基于磁场调制的磁流体动力学角速度传感器*
2019-11-27徐冲柯吴腾飞杨凯丽吴文韬李醒飞
徐冲柯,吴腾飞*,杨凯丽,吴文韬,纪 越,李醒飞
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300027;2.天津工业大学电工电能新技术天津市重点实验室,天津 300387)
高精度航天器,尤其以遥感卫星为代表,在对地观测、深空探测和通讯领域等民用和国防领域都发挥着重要的作用[1]。航天器及敏感载荷存在微角振动,限制了高精度航天器姿态控制精度和稳定性进一步地提高[2]。基于磁流体动力学(Magnetohydrodynamics,MHD)的角速度传感器具有宽频带,低损耗,以及能够在极端环境下工作等特点,尤其适用于空间在轨宽频微角振动的测量[3]。美国ATA公司自20世纪80年代末开始研究MHD角速度传感器,相关型号已应用于美国中继反射镜实验(RME)[4]、日本的陆地观测卫星ALOS[5]和美国的静止轨道环境卫星 GOESN[6-7]等项目当中,但其对我国相关产品禁运,相关技术封锁。2008年,华中科技大学的罗荣峰对MHD角速度传感器的原理进行了阐述[8];2011年,霍红庆、周海佳等人设计了一种MHD角速度传感器的磁路结构[9],并于2018年研究了MHD角速度传感器的灵敏度特性[10]。2013年起,天津大学李醒飞、吴腾飞等人开始对MHD角速度传感器的磁路及结构设计[11]、误差模型[12]、低频拓展[13]以及微弱信号参数估计[14]等方面进行了研究。2014年,北京遥测技术研究所廉杰等人对MHD角速度传感器的带宽进行了研究[15]。2016年,上海交通大学和上海航天技术学院研究了MHD角速度传感器的非线性误差[16]。
为实现空间环境中微角振动的测量,MHD角速度传感器需要具有宽频带和高分辨力的特性,因此带宽和噪声是MHD角速度传感器最主要的技术指标。通过采用磁流体动力泵技术[17]和滤波电路,MHD角速度传感器的带宽可达到<1 Hz~1 kHz,满足空间环境微角振动测量的需求。目前MHD角速度传感器的研究集中于提高其低频信噪比以改善低频性能,以及进一步降低通带噪声以获取更高的分辨力,因此设计一种低噪声MHD角速度传感器是实现上述研究目标的关键。1994年,ATA公司的Pinney C等人讨论了MHD角速度传感器的噪声和漂移指标,但未进一步讨论噪声特性及噪声抑制方法[18]。天津大学李醒飞、吴腾飞等人分析MHD角速度传感器及其信号提取电路的噪声[19-20],发现传感器及电路的低频噪声占主要成分,且包含工频干扰,难以单独通过电路设计进一步降低传感器的噪声。信号调制解调的方法可以有效抑制低频噪声及工频干扰,对于MHD角速度传感器,可以采用磁场幅度调制方式,使传感器输出调幅信号,从而抑制传感器的噪声,提高传感器的分辨力。
基于前期稳定调制磁场驱动装置[21]的研究,本文设计了一种基于磁场调制的MHD角速度传感器,包括传感器磁路及结构设计、信号预处理电路设计和数字解调系统设计。通过有限元方法对磁路进行瞬态仿真分析,分析流体环处的交变磁场强度和均匀性,通过信号预处理电路提取传感器输出的调幅信号,最后使用基于DSP的数字相敏检波技术实现信号的解调。
1 基于磁场调制的MHD角速度传感器工作原理
基于磁场调制的MHD角速度传感器的工作原理如图1所示,上层圆环为封闭导电流体通道,流体通道通过零件装配形成,通道的上下表面为绝缘材料,隔绝其他导体等对流体环的影响,内外面为导电材料,以感应导电流体环内外面产生的感应电压,下部圆柱体为缠绕在磁芯上的线圈,用来产生交变磁场。

图1 磁场调制MHD角速度传感器传感原理示意图
由线圈提供的交变磁场B垂直于导电流体通道,当外壳以角速度Ω旋转时,导电流体相对固定惯性坐标系几乎不动,导电流体相对传感器外壳和被测载体具有沿圆周方向相对速度vq,相当于导体切割磁感线,从而在流体通道内外表面产生感应电动势V,当磁场恒定时,传感器传递函数为:
(1)

V(t)=BWrΩ(t)
(2)
式中:Ω(t)=Ωmcos(ωt)。在磁场调制MHD传感器中由线圈产生的交变磁感应强度为:
B(t)=Bmcos(ωct)
(3)
式中:Bm为交变磁感应强度幅值,ωc为交变磁感应强度角频率,则基于磁场调制的MHD角速度传感器输出信号为:
V(t)=B(t)WrΩ(t)=BmWrΩmcos(ωt)cos(ωct)
(4)
当采取磁场调制方法时,磁感应强度B作为载波信号,输入角速度信号Ω作为调制信号,则传感器的输出电压信号为一个调幅信号。
基于磁场调制MHD角速度传感器测量系统框图如图2所示,由稳定调制磁场驱动装置为传感器线圈提供驱动电流,传感器输出微弱电压信号后,由低噪声放大电路和带通滤波器组成的信号预处理电路对信号进行放大和滤波,同时采用相敏检波技术对信号进行解调。经过信号预处理电路输出电压信号为:
VAMP(t)=KAMPV(t)+n(t)=KAMPKMHDΩmcos(ωt)cos(ωct)+n(t)
(5)
式中:KMHD是传感器标度因数KMHD=BmWr,KAMP为信号预处理电路增益,n(t)为混入信号中噪声。参考信号Vc(t)=Vcmcos(ωct+θ),θ为参考信号相位,则乘法器输出信号VMUL(t)如式(6)所示。

图2 角速度测量系统框图
(6)
式中:K=KAMPKMHDΩmVcm,经过低通滤波器后只剩低频项,输出信号为:
(7)
式中:n′(t)为通带内噪声。由式(7)可看出相敏检波输出信号幅值与参考信号相位的余弦有关,因此在参考信号后加入移相器来调节相位使得解调后信号幅值最大,经过相敏检波后可将噪声中低频成分滤除,只剩高频噪声,从而提高输出信号信噪比。由于实验室转台仅能提供100 Hz以下角振动,因此实验中所测角速度信号频率小于100 Hz,在调制解调的过程中,为了防止信号解调过程中发生混叠,要求载波信号频率要远大于调制信号频率,因此参考信号频率为5 kHz。
2 基于磁场调制的MHD角速度传感器设计
根据上述基于磁场调制的MHD传感器基本原理,可知重点在于设计合理的磁路结构,从而能够在导电流体环处形成峰值稳定、磁感应强度均匀的交变磁场,磁场调制MHD传感器结构示意图如图3所示。

图3 传感器结构示意图
采用缠绕在磁芯上的线圈作为交流磁源,为避免线圈磨损,将线圈缠绕在骨架上,再插入到磁芯中,外壳和磁芯均选用具有较大磁导率、高的饱和磁感应强度和低矫顽力优点的软磁材料,由于处于交变磁场中,因此选用高电阻率的材料从而减小涡流损耗。软磁材料的磁滞回线狭长,磁滞特性不显著,因而在交变磁场中的磁化特性可以近似地用它的起始磁化曲线表示[22]。
通过Maxwell对设计的磁路进行二维电磁场有限元瞬态分析,研究线圈在流体环处产生交变磁场的大小和均匀性,密封装置均不导磁,不导电,不会对磁场产生影响,因此在建立仿真模型时可忽略。为提高流体环处磁场仿真准确性,在流体环上下分别添加求解区域,通过细化剖分网格来提高仿真准确性,仿真模型为如图4(a)所示,如图4(b)所示为对仿真模型的网格剖分图。
在仿真中向线圈中添加呈现正弦变化的绞线电流源,设置线圈匝数,通入频率为5 kHz正弦变化的电流,仿真步长为0.4 μs,同时设置在磁芯和外壳中存在涡流效应,通过Maxwell场计算器可算出交变磁场在流体环处沿轴向方向磁感应强度均值。仿真结果表明当线圈内通入频率为5 kHz,幅值为1 A的正弦电流时,可在流体环处产生正弦变化的交变磁场,磁感应强度频率为5 kHz,幅值稳定在5.53 mT。

图4 传感器磁路仿真模型
为探究设计闭合磁路在流体环处磁感应强度均匀性,选择在某一瞬间进行分析。 图5为流体环处磁场强度分布云图,由图可看出在流体环处可形成较为均匀的磁场,满足传感需求。

图5 流体环处磁感应强度分布云图
3 传感器信号提取及解调方法
当流体环处磁场强度为mT级别时,根据传感器传递函数可计算其输出电压仅为几μV,本文通过设计的超低噪声放大电路和二阶带通滤波电路来对信号进行放大滤波,并采用基于DSP的相敏检波对信号进行数字解调。
3.1 信号预处理电路设计
低噪声预处理电路可有效提取传感器输出微弱电压信号,保证基于磁场调制MHD角速度传感器的低噪声性能。信号预处理电路主要包括超低噪声信号初级放大电路、带通滤波器电路和单端转差分电路。系统电路如图6所示。

图6 信号预处理电路设计
根据弗里斯公式得到级联放大器的总噪声系数[23]可知,若初级放大器的额定功率增益足够大时,整体电路的噪声系数主要由第一级决定。因此在设计中选用具有固定增益2 000倍的超低噪声仪表放大器AD8428作为初级放大器,当增益为2 000时,带宽为3.5 MHz,满足带宽要求。
根据上文可知需设计滤波器中心频率f0为5kHz,通带范围至少为4.9 kHz~5.1 kHz,压控电压源带通滤波器在品质因数小于10具有最佳滤波效果[24],二阶带通滤波器传递函数为[25]:

(8)
式中:Kf为压控增益。
(9)
经计算本文实际设计带通滤波器电路总增益10.2,通带为4 730 Hz~5 256 Hz,中心频率4 993 Hz,因此品质因数为9.5,满足设计要求。
为分析信号预处理电路噪声特性,在TINA中对选用的芯片Spice模型进行仿真,结果表明设计的电路输出噪声电压带宽内噪声占主要成分,当频率小于50 Hz时,噪声衰减大于64 dB,因此通过调制方法可规避放大器1/f噪声和其他低频噪声干扰,提高传感器输出信噪比。
3.2 解调系统设计
基于嵌入式数字相敏检波技术流程如图7所示,主要用高速ADC采集模拟正弦信号,并与采集到的正弦参考信号相作用,通过FIR低通滤波器滤除高频杂波,以数字方式实现相敏检波,从而提取出角速度信号[26]。

图7 信号解调系统流程
本此设计采用TI公司具有高性能32位浮点处理单元的DSP处理器芯片TMS320F28335作为MCU,选用16位AD7656作为模数转换芯片,具有以最大250 ksample/s采样率6通道独立同步采集功能,满足采样需求。
软件流程图如图8所示,使用DSP的PWM输出作为AD芯片数据转换启动信号,改变PWM波频率即可实现对采样频率的控制,本文设计中采样频率为50 ksamples,DSP通过DMA与AD7656进行高速并行数据传输,无需CPU干涉且通信速度快保证了采样带宽,在DMA数据传输中采用存储器乒乓操作防止数据丢失[27],本文在数据处理子程序中采用具有线性相位的FIR低通滤波器对信号进行滤波,利用MATLAB的fdatool工具设计FIR滤波器,将设计的FIR滤波器抽头系数存入到DSP内部存储器中,然后对信号进行滤波,即可获取角速度信号。
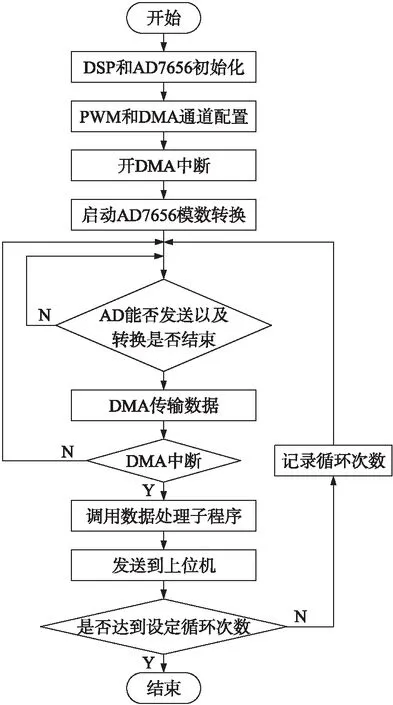
图8 软件主程序流程
4 实验与验证
4.1 磁感应强度的测量

图9 磁场测量示意图
根据仿真结果制成磁场调制MHD传感器磁路结构,将螺线管固定于结构中,由于交变磁场难以准确测量,为验证仿真结果准确性,在本次设计中采用高斯计对固定一点处磁场强度峰值进行测量,如图9所示为采用高斯计对流体环处交变磁场测量示意图,在外壳上打安装孔,将高斯计探头固定在壳体上对磁场进行测量。
实验结果如图10所示,通入线圈中电流可通过串联在电路中电阻间接获取,从图中可看出仿真与实验在数量级上基本一致,但由于在实验中线圈绕线存在间隙以及磁芯磁滞损耗的影响,仿真得到磁感应强度略大于实验值。
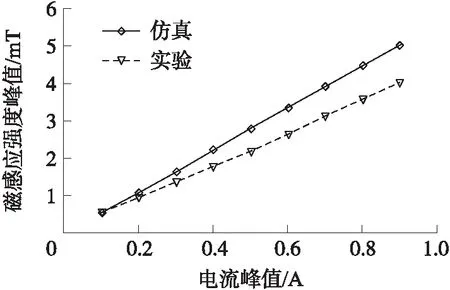
图10 实验与仿真磁感应强度
4.2 信号解调系统测试
由于受到现阶段实验条件限制,本文利用数据采集卡USB-6361的2路AO来模拟预处理电路输出信号和磁场驱动装置输出的参考信号,对解调系统进行测试,解调系统测试框图如图11所示。

图11 解调系统测试框图
图12所示为解调系统测试实验,USB6361产生的调幅信号经由数据采集模块和DSP微控制器组成的解调系统解调后,通过串口传向上位机,用MATLAB对数据进行画图和数据分析,结果表明在AD转换与信号处理传输过程中未发生数据丢失现象。

图12 解调系统测试实验
100 Hz信号调制与解调输出曲线如图13所示,可看出设计的解调系统能对模拟传感器输出信号具有较好的提取效果,解调后信号相对于调制信号存在相位差。为全面分析解调系统性能,比较不同频率和不同幅值调制信号经过解调系统后产生的误差,将解调后信号进行FFT变换分析其幅值和频率相对误差。

图13 100 Hz信号调制与解调输出
从图14可看出本解调系统针对不同幅值和频率的角速度信号具有较好解调效果,频率与待测角速度信号基本一致,相对误差小于0.6%,幅值与待测角速度信号基本一致,相对误差小于0.15%,当待测角速度信号频率较低时,采样时间相对较短,FFT频率分辨率较低,因此频率误差相对较大。

表1 不同频率不同幅值信号的频率绝对误差

表2 不同频率不同幅值信号的幅值绝对误差
5 总结
本文提出了一种基于磁场调制MHD角速度传感器,设计了传感器闭合磁路结构,并用Maxwell对磁路进行仿真,仿真与实验表明线圈在流体环处可产生幅值稳定且均匀的交变磁场。对所设计的信号预处理电路进行仿真,可看出采用调制解调可有效规避放大器1/f噪声和其他低频噪声干扰,从而提高传感器输出信噪比。本文设计的数字信号解调系统能有效提取出调制信号,解调后信号频率绝对误差小于0.01 Hz,相对误差小于0.6%,幅值绝对误差小于3 mV,相对误差小于0.15%。
