潜艇抗沉性及抗沉辅助决策系统研究综述
2019-12-03孙玉山马陈飞张国成吴新雨唐同泽
孙玉山,马陈飞,张国成,吴新雨,唐同泽
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
0 引 言
21世纪是海洋的世纪,潜艇因其具有独特的隐蔽性和突击力强、机动性好、自持力久等优势,在海战中扮演着重要的角色[1]。潜艇的抗沉性是其能在战争中取得胜利的关键因素之一,特别是近年随着计算机技术的发展,关于抗沉性的研究进入到了一个全新的领域,即辅助决策系统。本文重点分析了国内外潜艇抗沉性的方法以及辅助决策系统的研究现状。
1 潜艇抗沉性及常用抗沉方法
潜艇抗沉性是指潜艇抵抗海损事故危害的防沉和抗沉能力,是组成潜艇生命力的重要部分,也是潜艇能够在事故中存活下来的必要条件[2]。潜艇的抗沉性体现在潜艇的生命力上,总的来说包括2个方面,从广义角度来说包括损害前的规避能力以及发生损害后的抗损性等,从狭义角度说是潜艇抵制安全事故,最大限度保持潜艇航行性能的能力[3]。
潜艇的抗沉性代表了隔舱及与其相邻的主压载水舱破损进水后,仍然能保持一定的浮性、稳性而不沉的固有特性和安全漂浮、上浮下潜、潜行,甚至战斗的能力[4]。由于潜艇特殊的工作性质和恶劣的工作环境,其在航行过程中会产生各种海损事故和战斗损伤,它们会直接或间接地影响潜艇的生命力,使潜艇丧失正常航行的能力,更有甚者会导致潜艇坐沉海底,造成严重的安全事故[2],因此在设计建造过程中就应该提前考虑到潜艇抗沉性的要求。
潜艇在海上的工作状态可以分为水上和水下2种,而半潜可以视为2种状态的过渡状态[5],因此讨论潜艇的抗沉性应从水上抗沉性和水下抗沉性出发。目前,潜艇水上抗沉性的定义有多种不同的说法,其中较为主流的是潜艇处于水上正常状态时,在一定的“破损条件”下,仍具有足够的浮性、稳性而漂浮于水面、被拖带或独立航行(当机电等设备尚能满足航行要求时)的能力[4]。潜艇在刚开始发明出来投入使用时是以水上航行为主,经过这么多年的研究水上抗沉性已基本形成理论体系,并被应用于潜艇设计和实际使用中[2]。二战后,潜艇的设计有了很大的要求,为了提高潜艇的水动力性能和适应现代海战的发展,潜艇的线型、结构、贮备浮力占潜艇排水量的百分比有了变化,同时由于电子计算机技术的发展,反潜兵器的加强,使得现代潜艇都是以水下航行状态为主,并经常在大深度海区活动,因此潜艇水下抗沉性已越来越成为有关潜艇生命力的主要问题[2]。
早在20世纪60年代就有国外学者从潜艇的结构和制造的角度对抗沉性进行了分析,在70年代潜艇抗沉理论有了巨大的发展,逐渐提出了2种主流的抗沉方法,一种是利用潜艇储存的高压气对压载水箱进行吹除达到上浮的目的,另一种是在潜艇进水量不大的情况下,通过增加速度或者操适当舵角进行调整,使艇安全航行[6-7],除此之外还可以进行封舱、堵漏、主压载水舱排水等水下破损基本抗沉措施[8]。
2 潜艇抗沉辅助决策系统现状
破舱辅助决策就是当潜艇发生事故时,给潜艇上的指挥人员提供有用的信息,辅助指挥人员做出此时此刻相对正确的决策来帮助潜艇脱离险境,以实现抗沉成功[7]。当潜艇在水下航行发生安全事故时,指挥人员很难在那种紧张的情绪下快速、准确地做出判断,甚至可能会做出错误的判断,使后果更加严重。统计数据表明,从二战至今的大多数潜艇事故都是人为造成的,要是在事故发生之后做出准确的事故判断是可以避免的。
辅助决策系统最开始是用于船舶的,所以首先讨论船舶的破损辅助决策。国外最开始将计算机与人工智能应用于抗沉性研究的是美国的Ballast于1984年开发应用于FFG-30舰上的损管系统,该系统可以实时监控并分析舰船的浮态和稳性,针对各种情况,提供调整浮态的解决方案以供选择[9]。海军司令部1990年利用了船体特性程序(SHCP)的标准算法研发了FCCS(进水事故控制软件),能够实时记录舰船载荷,舰船损伤等信息,可以提供航行过程对稳性的影响性分析[10]。2004年,Graphics Research Corporation(GRC)公司开发了一种舰船稳性分析软件(Seagoing paramarine),可以通过舰船载况的改变,实时分析舰船的完整稳性,针对稳性的变化做出相应的调整,保证舰船的生命力[11]。2005年,Dongkon Lee[12]利用专家系统制定不同破损状态时的压舱策略,调整舰船的姿态来提高舰船的稳性和纵向强度来实现抗沉辅助决策。国外关于舰船辅助决策方面的研究已经趋于成熟,但是由于保密性等原因,公开发表的文献较少。
国内关于这方面的研究起步较晚,但近年来也取得了很大的进展。2001年程虹等[13]从浮态调整系统的组成及原理上探讨了试验舰船的浮态调整方法,该系统通过实验实时提供的数据,计算舰船稳性及油水消耗情况,最后结合实验给出调整措施,该浮态调整系统也可应用于其他舰船。在此项研究的基础上,利用液舱调整浮态的基本原理,又研究出一种自动生成舰船浮态调整方案的实时运算方法[14],解决了利用液舱进行浮态调整时遇到的问题。
2007年,马坤等[15]将计算机仿真技术应用到舰船完整稳性的计算当中,基于静力学基本原理,提出任意浮态下载况的实时计算方法,该方法得到液舱实时数据,通过计算机仿程序得到舰船浮态、稳性等,根据结果辅助操作人员进行调整。2010年胡丽芬等[16]研究开发了可以快速生成抗沉方案的计算方法,即MH法,根据抗沉性标板图的数据,不依赖优化数学模型,快速得到抗沉方案[17-18]。
2014年,胡丽芬等[19]通过改进的遗传算法,采用可用的抗沉舱来调整船舶浮态,以倾斜角和横倾角作为停止准则,计算液舱注水方案,对舰船的抗沉方案进行决策,适合于紧急情况下快速决策。2017年张维英等[20]为缩短舰船抗沉的反应时间,将逼近理想解排序法(TOPSIS)应用于辅助决策系统研究,除去已破损的舱室,以剩余稳性和浮态参数作为目标函数,最后输出船舶破损后的信息,抗沉舱的实施顺序以及实施方案后的效果,简单快捷且实用。
关于潜艇破舱辅助决策的研究是从21世纪初才开始明确提出的,国内最早用计算机仿真对潜艇抗沉性做出研究的是上海交通大学,利用计算机模拟潜艇水下运动规律,以039潜艇作为研究对象,模拟潜艇舱室进水事故,然后又进行了潜艇动力抗沉实艇实验,得出了相对可靠的潜艇动力抗沉规律,为以后潜艇抗沉性的更深一步研究积累了宝贵的经验。
国外最早开始进行潜艇破损辅助决策研究的是韩国的DONGGKON LEE,文章指出潜艇指挥员的指挥是基于个人经验、已有的数据以及可用的电子信息,但是在紧急的情况下,这种判断是不够的,所以创造一个可以自动做出反应并且给指挥员关于如何保持破损潜艇生命力建议的系统是至关重要的。这个智能辅助决策系统是利用专家系统实现的,并且主要设计了潜艇壳体破损和管路破损的决策树,当上述情况发生时系统根据条件做出指令决定潜艇是继续留在海上还是浮出海面[21]。
3 潜艇抗沉辅助决策系统设计
近些年来,由于人工智能和计算机仿真技术的发展,潜艇抗沉辅助决策系统的研究取得了许多的进展,虽然有许多理论还未能应用在实践中,但是相较以往已经有了巨大的突破。
3.1 当发生某种特定故障时的辅助决策系统
当潜艇发生安全事故时,许多因素都会导致潜艇坐沉海底,影响潜艇的生命力其中主要包括破损进水的时间、进水量的多少、破口的大小、潜艇破损舱室的位置,破损时潜艇的姿态以及深度等,有时为了研究的方便,通常选用对潜艇生命力威胁最大的因素来制定辅助决策系统。
有研究表明,当潜艇首部舱室破损时对潜艇生命力的影响是最大的,故设计了当首部舱室破损进水时才启动的辅助决策系统,此时根据要求和现实条件对抗沉方式进行选择,流程图如图1所示。
当潜艇发生故障时,对故障进行检查,如果不是首部舱室破损进水,则启动常规控制系统,反之则启动智能抗沉系统,根据潜艇破损时所处的环境及具体作战要求选择是保持当前深度还是应急浮出水面[22]。
此外,还有通过对潜艇破舱进水这一故障的实时监视管理,准确地获取潜艇水下破损进水量和进水位置信息,辅助潜艇指挥员采取及时有效的抗沉手段。潜艇破损进水实时监视管理系统由EKF(拓展卡尔曼滤波)、数据库、知识库、推理机和解释机制等5部分组成。传感器把潜艇的各种信息传给EKF,通过滤波算法,得出损失浮力、力矩的估计值,然后将各种值存放在数据库中以及算出损失浮力的力臂并存储,然后将信息传达给推理机,推理机把数据库中的事实与知识库中的规则前提事实进行匹配,若某规则匹配成功则满足条件,最后由解释机制向潜艇指挥员解释推理结果,以供指挥员做出抗沉决策[23-24]。
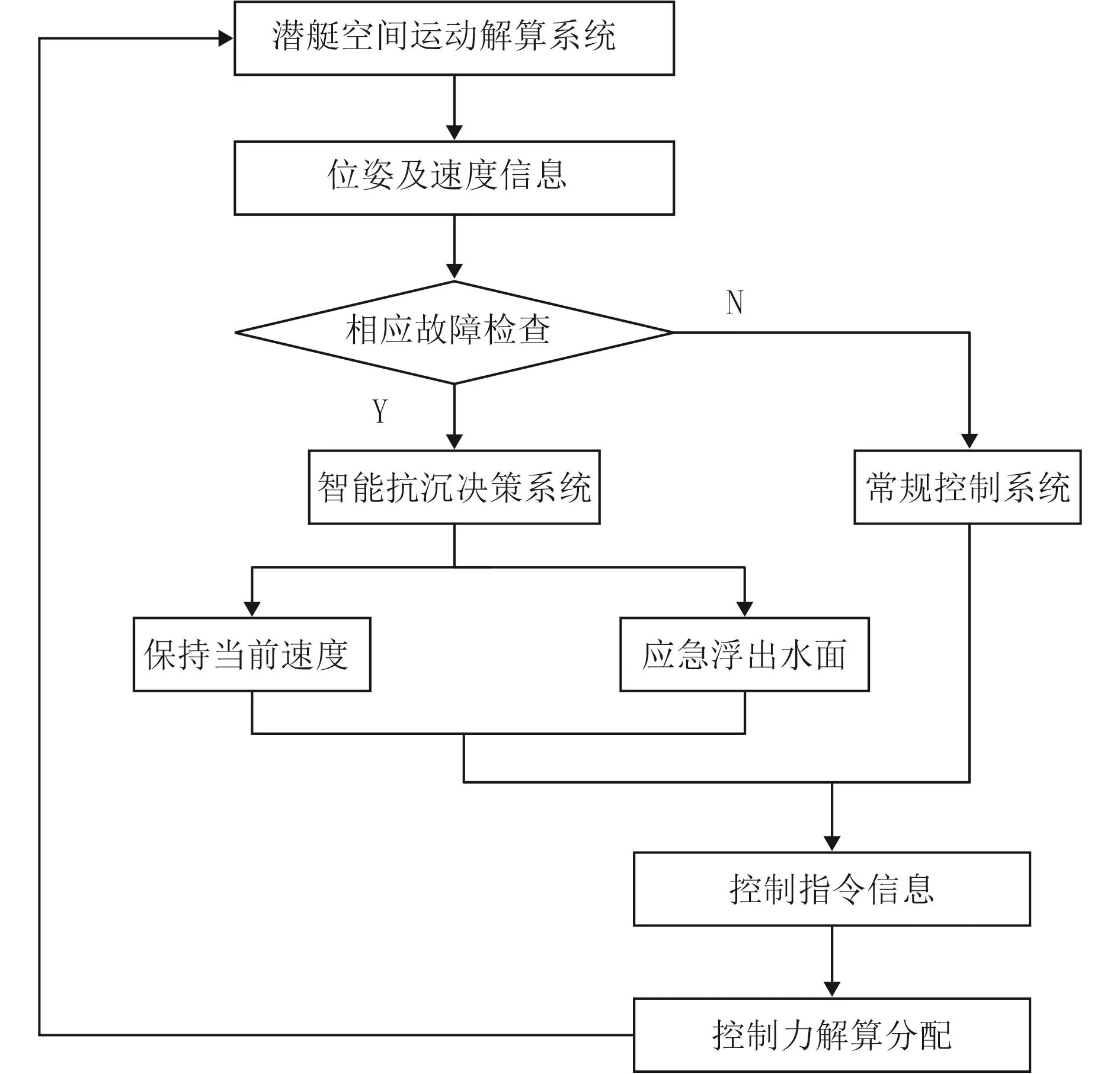
图1 潜艇控制流程图Fig.1 Chinese submarine no.418
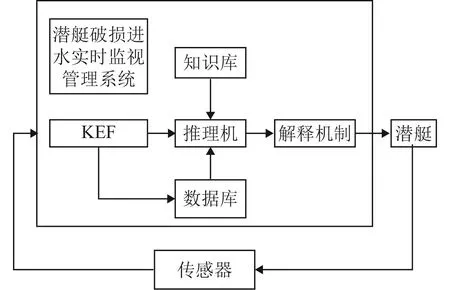
图2 潜艇破损进水实时监视管理系统结构图Fig.2 "KURSK" nuclear submarine
3.2 基于数学模型的辅助决策系统
根据潜艇不沉性理论,结合潜艇不沉性的数学模型,针对潜艇破损情况,建立辅助决策模型,给出包括浮态、稳性、破损舱室灌注时间等信息的计算方法,基于潜艇水下抗沉要求,提出高压气使用的优选方案和平衡艇体的步骤,对潜艇抗沉训练,战场抢修和生命力保障提供了信息支持。该系统采用模块化设计,有利于后续研究者在此基础上进一步拓展,抗沉辅助决策系统预先输入潜艇的基本参数以及数学模型曲线,然后针对可能发生的情况给出相应的缺省方案同时将潜艇破损后的浮态显示在界面上,最后将最优化的抗沉预案以及此预案下的抗沉结果以文字的形式显示在界面上[5]。
3.3 基于专家系统的辅助决策系统
专家系统是人工智能的重要组成部分,是一个具有大量的专门知识与经验的程序系统,此专家系统的组成来源一般是基于潜艇的设计资料、设计经验以及操纵者的经验等。有人研究应用专家系统理论对潜艇破损进水等危险情况下的决策进行建模,然后动态判断潜艇的实时状态,制定出对潜艇最有利的抗沉方案。决策系统是与潜艇模拟操纵系统连接在一起,模拟潜艇在各种情况下的损管决策过程。系统结构图如图3所示,其中渗漏状况分析模块接收传感器发来的各种渗漏信息,对目标可能造成的危险度进行分析推理,选取主要渗漏目标,推理部分以规则库为基础,根据态势分析结果,建立动态事实库,由推理机给出当前渗漏局面应采取的决策方案,方案优化部分则根据不同的约束条件,判断当前方案是否可行,方案执行后,系统在新的条件下进行新的态势分析与推理[25]。
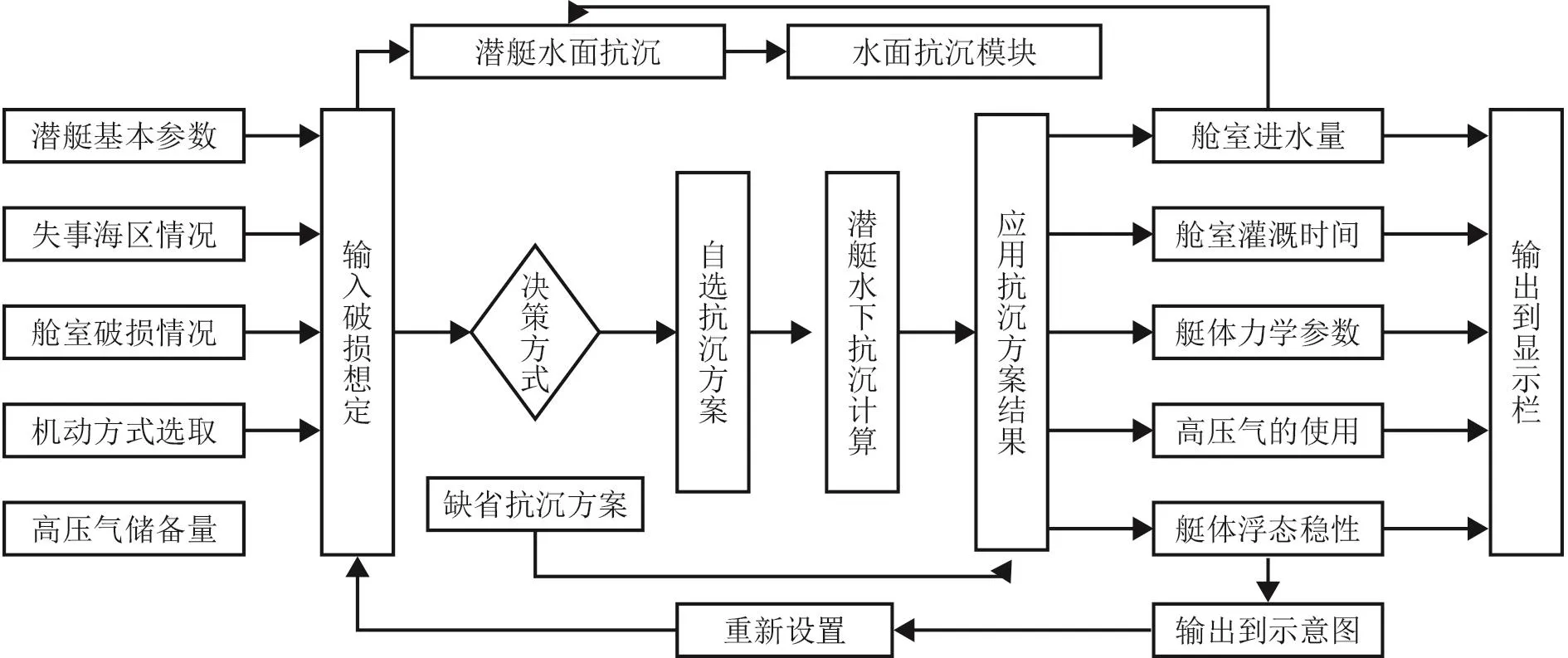
图3 潜艇水下抗沉程序流程图Fig.3 Submarine control flow chart

图4 决策系统结构图Fig.4 Structure diagram of decision system
4 发展趋势
从已有的研究结果上看,潜艇破舱辅助决策系统在未来的发展过程中会越来越趋于模块化,系统的各个组成部分既相互独立又共同协同作用保证系统的正常运行,各个模块在后续的使用或者研究中可以根据使用要求不断改进,也有利于系统的升级和维护。
潜艇破损辅助决策的专家系统知识库会不断完善,除了已有的人工输入的各种原始数据外,还会在工作过程中实时动态的自动添加潜艇在航行过程中遇到的各种状况以及其应对情况,以供指挥人员遇到事故时决策参考。
潜艇辅助决策系统最终所呈现的解决方案,不止一种,应该根据系统判断给出若干条按优先级排序的方案,以供指挥员在辅助决策系统的基础上,根据自己的丰富经验进行选择,两相结合,减少损失。
5 尚未解决的难题
抗沉知识库需要完善。潜艇发生安全事故与许多的因素有关,比如舱室进水、管道破损、耐压壳体破损以及卡舵等,但是已有的研究都不够全面,不能考虑到潜艇的全部甚至是大部分失事原因来建立潜艇破损辅助决策系统。当发生某些没有考虑到的失事原因时,辅助决策系统并不会启动,甚至会给潜艇指挥员造成潜艇还在正常航行的错觉,损失获救时间。
抗沉知识的表示方法有待进一步改进。从已有的研究来看,对知识的表示都是使用IF…THEN…结构,所有的知识都需要量化成特定的程序,但是有时这种方法也会导致与实际情况相悖。
在潜艇航行的过程中,总会有各种各样的状况发生,有时会存在信息缺失的情况,信息缺失情况下的辅助决策系统研究还有待进一步深入。
6 结 语
为了提高潜艇的战斗力,加强潜艇的抗沉性是必不可少的一环。由于人工智能和计算机技术的发展,将抗沉性研究与人工智能结合是当下研究的一大趋势和热点,即抗沉辅助决策系统。国外关于抗沉辅助决策系统的研究已经可以应用于潜艇并取得不错的效果,国内大部分研究都停留在理论层面上,距离实际应用还有一段距离,不过随着研究的深入和人工智能的发展,国内抗沉辅助决策系统也取得了很多成果,与国外的差距也在不断缩小。
