被覆盖区外,主要为高相干性的人工建筑物,监测结果不应出现大范围空值。在短基线集技术中,每组干涉对分别进行差分干涉处理,生成的相干系数图、解缠图作为下一步移除相位坡道并得到最终结果的基础数据。因此,对两种极化数据监测结果的差异分析主要集中在对相干系数图和解缠图的差异分析。
通过提取两种极化数据各78对干涉对相干系数,从图中的相干值分布(如图8所示)可以发现,VV干涉对相干性总体优于VH干涉对。查看每幅干涉图的相干值,VV干涉对均高于VH干涉对,平均每幅相干值高出0.059。在相干性较高的城市区域内VH极化数据相干性整体偏低,会导致监测结果出现偏差。
监测结果中点值是否为空取决于解缠后该点像素是否有效。将78对干涉对按照主影像序号分为12组,从提取12组干涉对两次解缠后的有效像素数平均值(如图9所示)可以发现,VH极化数据干涉处理后的有效像素数明显少于VV极化数据。在一次解缠与二次解缠后,VV解缠图有效像素数比VH解缠图平均每幅高出337 071、338 887个。VH极化数据有效像素数过少是导致监测结果出现大量空值的主要原因。
2.3 精度分析
为了评价两种监测结果的质量,将2007—2012年上海市水准数据与本次研究结果进行分析。由于监测点位置与水准点位置通常不一样, 为了与水准数据进行对比,基于最邻近监测点结果估计垂直向形变速率并与水准数据进行比较。表3为两种监测结果与水准数据的对比情况,从表3可以发现,与VH极化数据相比,VV极化数据与水准数据的偏差值更稳定。计算两种极化数据与水准数据的均方根误差,得到VV极化数据均方根误差为5.85,VH极化数据均方根误差为7.60,说明了VV极化数据监测结果比VH极化数据更可靠。
3 结 语
本文针对双极化数据监测城市地面沉降,采用13幅2017年8月—2018年8月Sentinel-1A VV、VH极化数据对上海市城区地面沉降进行监测,得到基于两种极化数据的监测结果。通过分析两种监测结果在研究区监测时段内的沉降速率、沉降分布、时序变化,以及在差分干涉过程中生成的相干系数图与解缠图,得出两种极化数据在城市地面沉降监测中的区别。结果表明,虽然两种监测结果均显示研究区地面存在部分沉降与抬升的形变区,且形变区范围大致相同,但具体的沉降速率存在偏差,同时,VH极化数据监测结果存在大范围空值。在相干系数图的相干性与解缠图的有效像素数方面,VV极化数据干涉对均高于VH极化数据,VH干涉对有效像素数过少是导致监测结果出现大范围空值的主要原因。将两种监测结果与水准数据进行比较,VV极化数据监测结果与水准数据偏差更小。以上分析结果表明,VV极化数据相较于VH极化数据更适合应用于城市地面沉降监测。

表3 监测结果与水准数据沉降速率比较 mm/a