四旋翼飞行器演示仪的研究与设计
2019-12-02马振江赵永辉蒋恒侯晓峰沈晓玉马国利
马振江 赵永辉 蒋恒 侯晓峰 沈晓玉 马国利
摘 要:四旋翼飞行器演示仪可以清晰直观的展示在空中是如何做前后左右平移、上升下降等基本动作。使用皮带传动的方式来演示四旋翼的六自由度运动过程,舵机用来演示四旋翼前后左右的倾斜方向,这样既能精确控制又能保证演示的安全性。
关键词:四旋翼;飞行原理;控制
中图分类号:V22 文献标志码:A 文章编号:2095-2945(2019)32-0084-03
Abstract: The four-rotorcraft demonstration instrument can clearly and intuitively show how the basic movements are about how to do it before and after the movement, rise and fall. The use of belt drive to demonstrate the four-rotor six-degree-of-freedom movement process, the steering gear used to demonstrate the four rotor before and after the tilt direction, so that both accurate control and the safety of the demonstration can beguaranteed.
Keywords: four rotor; flight principle; control
引言
四旋翼飛行器是一种结构新颖、性能卓越的新型无人飞行器,涉及众多领域的高、精、尖技术,具备重要的应用价值[1]。关于四旋翼飞行器不少人对它有一种神秘感,并不能理解这样的一个“怪物”是如何在空中灵活运动的。随着无人机行业的快速发展,现在大家都把重点放在了无人机性能、功能以及应用方面的研究,却忽略了普通人并不知道四旋翼为什么能够在空中灵活运动,这使得四旋翼虽然走进了千家万户,对它却还是一知半解。研究设计一款四旋翼飞行器演示仪将为人们解开四旋翼的神秘面纱。设计的这款四旋翼飞行演示仪通过机械装置来演示四旋翼的运动过程,让四旋翼的运动原理一目了然。四旋翼的飞行原理和理论数据是四旋翼演示仪的理论基础。
1 四旋翼飞行原理
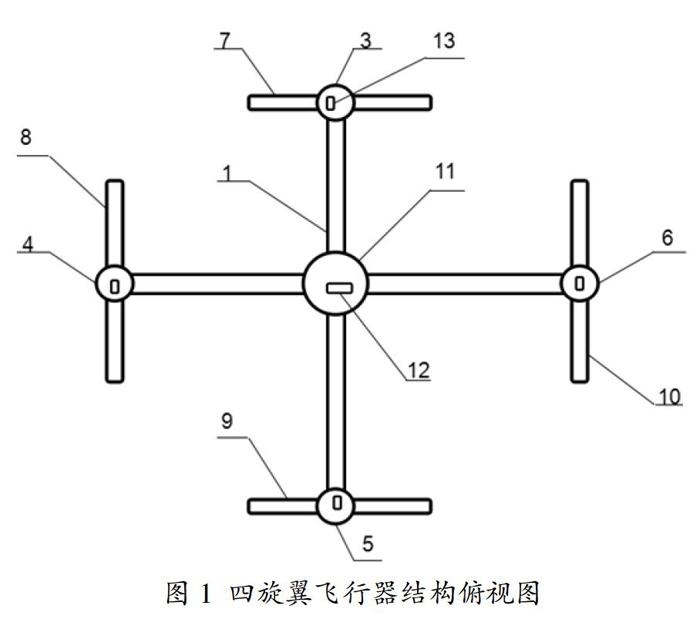
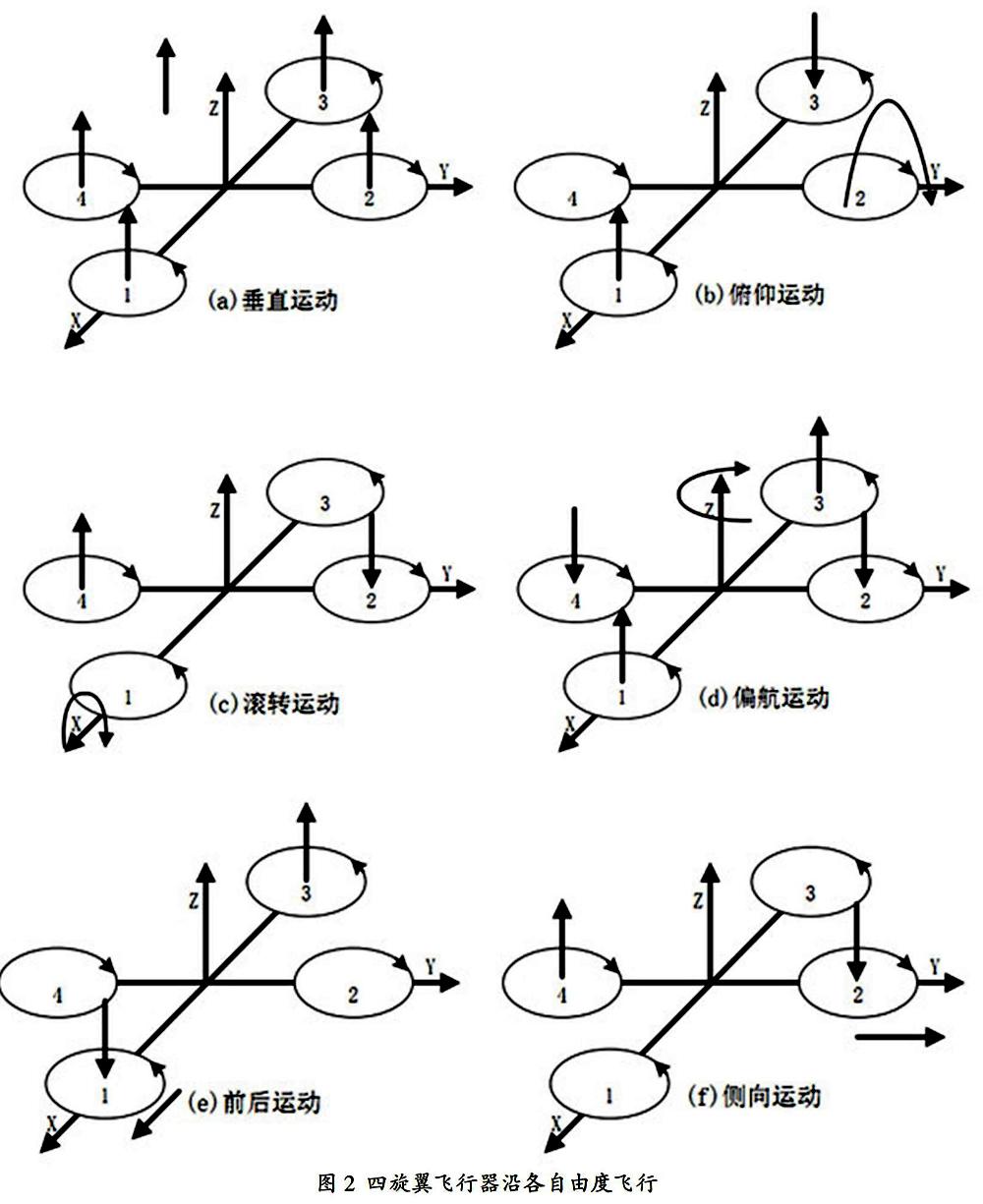
旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制器和外部设备[2]。结构形式如图1所示。四旋翼飞行器是一种六自由度的垂直升降机,虽只有四个输入力,却有六个状态输出,所以它又是一种欠驱动系统[3]。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。在图2所示中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动[4],在旋翼运动平面上的箭头向上方表示此电机转速提高,箭头向下方表示此电机转速下降。
2 结构设计
四旋翼原理演示仪没有采用真正的动力飞行,而是使用机械结构来进行四旋翼的飞行原理演示。采用机械结构是为了更好的演示四旋翼的飞行原理,这样就解决了在小场地、低速运动下也能让四旋翼“飞”起来,能更清楚直观的演示多旋翼的飞行运动原理。整套系统包括机械结构和控制部分。
2.1 机械机构
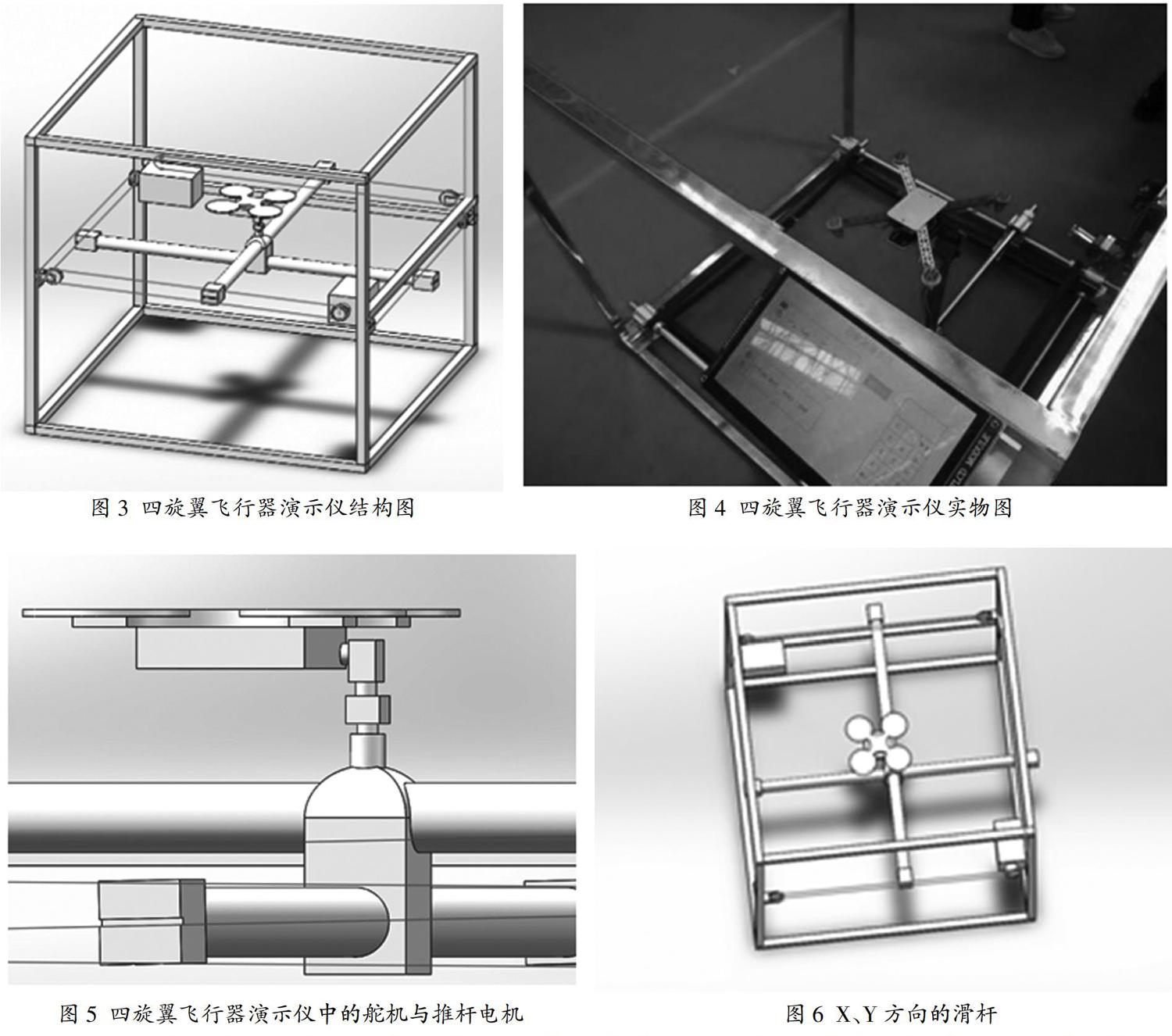
机械结构主要包括四旋翼飞行器、支撑及传动部分。结构、实物如图3、4所示。
2.1.1 四旋翼飞行器
把四旋翼飞行器的四个电机及旋翼拆掉,在每个电机、旋翼处安装6个LED灯,根据6个LED灯闪烁旋转快慢直观的展示电机(旋翼)的转速,清楚的展示四个电机的差速。
2.1.2 支撑及传动部分
演示仪由一个边长为1m的立方体钢架支撑,在四旋翼飞行器下面由上往下安装有2个舵机,控制飞行器前后左右的倾斜,下面舵机与推杆电机相连,推杆电机控制飞行器的升降。推杆电机安装在X、Y滑杆交汇处,如图5所示。在靠近钢架底部安装有2台步进电机,步进电机分别与飞行器支撑横杆X、Y由皮带相连接,由步进电机控制飞行器在X、Y轴方向上的运动。
2.1.3 控制部分
控制部分包括遥控器、液晶屏、飞行控制器、单片机。由遥控器或者液晶屏输入运动状态指令,飞行控制器接收到指令后,一方面控制四组LED灯的闪烁旋转的速度,另一方面把运动状态指令(前后左右、上升下降)通过单片机控制舵机、步进电机、推杆电机,使得飞行器前后左右、上升下降运动。在操作体验方面采用了两种控制方式:(1)通过遥控器推杆演示,这个更贴近真实的四旋翼飞行器的遥控方式;(2)通过输入四个电机的转速控制四旋翼的运动,这种方式可以更好的验证四旋翼的运动原理。
3 四旋翼飞行器演示仪“飞行”控制
(1)垂直运动:在图2(a)中,同时增加四个“电机”的输出功率,LED灯旋转加快,四旋翼飞行器便在推杆电机的作用下垂直上升;反之,垂直下降。
(2)俯仰运动:在图2(b)中,LED灯1的转速上升,LED灯3的转速下降(改变量大小应相等),LED灯2、LED灯4的转速保持不变,产生的不平衡力矩使机身绕y轴旋转;反向同理,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动[5]。
(3)前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图2(e)中,增加LED灯3转速,使拉力增大,相应减小LED灯1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图2(b)的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。(在图2(b)、(c)中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动)
4 结论
四旋翼飞行器演示仪是设计在立方体空间内可以做六自由度飞行演示。此套设备简单,在演示、教学中独辟蹊径,并通过此机械结构可以解决使用实际飞行时速度快、空间小而无法进行原理演示的问题。有两种控制演示方式:(1)通过遥控器推杆演示,这个更贴近真实的四旋翼飞行器的遥控方式;(2)通过输入四个电机的转速控制四旋翼的运动,这种方式可以更好的验证四旋翼的运动原理,能够使体验学习者更好的掌握四旋翼的运动原理;这两种不同的演示方式使四旋翼飞行器演示仪能够应用到更多的场合中去。
参考文献:
[1]刘杰.四轴飞行器研究与设计[D].南京:南京邮电大学,2013.
[2]吕国强,郑德峰.四旋翼飞行器控制系统设计[J].价值工程,2014:213-214.
[3]杨明志.四旋翼飞行器自动驾驶仪设计[D].南京:南京航空航天大学,2009.
[4]周俊涛.四旋翼飞行器飞行控制系统的设计与实现[D].大连:大连理工大学,2012.
[5]李波陈,王洪洲,刘晓栋,等.可伸缩折叠式四旋翼飞行器设计[J].机械研究与应用,2015,28(2):121-124.
