空间在轨环境下的30 cm离子推力器三栅极组件间距变化仿真分析
2019-12-03孙明明
孙明明,耿 海,王 亮,郑 艺
(兰州空间技术物理研究所真空技术与物理重点实验室,兰州 730000)
0 引 言
离子推力器是广泛应用于航天器在轨位置调节及轨道保持的一种静电加速式电推力器[1]。我国目前最新研制的大口径、高功率且具有多种工作模式(3 kW和5 kW两种功率模式)的离子推力器为兰州空间技术物理研究所研制的30 cm口径电推力器,该推力器采用环形永磁体磁场构型,并且为降低CEX(电荷交换离子)对加速栅的刻蚀影响,在传统的双栅系统(屏栅和加速栅)基础上,增加减速栅构成了三栅系统,以降低加速栅的离子刻蚀并提升其寿命。栅极组件是离子推力器束流加速及引出的关键部件,同时也是推力器获得高比冲和实现长寿命的制约。
为保证30 cm离子推力器三栅极组件的导流系数、束流发散角等工作参数,需通过初始装配以控制各栅极间留有一定间隙(即冷态间距)。在推力器工作过程中,随着温度的变化,栅极组件在热应力作用下发生热变形,导致此时的(热态)栅极间距与冷态间距明显不同。栅极间距过小会引起栅间打火频繁、启动困难等故障,而间距拉大会导致栅极刻蚀严重、推力器寿命缩短等可靠性问题。以美国NSTAR离子推力器30000 h寿命试验为例[2],在试验完成首轮2000 h后,开仓检测发现屏栅腐蚀严重,在缩小屏栅和加速栅间距,试验继续进行1000 h后,屏栅腐蚀基本已消除,证明栅间距变化对栅极刻蚀具有显著影响。Soulas等[3]在NSTAR离子推力器的栅极间距测量过程中发现,当屏栅和加速栅间距缩小至0.2 mm以下时,栅间的打火现象将频繁发生且推力器无法完成正常工作启动。Noord等[4]在NEXT离子推力器寿命试验过程中发现,在6.9 kW高功率模式下,由于温度变化引起的栅极间距异常缩小,导致加速栅在半径15.3 cm以外,下游区域栅孔存在大量六角星形腐蚀。Sengupta等[5]认为影响栅极离子刻蚀速率的主要原因为,热态栅极间距变化导致的离子束流聚焦特性以及栅孔对中性变化。Brophy等[6]在NSTAR离子推力器的改进过程中发现,栅极冷态间距仅调整4%,屏栅和加速栅孔径的刻蚀速率相比原刻蚀速率分别提高2%和9%。Goebel等[7]认为由于热膨胀效应造成的屏栅和加速栅间距变化,影响了束流加速区等离子体的运动轨迹,并直接造成栅极导流系数的改变。由于屏栅和加速栅均为边缘约束且带拱高结构,因此二者的热变形方向均为沿栅面法向并向外凸起。本课题组在前期研究中[8],通过试验发现,当30 cm离子推力器栅间距小于0.25 mm时,栅间打火现象将频繁发生,因此0.25 mm可作为推力器正常启动的最小栅极间距要求。目前国内对于工作时栅间距变化的动态过程研究尚处于起步阶段,在没有获得栅极热态间距的条件下,针对离子推力器束流引出以及栅极刻蚀的模拟,典型做法是将栅极冷态间距作为仿真模型的固定边界[9],但模拟结果将与实际情况存在较大差距。由于离子推力器在轨工作过程中,会受到各种复杂空间环境影响,如深空冷背景、太阳辐照影响,因此空间环境下的栅极间距变化程度远大于地面环境,且在轨无法进行栅极间距测量,只能通过仿真分析获得空间环境下的栅极间距变化。
本文采用有限元模拟与地面试验验证相结合的方法,首先对地面环境温度下的推力器三栅极热平衡温度进行仿真及校验。在模型经校验认为准确的基础上,考虑到5 kW功率模式下的栅极工作前后的温差更高,热形变位移最大,因此主要计算模拟空间环境下,推力器5 kW模式下启动全过程中的栅极热形变位移,并根据仿真结果对启动过程的栅极打火风险进行评估。
1 栅极热模型
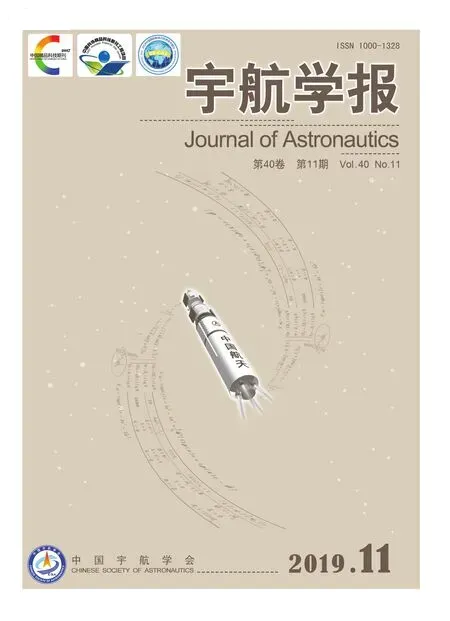
由于不同背景环境下的初始温度以及工作温度会造成栅极热态间距各不相同,因此获取工作阶段的温度变化曲线是计算栅极热态间距的前提。本文结合前期建立起的离子推力器能量沉积模型[10],获得栅极热分析边界条件,并采用有限元法模拟不同环境下的栅极温度变化曲线。由于栅极组件结构的复杂性,为确保仿真计算顺利进行,首先需对栅极结构进行简化处理,即删除栅极原有多孔特征,进行均匀化处理,但保留1:1拱高高度不变,简化后的栅极结构如图1(a)所示。其次对影响网格划分的表面凸起、硬边以及带缺陷圆孔等,均采用布尔操作进行修复或填补,对于约束部件(主要是标准件),在不改变约束面的基础上,进行简化处理,使得约束条件与真实情况基本一致,如图1(b)所示。最后,为了与地面热平衡试验结果进行对比,根据试验的真实情况,即推力器通过安装架固定至支撑板上,支撑板与热沉焊接,由此建立起热沉模型,如图1(c)所示,热沉大小以及位置均按实际尺寸建模。划分网格后的推力器模型如图1(d)所示。
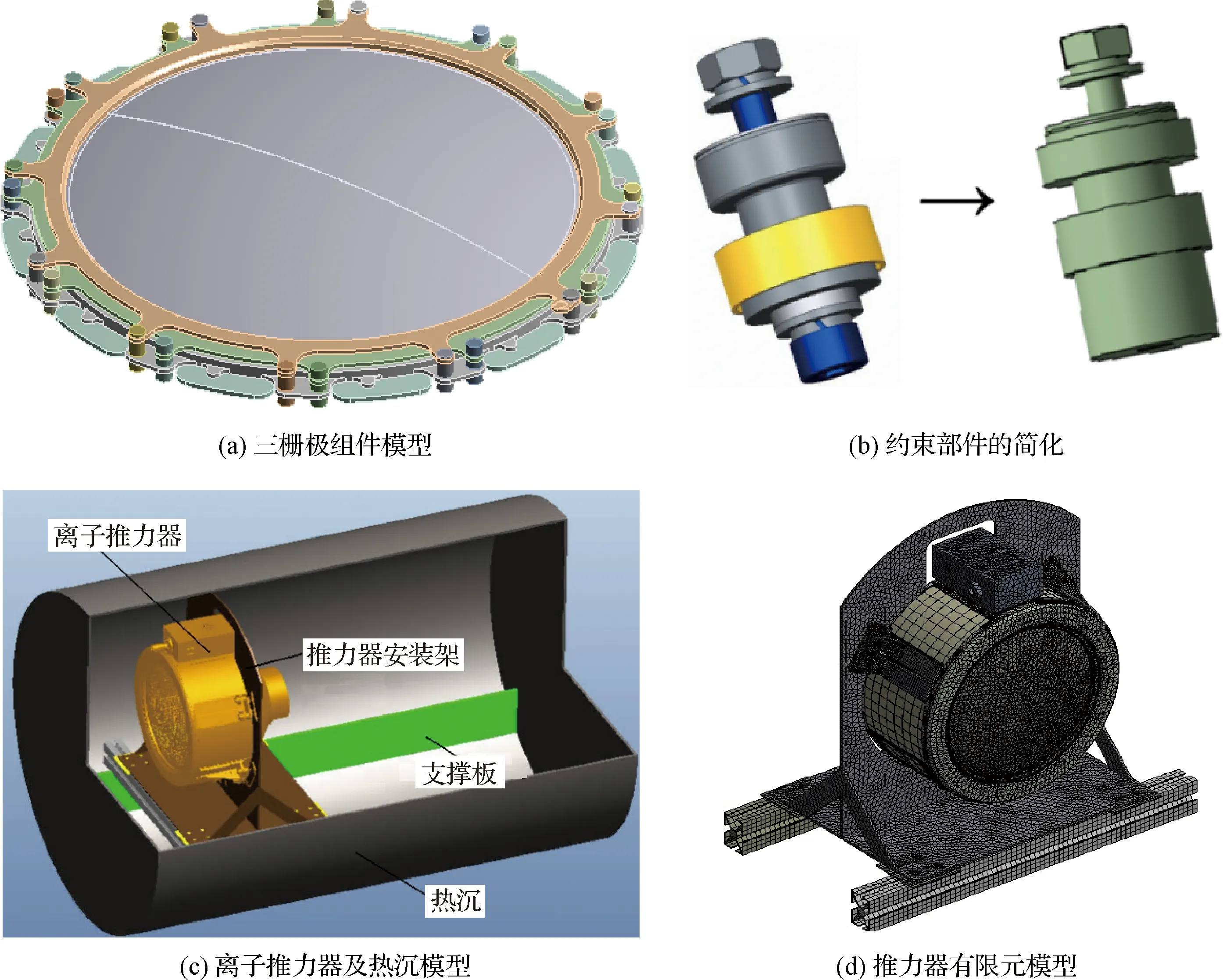
图1 三栅极组件及离子推力器分析模型Fig.1 Analysis model of the triple grid assembly and ion thruster
推力器在轨工作时,在其4个T型安装板上均焊接有主动加热装置(即主动热控),如图2(a)所示,主动热控可以提供60 W至90 W的加热功率,实现温控点在20 ℃至50 ℃温度范围内恒温,以保证推力器在空间低温环境下能够正常工作,图2(a)所示的温控点则用于评估主动热控的升温效果。最后对于辐射面设置,根据图1(c)所示地面真空设备内的推力器实际辐射关系,分别设置屏栅外表面-加速栅内表面、加速栅外表面-减速栅内表面、减速栅外表面-热沉内表面、阳极筒外表面-外壳内表面、外壳外表面-热沉内表面以及安装架-热沉内表面,共计6个辐射面对。热沉内表面的发射率和吸收率均按实测值设置,并且热沉内表面的热边界根据试验测量值设置为恒温边界(试验过程中热沉温度基本无波动)。模拟在轨工况时,则取消热沉部件,推力器处于开放空间,直接向空间辐射热量,如图2(b)所示,但需考虑卫星表面与推力器外壳间的辐射热交换。

图2 T型安装板及30 cm离子推力器对外辐射面Fig.2 T-type mounting plate and external radiant surface of30 cm ion thruster
推力器部分部件表面进行了阳极氧化处理,根据实测结果,设置阳极筒外表面、外壳内、外表面的发射系数均为0.8。对于栅极(采用Mo材料)的表面发射系数,不同的表面氧化状况(未氧化、轻微氧化、严重氧化)会使Mo材料表面的发射率在0.3至0.8之间变化[11],本文取栅极的表面发射系数为0.5,并根据实际的三栅极不同的开孔率进行等效。
其次,由于栅极结构已经进行了均匀化处理,因此需对栅极结构属性进行等效,根据前期研究结果[12],将栅极原有多孔结构处理为保持拱高不变且无孔结构后,可得到等效后的栅极组件材料力学特性。对于材料的热导率、热膨胀系数等参数均根据相关资料或试验数据设置,并且对于有限元模型中的所有标准件材料及其热力学属性均统一设置为氧化铝95瓷。对于力学约束边界,由于栅极组件与推力器本体通过螺钉进行固定装配,因此将所有装配螺钉均设置为固定约束。栅极温度场分布及热形变计算采用ANSYS软件进行,并将栅极温度随时间变化结果作为热形变位移仿真的输入条件。由于栅极模型近似为圆盘形且边缘均为螺钉固定约束,根据推力器的工作特点,中心区域束流密度最高而边缘最低,因此栅极的中心温度最高且沿径向逐渐降低,栅极热形变方向则均为沿栅面法向(模拟时默认为Z方向)并向外凸起[13]。
2 模型校验
为验证上述边界条件设置以及模型计算结果的准确性,本文以地面开展的离子推力器极限降温工况和30 W热控干预工况的试验结果来进行模型校验。试验在兰州空间技术物理研究所的TS- 6C设备中开展,其中极限降温工况是指当热沉温度稳定为-140 ℃,推力器不点火且无热控,从室温条件(25 ℃)降温至温度平衡(1 h内的温度变化率≤1 ℃)。试验结果显示,温控点达到温度平衡的时长为1115 min,软件模拟时长约为1000 min,各测温点平衡温度的仿真结果如表1所示。30 W热控干预工况是指当热沉温度稳定为-140 ℃,推力器不点火,主动热控加热功率恒定为30 W。该工况下,试验测量达到温度平衡的时间总长为1427 min,软件模拟时长约为1200 min,各测温点平衡温度的仿真结果如表2所示。

表1 极限降温工况下的试验结果及仿真结果(单位:℃)Table 1 Test results and simulation results under coolingcondition (units: ℃)

表2 30 W热控加热工况下的试验结果及仿真结果(单位:℃)Table 2 Test results and simulation results under 30 W heatcondition (units: ℃)
从表1和表2所示极限降温工况和30 W热控干预工况的比对结果来看,由于仿真过程忽略了推力器不同部件间的接触热阻,因此两种工况下,栅极温度平衡时长的仿真结果均低于试验结果。仿真分析与试验结果的比对误差较小且在15 ℃以内。两种工况的误差最大处均为屏栅支撑环,原因经分析认为,由于在仿真过程中,屏栅支撑环与推力器本体的连接标准件全部设置为95瓷材料,推力器本体对栅极的热传导通过陶瓷导热,而实际情况是仍有部分热量通过金属螺钉进行传导,因此无热源时,屏栅支撑环降温慢,而有热源时,屏栅支撑环升温慢,导致出现表1和表2所示结果,但鉴于整体误差较小,因此认为热模型具有较好的准确度和可信度。
3 空间环境下的栅极间距仿真
推力器在轨工作时,空间环境温度对栅极间距具有较大影响,根据前期研究结论[12],栅极从初始温度T0到平衡温度T1的温差ΔT对热形变的影响占主导地位。其次由于Mo材料的再结晶温度最低为800 ℃[14],即栅极温度至少需高于该温度,栅极才会发生塑性变形,而前期试验结果表明,栅极平衡温度最高不会超过500 ℃[12],因此在推力器工作过程中,栅极组件应处于线性变形阶段,即热应力σ与温差ΔT存在线性关系,而主动热控可改变栅极初始温度T0,从而实现通过减少ΔT,达到降低σ的目的。本文设置了3种空间环境工况,分别为空间极限低温、空间背景影响以及主动热控干预,并针对这3种工况分别进行了推力器点火启动全过程的栅极间距变化模拟。对于推力器点火启动的热流边界,根据前期建立起的离子推力器能量沉积模型[10],造成推力器温度升高的能量来源主要是各种能量粒子(如一价、二价Xe离子以及原初、二次电子)在放电室和栅极表面的能量交换以及放电室等离子体的激发辐射过程。其中粒子沉积能量可根据粒子沉积电流和电势给出,而激发辐射能量则根据等离子体的总激发能以及不同部件的等效面积得到。由于分析对象为三栅极结构,从前期试验结果来看,在5 kW和3 kW工作模式下,减速栅的截获电流均非常小,且等离子体的能量辐射受到屏栅和加速栅的阻挡效应,因此对减速栅未设置沉积能量。通过能量沉积模型计算得到,在5 kW工作模式的额定电气参数下,屏栅的等效面热流为2116.8 W/m2,加速栅为312.2 W/m2。
3.1 空间极限低温工况
此工况下,空间环境温度为-269 ℃(4 K环境),主动热控关闭(模拟热控发生故障),忽略太阳辐照效应(处于太阳阴影区),推力器从该温度下以5 kW工作模式点火启动。得到该工况下屏栅和加速栅中心区域的温度变化曲线如图3所示,限于篇幅,未给出减速栅温度变化曲线。

图3 -269 ℃空间环境下的栅极温度变化曲线Fig.3 Temperature change curve of the grids under -269 ℃ space environment
从图3所示结果来看,当推力器从-269 ℃的初始温度启动,屏栅约在10000 s后才能达到温度平衡,平衡后的中心区域温度为385 ℃,而加速栅约在8000 s后即达到温度平衡,平衡后的中心区域温度为320 ℃左右,二者温差达到65 ℃。原因经分析认为,加速栅的温度升高主要是在屏栅升温后对其产生热辐射效应引起,属于被动升温,而屏栅则直接受到放电室等离子体辐射作用,因此屏栅温度最高,加速栅次之,减速栅温度则最低。由于屏栅开孔率最高且厚度最小(0.4 mm),导致屏栅热容最低[15-16],在温度升高以及边缘均被约束的情况下,屏栅中心的Z方向(即栅面法向方向)变形量最大,加速栅次之,减速栅中心变形最小,因此会出现屏栅与加速栅、加速栅与减速栅的相对间距均缩小的现象[17]。
从仿真分析结果来看,也验证了上述结论。三个栅极热形变达到稳定的时间约在推力器启动后8000 s,其中屏栅中心的Z方向热变形为2.48 mm,加速栅为1.67 mm,二者差值为0.81 mm,而屏栅和加速栅初始间距为0.85 mm至0.95 mm,因此二者在热平衡下的最大栅间距为0.14 mm。减速栅热变形为0.88 mm,加速栅和减速栅初始间距为0.75 mm至0.85 mm,因此在-269 ℃的初始温度下,推力器工作温度平衡后,加速栅和减速栅最大间距为0.06 mm,二者几乎发生贴合,推力器将无法实现正常工作。
本工况是推力器处于空间冷背景环境,在无主动热控及太阳辐照的影响下启动的一种极端情况。从该工况的分析结果来看,由于栅极温度从初始达到平衡后,存在极高的温度差ΔT,会导致推力器在启动后不久,栅极随着温差变大导致间距过小,甚至存在贴合现象。
3.2 空间背景影响工况
上述工况是一种极端情况,而实际上,当推力器在轨运行时,会受到不同程度的太阳辐照、卫星帆板恒温或者是地球红外返照影响,因此栅极的初始启动温度要远高于-269 ℃的极限温度。本课题组通过联合航天五院通信卫星事业部,对空间背景影响工况下的栅极启动温度进行了仿真,得到屏栅的初始温度为-66 ℃,加速栅和减速栅分别为-69 ℃和-102 ℃,运算过程本文不再给出。
采用与前述同样的仿真分析方法,计算得到推力器达到热平衡后,屏栅、加速栅和减速栅中心区域Z方向的最大热变形分别为2.36 mm、1.63 mm和0.91 mm。根据三个栅极的初始相对间距,得到屏栅和加速栅热平衡下的最大间距为0.22 mm,加速栅和减速栅最大间距为0.13 mm。由此可见,即使是受到在轨空间背景影响,栅极初始温度有大幅提高,但推力器仍无法实现正常工作。
3.3 主动热控干预工况
从上述两种工况的分析结果来看,热平衡下的栅极间距均远低于安全间距,因此在轨工作时,须增加主动热控来提高栅极启动初始温度,从而降低栅极达到热平衡后的温度差,以确保栅极间距在安全范围内。
根据推力器的实际工作流程,5 kW功率下的启动过程被分为了6个不同阶段,分别包括4个档位的束流调节、束流闭环以及额定束流调节,根据不同启动阶段的电、气参数,结合推力器能量沉积模型,可计算得到不同阶段的热流边界,如表3所示。
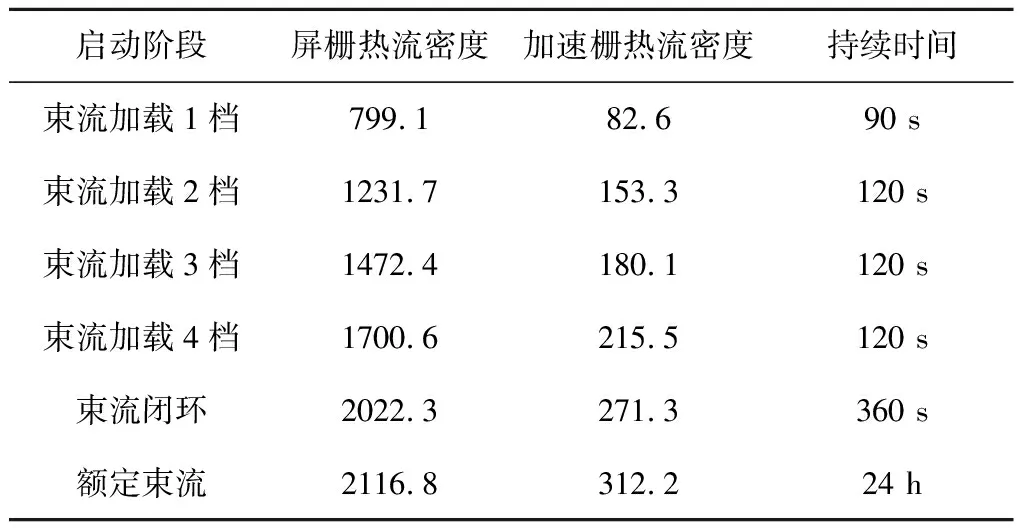
表3 推力器不同启动阶段的热流加载条件(单位:Wm-2)Table 3 Surface heat flux in different start-up step(units: Wm-2)
根据上述空间背景影响工况下的栅极启动温度,并考虑主动热控工作,设置温控点温度为20 ℃(热控的最低温度),计算得到屏栅、加速栅和减速栅的初始启动温度T0分别约为-6 ℃、-18 ℃和-25 ℃。在此基础上,根据表3给出的边界条件计算栅极温度变化曲线,并完成热形变位移分析。早期试验结果显示,推力器一般在3 h后温度能够达到平衡[12],因此仿真时长同样设置为3 h(10800 s)。图4(a)所示结果为10800 s内的栅极热形变位移变化,为了重点研究启动阶段内的栅极间距变化,本文给出了1000 s时长内(从束流1档一直到束流闭环)的三个栅极的相对热形变位移变化曲线,如图4(b)所示。根据图4所示结果,可得到推力器工作3 h内的实际栅极间距,如表4所示,表中给出的计算值均为最小间距,即取屏栅与加速栅、加速栅与减速栅的冷态间距分别为0.85 mm和0.75 mm。
图4 在20 ℃主动热控条件下的推力器不同启动阶段的栅极热形变位移Fig.4 Thermal deformation of the grids in start-up process under 20 ℃ control temperature
根据表4所示结果来看,在启动后约450 s左右,屏栅与加速栅间距已降低至0.25 mm以下,但此时加速栅与减速栅的间距几乎无变化。当推力器达到束流闭环时(810 s),屏栅和加速栅间距逐渐增大,而加速栅和减速栅间距则持续降低。在引束流约8000 s后,栅极间距达到稳定值,此时栅极的温度也已基本稳定。造成图4和表4所示结果的原因经分析认为,主要是三个栅极的不同温度变化过程所决定。屏栅受热最快,加速栅次之,减速栅由于受到遮挡效应温升最慢,从图4(a)曲线来看,前400 s内加速栅和减速栅几乎还未发生热变形,而屏栅中心Z方向已发生约0.5 mm的变形。在400 s以后,加速栅温升起来,加速栅的形变量高于屏栅和减速栅,从而导致图4(b)出现屏栅与加速栅间距增大,而加速栅和减速栅间距缩小的现象。在推力器工作8000 s后,栅极间距已基本固定,屏栅与加速栅,加速栅与减速栅的间距分别为0.25 mm和0.2 mm。

表4 在20 ℃主动热控下的不同启动阶段的栅极组件热态间距值Table 4 Hot gap change in different start-up step under 20 ℃control temperature
本文通过计算,得到当主动热控提供温控点恒温为30 ℃时,在推力器全启动过程且达到温度平衡的情况下,屏栅和加速栅的最小间距为0.27 mm,而加速栅和减速栅最小间距为0.22 mm。当主动热控提供温控点恒温为40 ℃时,推力器达到温度平衡后,屏栅和加速栅、加速栅和减速栅的最小间距分别为0.28 mm和0.24 mm。因此当主动热控恒温为30 ℃和40 ℃时,仍不能满足0.25 mm的栅极安全间距要求。当主动热控将温控点恒温至50 ℃时,仿真得到10800 s内的栅极热形变位移变化,以及在1000 s时长内,不同启动阶段的三栅极热形变位移变化过程,分别如图5(a)和图5(b)所示。表5所示为离子推力器全启动过程中,从束流1档一直到束流闭环内的栅极间距变化,从结果来看,推力器启动后约9000 s左右,栅极间距不再发生变化,且平衡后的三个栅极的两两间距均能够满足0.25 mm的安全间距要求。

图5 在50 ℃主动热控条件下的推力器不同启动阶段的栅极热形变位移Fig.5 Thermal deformation of the grids in start-up process under 50 ℃ control temperature

表5 在50 ℃主动热控下的不同启动阶段的栅极组件热态间距值Table 5 Hot gap change in different start-up step under 50 ℃control temperature
4 结 论
从本文给出的3种在轨工况分析结果来看,30 cm离子推力器在-269 ℃深空冷背景以及空间背景影响条件下,均无法实现正常启动,而只能借助主动热控干预。5 kW工作模式下,主动热控提供温控点分别恒温为20 ℃、30 ℃和40 ℃时,推力器温度达到稳定后,栅极间距无法满足安全间距要求。当主动热控提供温控点恒温为50 ℃时,推力器工作稳定后的屏栅和加速栅、加速栅和减速栅的最小间距分别为0.31 mm和0.30 mm,可满足栅极安全间距要求。
在目前地面环境尚无法创造在轨工况环境,且仿真计算结果无法验证的条件下,本文的分析结果均为最恶劣情况,栅极间距仿真结果均为最小值,而实际在轨运行时,栅极间距应大于本文分析结果,计算结果保留了一定余量。分析结果证明,主动热控干预能够提供给推力器栅极组件更高的启动温度,从而有效降低栅极达到温度平衡后的温差,降低栅极热形变带来的危害。对于30 cm离子推力器实际在轨应用时,可调整热控加热功率,使温控点温度保持在50 ℃左右,能够最大程度地提高推力器工作可靠性。