石材复合切割机器人的设计与研究
2019-11-27石何斌黄卫清
石何斌 黄卫清
摘 要:该文设计了一种双刀头工具的复合切割机器人,这种机器人具有锯切和水刀切割双重功能,并将水刀安装在蜗轮蜗杆电机上,这样控制水刀可以有效避免锯切和水刀之间的干涉,工业相机将收到的石材拼花图像信息和待切割石板信息传送给视觉检测分析平台,经过分析处理后,在离线编程软件上进行仿真模拟,这样可以得到最优的切割路径、切割方式和切割速度。此石材复合切割机器人配有三切割平台,这样可以减少上下料时间,提高生产效率。
关键词:雙刀头工具;三切割平台;复合切割;视觉检测
中图分类号:TH164 文献标志码:A
0 引言
随着人们生活水平的提高,对石材加工提出了更高的要求,石材拼花在近年来越来越受到广大消费者的热爱,在石材装饰和加工领域,石材拼花使用率是最高的,因为它可以将不同形状的石材组成想要的装饰图案,该领域包括了石材加工艺术、装修设计技术和美学技术,非常有观赏和工艺艺术价值。但是现如今石材拼花加工主要采用传统三轴或五轴龙门、悬臂桥切机进行单一的直线锯切切割或者是水刀切割,该加工方式速度慢、产能低、成本高且难以进行复杂的曲线切割加工。
1 总体结构及实施方案
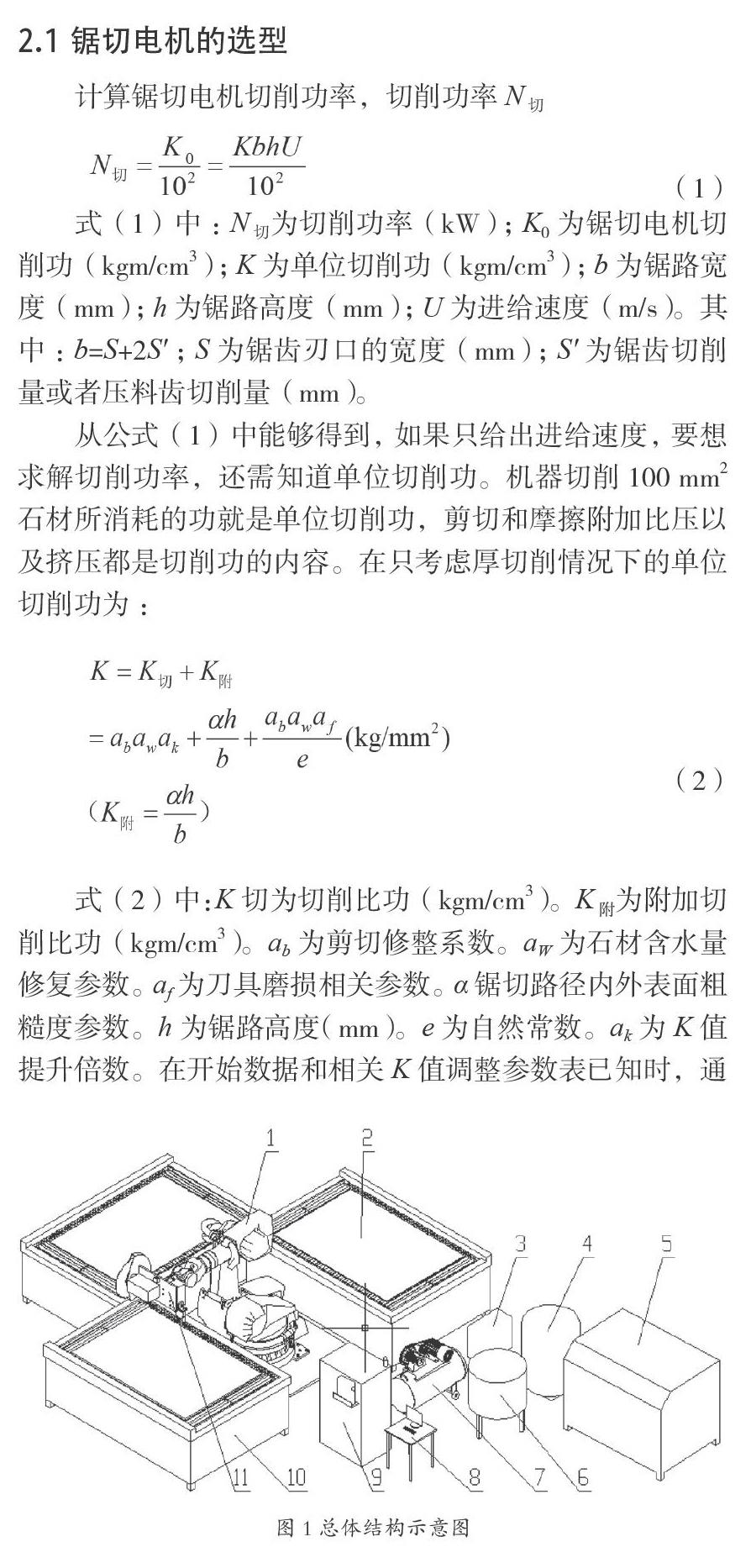
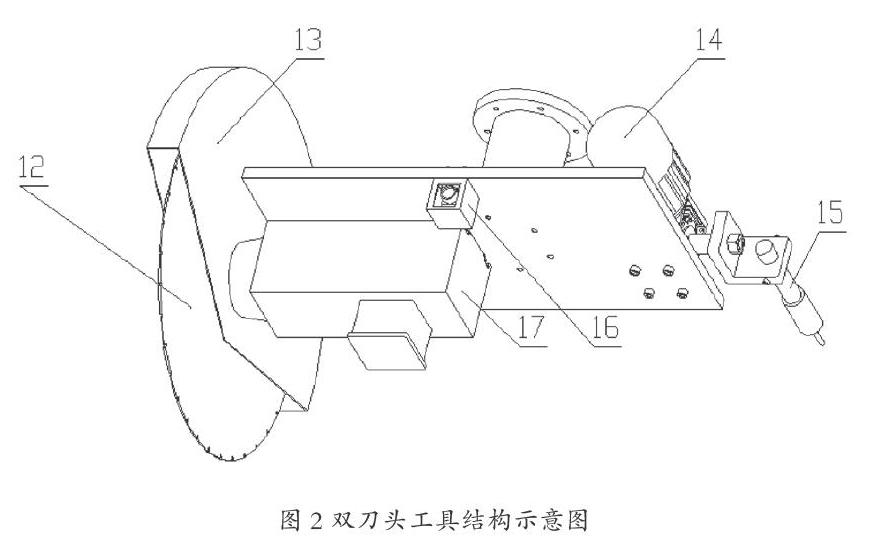
复合切割机器人包括机器人本体、机器人控制器,切割平台、双刀头工具、空压机、供砂机、工业相机、视觉检测分析平台、增压机、冷却塔、供水机。总体结构供水机为冷却塔和增压机供水,空压机为供砂机提供压力。供砂机可以提供不同大小的砂石颗粒,以满足水刀切割时所需要的水流切割压力。机器人控制器控制机器人本体、增压机、蜗轮蜗杆电机开关、锯切电机开关和水切割开关,蜗轮蜗杆电机可以控制水刀的方向,这样可以有效地避免双刀具产生干涉。冷却塔为增压机进行冷却,视觉检测分析平台控制工业相机,将工业相机得到的产品拼花图案和石板在切割平台上的位置信息输送给电脑,视觉检测分析平台上的电脑进行分析处理,并通过离线编程软件进行仿真模拟,进而得到最优的切割路径、最优的切割方式和最优的切割速度,第一个切割平台上的石板切割完成时,机器人将转向第二个切割平台继续对待切割石板进行切割,同时切割完成的一侧切割平台进行上下料,以此往复。机器人控制器精确、稳定,实现自动化高效进行石板切割加工,降低人工成本。采用三切割平台节省上下料时间,进一步提高了生产效率。复合切割机器人总体结构示意图如图1所示,双刀头工具结构示意图如图2所示。
2 机器选型
2.1 锯切电机的选型
2.2 蜗轮蜗杆电机的选型
由于水刀在工作的时候,带有砂石颗粒的水流冲击力很大,因此固定水刀的结构需要有自锁功能,并且在旋转刀具的时候,需要很大的扭矩,速度低,这样才能使水刀安全的工作,不工作时能够精确的达到预定位置。复合切割机器人采用的是蜗轮蜗杆电机,其电机有具备散热效果的凹凸外表面,振动低,温度升高慢,没有噪声,良好的密封性,适应工作环境速度快,该机器核心零部件采用的是耐磨材料,而且受过特殊热处理,具有加工和传动精度高、平稳性好、体积小、承载能力大和寿命长等优势。
2.3 工业相机的选型
复合切割机器人采用维视MV-EM120M/C工业相机,该相机体积小巧,可以适应更为严苛的安装条件;采用千兆以太网接口,理论支持100 m传输距离;采用大型数据包形式传输,减少对中断的处理,性能更加稳定;采用高品质感光器件,较低的功耗及优良的算法,使图像清晰、低噪声、色彩还原度好;支持1路外触发输入,可从IO卡/PLC等设备中获取控制信号,提高图像获取同步性;支持1路信号输出,可随曝光时间或自定义输出;CMOS相机支持AOI/ROI进行局部曝光,并提高采集帧率;支持断网续传功能,在网络断开重新连接时,可自动继续工作;机身自带缓存,支持交叠外触发,帧率更高,丢包率更低; 兼容VisionPro、MATLAB等第三方图像处理软件;全面支持Win8、Win10操作系统。这些特点将会非常有效地处理工业相机拍摄到的石材信息,为后面做复合切割机器人的离线编程计仿真模拟提供了重要数据。
3 仿真模拟
该文主要采用的是俄罗斯的SprutCAM离线编程软件,该软件有许多工业机器人应用模块,例如切割、锯切等。因为SprutCAM软件中只有市场非常常见且应用比较多的机器人,所以首先需要进行复合切割机器人机器库的建立,又因为KUKA机器人只能识别G代码,所以需要编写后处理文件,这样可以将SprutCAM软件生成的程序转化为G代码。先将复合切割加工机器人导入SprutCAM软件中,然后将相应的石板拼花模型和工件材料模型导入进去,选择锯切或水刀切割加工工程,调整工程中机器及工件设定、加工外形或曲面、一般属性、进阶参数、进刀或退刀控制、刀具、转速或进给率、工程转换、刀具路径模板、材料范围、工件装夹等参数,然后进行复合切割机器人刀具轨迹的计算,最后直接生成程序代码。如果在仿真模拟过程中出现撞刀、复合切割机器人姿态不好等问题,可以进行优化,以获得最优的切割路径、切割速度和切割方式。在实际生产过程中,可以通过工业相机及视觉检测分析平台组成的视觉系统扫描石材拼花图案信息的二维码或者可以直接扫描石材拼花样品件得到相应的模型,使每个模型都可以标准化并进行生产,这样在后续的生产过程中可以随时调取直接进行切割加工。
5 结论
复合切割加工机器人与市场上的三轴桥切机和水切割加工相比,复合切割加工机器人加工可以在三维空间实现位置和姿态的任意转换,对自由曲面的复杂工件进行精确的三维切割加工,大大拓宽了加工范围和工艺水平,提高石材切割产量和质量。快速转换切割方式,在不同水压力和砂流量下产生不同切割性能,适应多变的加工环境和要求,大幅度提高劳动生产率,对保障人身安全具有重要意义。
参考文献
[1]晏辉.拼花加工技术[J].石材,1999(12):8-12.
[2]徐凤,邓三鹏,刘钢,等.超高压水射流切割机器人的研究[J].机器人技术与应用,2012(5):38-42.
[3]吴瑞梅,何秀文.机械设计基础[M].北京:北京理工大学出版社,2014.
[4]高玉飞,杨阳.石材的机械加工[M].北京:化学工业出版社,2013.
[5]康志涌.谈高压水流切割技术在建筑装饰中的应用[J].山西建筑,2014(25):124-126.
