干旱区Landsat8全色与多光谱数据融合算法评价
2019-12-02杨丽萍潘雪萍
杨丽萍,马 孟,谢 巍,潘雪萍
(1.长安大学地质工程与测绘学院,西安 710054;2.长安大学地球科学与资源学院,西安 710054)
0 引言
随着遥感平台和传感器技术的快速发展,高空间分辨率、高光谱、多时相、多平台的海量遥感数据日益增多,如何尽可能地综合海量数据的优势,克服遥感影像自动解译过程中存在的单一数据源的不足,遥感数据融合技术应运而生并成为遥感研究的热点问题之一[1]。遥感影像融合是一种通过高级影像处理来复合多源遥感影像的技术[1]。融合算法可以综合利用不同传感器或同一传感器的不同波段所提供的光谱、空间以及时相信息,达到提高影像空间分辨率、保持多光谱特征及识别目标地物的目的,融合之后影像的视觉效果和清晰度均有所提高[2]。
国内外学者对不同传感器影像数据的融合算法进行了大量研究,代表性的算法有主成分变换法(principle component transform,PC)、比值变换法(brovey transform,BT)、HSV(hue-saturation-value)变换法、相位恢复变换法(Gram-Schmidt pan sharpening,G-S)、高通滤波算法(high pass filtering,HPF)和小波变换法(wavelet transform,WT)等,并依据均值、标准差、信息熵和平均梯度等评价指标及地物分类精度对融合效果进行了评价[3-9]。已有研究主要服务于土地利用分类、森林资源监测、影像专题图制作和矿藏探测等方面[4,10-11],在干旱区特征地物识别及土地利用分类适用性评价方面的工作尚不多见。居延泽古湖盆区深居欧亚大陆腹地,是我国典型的干旱区,降雨量少、蒸发强烈,植被退化严重,土地沙漠化、盐碱化问题突出,生态环境极其脆弱。该区域存在大量古湖退缩过程中遗留的古湖岸线,其有效提取对于区域环境变化研究意义重大。然而,特殊的地理位置和地理环境使区域内部地物类别较为单调、地物之间界限模糊,因而特征提取和地物分类难度较大。基于传统像元分类的方法不能较好地区分研究区的各类地物;而面向对象的分类方法可以充分利用影像的光谱、形状、纹理和空间关系等特征,在干旱区土地利用分类中具有一定的优势。
基于居延泽地区Landsat8陆地成像仪(operational land imager,OLI)全色和多光谱数据,选取6种常用的融合算法,利用主观定性评价和11种单因素指标定量评价,并结合面向对象的分类方法,综合评价各融合算法的融合效果,以期为干旱区特征地物提取和地物分类研究提供参考。
1 研究区概况与数据源
1.1 研究区概况
居延泽盆地、苏古淖尔盆地和嘎顺淖尔盆地共同组成了居延海(图1(a))。居延泽盆地位于内蒙古自治区阿拉善盟额济纳旗的东南部,地理位置为N41°40′~42°,E101°30′~102°。该盆地北邻阿尔泰山,南与巴丹吉林沙漠相接,由中部南北向高脊分为东居延泽和西居延泽2部分(图1(b))。因黑河下游改道,东居延泽现已全部干涸,西居延泽只残留小部分的湖沼,即天鹅湖[12]。盆地周围保存了古湖退缩过程中遗留的多条环状古湖岸线,是区域环境变化的良好证据。

图1 研究区位置示意图Fig.1 Location of research area
1.2 数据源
Landsat8于2013年2月11日成功发射,携带了2个主要载荷,即陆地成像仪(operational land imager,OLI)和热红外传感器(thermal infrared sensor,TIRS)[13]。OLI成像仪共有9个波谱段(B1~B9),其中全色波段(B8)地面空间分辨率为15 m,其他谱段地面空间分辨率为30 m。TIRS成像仪携带2个空间分辨率为100 m的热红外波段(B10和B11)。
采用2017年9月18日居延泽地区的Landsat8 OLI影像,轨道号/行号为133/31,云覆盖量小于10%,利用ENVI5.3软件对影像进行裁剪、辐射定标和大气校正等预处理。
2 影像融合算法
2.1 PC法
PC法首先对原始多光谱数据进行主成分变换,由多光谱各波段间相关矩阵的特征值和特征向量求得各主成分分量;其次,用全色波段替换第一主成分分量,与其他各主成分分量进行主成分逆变换得到融合影像[14]。
2.2 BT法
BT法是将遥感影像每个波段乘以融合波段,然后再除以波段单位中输入波段总数,其中3个波段运算的表达式为[15]
Binew=[Bi/(BR+BG+BB)]×Bh,
(1)
式中:Binew为融合之后的波段像素值(i=1,2,3);BR,BG和BB分别代表原始影像中红光、绿光和蓝光波段像素值;Bi表示红光、绿光和蓝光3波段中的任意一个;Bh代表高空间分辨率遥感数据。
2.3 HSV法
HSV法是遥感影像融合中较常使用的一种算法。它将多光谱RGB图像数据变换到HSV空间,得到3个独立分量,用高空间分辨率的波段代替颜色亮度值波段,采用重采样技术将色度和饱和度重采样到高空间分辨率像元尺寸,然后再变换回RGB色度空间,得到融合影像[16]。
2.4 G-S法
G-S法是通过对多光谱影像进行正交化的算法,可消除冗余信息,改进了PC法中信息过于集中的问题,且不受波段限制,能够较好地保持空间纹理及光谱特征等信息[17]。
2.5 HPF法
HPF法是通过利用高通滤波器算子分离出全色波段的空间信息,并采用像元相加方法将其叠加到多光谱影像上,从而保留低空间分辨率多光谱影像的光谱信息和高空间分辨率全色波段的空间信息,实现遥感影像融合[18]。
2.6 WT法
WT法是对影像在不同的频率通道上进行处理的融合方法。它首先将原始影像分解成频率域上各个频率的子影像,以代表原始影像的各个特征分量;然后根据不同特征分量采用不同的融合方法以达到最佳的融合效果[19]。
3 融合效果评价方法
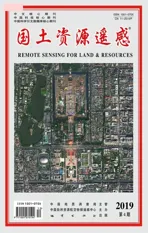
常用的评价方法分为定性评价和定量评价2大类。定性评价是通过目视解译进行主观评价,尽管受主观因素影响较强,但其具有直观、快捷的优点,对融合结果的初步评价具有实际参考价值。单因素指标[20]定量评价,综合考虑影像空间细节特征的增强与光谱信息的保持能力,在融合效果评价中应用广泛。其中,单因素评价指标又可分为2类:第一类反映空间细节信息,如均值、标准差、平均梯度、信息熵、联合熵(combination entropy,CE)、空间频率(spatial frequency,SF)[21];第二类反映光谱信息,如结构相似性(structural similarity index,SSIM)、峰值信噪比(peak signal to noise ratio,PSNR)、光谱扭曲度、偏差指数、相关系数[21-22]。各指标公式及含义如表1所示。

表1 评价指标Tab.1 Evaluation index
(续表)
4 融合效果评价
影像融合是影像解译的基础,不同融合算法所得结果存在一定差异,本文选择具有代表性PC法、BT法、HSV法、G-S法、HPF法和WT法等6种基于像素的融合方法对影像进行融合,并从定性、定量和分类适用性3个方面进行融合效果评价。
4.1 定性评价
图2为Landsat 8影像B5,B4及B3与全色波段的融合结果,图2(a)为原始多光谱影像,图中红框区域A,B,C分别对应道路、工厂及古湖岸线,不同融合算法的效果如图2(b)—(g)所示。
(a)原始多光谱图像 (b)PC融合效果 (c)BT融合效果 (d)HSV融合效果

(e)G-S融合效果 (f)HPF融合效果 (g)WT融合效果
图2 图像融合效果比较
Fig.2Comparisonofimagefusionresults
为了增强道路及古湖岸线等纹理信息,对原始影像及融合之后的影像进行直方图均衡化,局部放大的3类地物特征的融合效果如图3所示,图中每个区域从左到右融合方法分别为PC,BT,HSV,G-S,HPF和WT法。从图中可见,融合影像的空间分辨率均得到明显提升,道路、工厂及古湖岸线等纹理信息相较于原始多波段影像更为清晰。从光谱特征来看,HSV法融合影像上水体、沙地的颜色变化明显;BT法、G-S法及PC法融合影像的颜色有一定失真;HPF法和WT法融合影像与原始多光谱影像颜色更为接近,色彩保真度较好。目视效果难以区分各融合影像中古湖岸线及道路清晰度的差异,因而需要通过定量评价,进一步比较融合效果。

(a)区域A道路融合效果

(b)区域B工厂融合效果

(c)区域C古湖岸线融合效果
4.2 定量评价
通过Matlab计算原始多光谱影像与各融合影像B5,B4和B3波段单因素指标(表1),再求出各单因素指标的平均值,结果如表2所示。

表2 融合效果评价指标Tab.2 Evaluation indicators of fusion results
由表2可知,在空间细节信息的表达上,均值变化越小,光谱保真度越高;标准差越大,空间信息越丰富。从均值和标准差来看,HSV法的数值相对较大,G-S法和PC法次之,G-S法的值略高于PC法,HPF法和WT法数值相对较小,但WT法的均值与原始多光谱影像的均值最为接近,其灰度值变化最小,BT法数值最小,表明HSV法融合影像平均亮度最强,包含更加丰富的空间信息。平均梯度、信息熵、联合熵及空间频率越大,图像的活跃度、清晰度以及反映空间细节的敏感度越好。从结果来看,6种融合算法较为一致,HSV法的数值相对较大,略优于WT法,说明HSV法能够较好地反映目标地物的细节变化和纹理特征;总体上HPF法、G-S法和PC法的值相当,其值均高于BT法的值,说明BT法空间信息损失较大。在光谱保真度方面,结构相似性和峰值信噪比越大,图像保真度越高、结构失真越小、抑制噪声效果越好。由表2可知,BT法、HSV法、G-S法、HPF法及WT法的值呈逐渐上升趋势,G-S法和PC法的值相近,说明WT法图像失真较小,更符合人眼的视觉系统。光谱扭曲度越小,说明光谱信息保真度越高,从光谱扭曲度的结果来看,BT法、HSV法、G-S法、HPF法及WT法的值呈逐渐下降趋势,说明BT法和HSV法光谱畸变最大,HPF法和WT法融合图像可以较好地保留原始图像光谱特征,G-S法数值略低于PC法的值,偏差指数和相关系数的结果和光谱扭曲度的结果类似,区别在于HSV法数值略大于G-S法和PC法的值,主要是因为HSV法全色波段与多光谱波段融合效果较好,其融合结果能够较好地表达空间细节。
4.3 面向对象分类及精度评价
考虑到融合图像应用广泛,对融合算法的评价除单因素指标定量评价外,还应分析融合效果对图像分类精度的影响。居延泽位于西部干旱区,地物类别单一且地物特征不明显,基于传统的像元分类方法分类效果不佳,故采用面向对象分类的方法对影像进行分类,以期较大程度地提高地物自动识别的精度。
4.3.1 地物分类
根据全国第二次土地利用现状图,并结合实地考察和目视解译,将研究区地物类别分为裸地、沙地、滩涂、植被、水体和盐碱地等6类,使用德国Definiens Imaging公司2009年推出的智能化影像分析软件——eCognition[23]进行地物分类。首先,对原始影像及各融合影像进行多尺度分割,经过反复实验,确定原始多光谱影像(空间分辨率30 m)分割尺度为5、各融合影像(空间分辨率15 m)分割尺度为8时,地物间分割效果较好;其次,采用阈值分类算法和Cart分类器决策树算法相结合的面向对象分类方法对其进行分类;最后,对上述地物选取验证样本进行精度评价。阈值分类算法是通过不同地类灰度值的差异进行分割,Cart分类器决策树算法需要在影像中寻找样本对象,通过数学统计和归纳方法等,将数据分为许多个内部同质的子集[23]。由于水体、植被、盐碱地及滩涂灰度值差异较大,故这4种地物的分类采用阈值分割算法,而沙地和裸地灰度值差异不明显,故采用Cart分类器决策树算法对其分类。其中BT法融合影像中的滩涂分别采用阈值分割算法和Cart分类器决策树算法进行分类。
4.3.2 分类精度评价
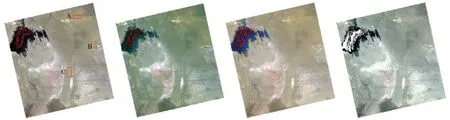
各融合算法的分类结果如图4所示。

(a)原始多光谱分类结果 (b)PC分类结果 (c)BT分类结果 (d)HSV分类结果
(e)G-S分类结果 (f)HPF分类结果 (g)WT分类结果

图4 不同融合算法分类结果
Fig.4Classificationresultsofdifferentfusionmethods
由图4可见,研究区的地物类别主要以沙地为主,且各地物成片状分布,拓扑空间关系较单一,从光谱扭曲度的结果可知,G-S法、PC法、HSV法及BT法相较于原始影像光谱扭曲度较大。综合考虑干旱区特殊的地理环境和光谱信息等特征,G-S法、PC法、HSV法及PC法分类效果并没有原始影像的分类效果好。在目视分析的基础上,进一步开展定量评价,精度评价结果如表3所示。由表3可见,WT法和HPF法的总体分类精度和Kappa系数值均高于原始影像的分类结果,说明这2种融合算法对原始影像的分类精度有一定的改进;BT法和HSV法的总体分类精度相对较低;G-S法和PC法的分类精度略低于原始多光谱影像的分类精度。

表3 精度评价Tab.3 Accuracy evaluation
不同类别地物精度评价对比如图5所示。
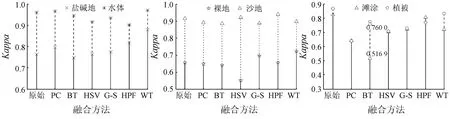
图5 不同类别地物精度对比Fig.5 Accuracy comparison of different ground objects
由图5可见,各地类的Kappa系数存在一定差异,水体>沙地>盐碱地>植被>滩涂>裸地。裸地的分类精度较低(不到75%),主要原因是滩涂、裸地及沙地光谱相似,又因干旱区独特的自然地理环境,使裸地错分至滩涂和沙地的误差增大。针对不同地类的Kappa系数,各融合算法对地类的识别效果有一定的差异,WT法对裸地、盐碱地和水体的分类识别较好,HPF法则能较好地识别沙地。从BT法的分类效果来看,滩涂的分类精度较低,主要是因为BT法光谱扭曲较大,滩涂与裸地在影像上灰度差异不明显,采用阈值分割法对其分类时精度较低,如图5和表3所示,采用Cart分类器决策树算法对滩涂分类时,滩涂的Kappa系数从0.516 9提高至0.760 0,BT法的总体分类精度提高了1.58%,说明该方法对BT法分类效果有一定的改善。
5 结论与展望
采用PC,BT,HSV,G-S,HPF和WT等6种融合算法对Landsat8全色和多光谱数据进行融合,通过定性、定量以及面向对象方法评估融合影像在干旱区特征地物空间细节信息、光谱信息及地物分类中的效果,得到以下结论:
1)相对原始多光谱影像而言,各融合影像的空间分辨率以及纹理特征均有所增强。
2)HSV法表达空间细节的能力最佳,但其光谱保真度较差,适合于干旱区道路及古湖岸线等特征地物的提取。WT法可最大程度地保持原始多光谱影像的光谱信息,且空间细节表达能力仅次于HSV法,在干旱区Landsat8影像融合中具有较高的应用价值,适合开展对光谱保真度要求较高的工作。综合考虑空间信息量和光谱特征,PC法和G-S法效果适中,略低于HPF法,BT法最劣。
3)从分类结果来看,WT法和HPF法的分类精度相较于原始影像的分类精度有一定的提高,可提升干旱区地物的自动识别能力。
但是,PC法、G-S法、BT法及HSV法的分类精度相对原始影像的分类精度改善并不明显,其原因有待进一步探讨。同时,根据定量评价的结果,后期可结合边缘检测等算法,以期实现道路和古湖岸线等特征地物的自动提取。