基于VPN技术的无人船电站远程控制系统的研究
2019-11-27李坤阳吴志良
李坤阳,吴志良
基于VPN技术的无人船电站远程控制系统的研究
李坤阳,吴志良
(大连海事大学船舶电气工程学院,辽宁大连 116026)
针对无人船电力系统对船舶电站远程控制技术的需求,设计了一种结合VPN技术、PLC控制器以及专用远程控制软件的船舶电站远程控制系统。实验平台基于船舶电站物理仿真系统,选用西门子公司S7-1200 PLC作为船舶电站自动化系统的核心控制器,完成了基于PLC的船舶电站自动化控制程序编程。采用威纶通公司生产的MT8100i与PC作为上位机,并为数据通信搭建了专用VPN数据通道。经实验平台运行测试,验证了该无人船电站远程控制系统运行可靠,实现异地远程控制船舶电站的设计要求。
船舶电站 无人船 PLC VPN 远程控制
0 引言
目前全球航运市场正处在一个产业深层转换的时期,无人船作为目前发展的主流趋势,已进入快速发展阶段,随着各项关键技术不断成熟,航运界新一轮产业革命很有可能以无人船为起点产生。
无人船电站远程控制系统是无人船应用中的关键技术之一,可为全船提供稳定、可靠、高质量的供电系统[1]。在船舶技术飞速发展的今天,船舶电站自动化技术也借助新兴技术的发展正朝着网络智能化、监控远程化发展,通过互联网进行远程控制能够让技术人员在陆地即可对船舶电站进行控制,当系统出现异常时服务商在岸上即可对全船电力系统进行检测诊断,可以有效提高船舶的运行维护效率。
目前中国网络运营商能在我国内河与部分沿海百公里范围内提供可靠的4G移动网络服务,为内河与近海无人船电站远程控制系统的实现提供了可能性。随着5G网络的成熟、Inmarsat的Global Xpress第六代海事卫星通信系统的发展以及美国太空探索技术公司发射的低轨道互联网试验卫星的逐步投入使用,运营商将来能够提供超低延迟的网络宽带服务,在公海也可以满足船舶电站远程监控系统的数据传输要求。本文基于船舶电站试验平台,采用4G网络模拟近海无人船网络状况,通过设计基于PLC的船舶电站自动化系统、船舶电站远程控制系统和专用VPN通道搭建了一套无人船电站远程控制系统,能够通过远程站点实时控制异地船舶电站自动化系统,并经实验测试了其功能。
1 系统组成
1.1 系统软件基础
船舶电站自动化控制软件可同时设置于本地控制平台与异地控制平台,进行数据采集监控与系统控制。控制软件可实现船舶电站发电机组状态监控、机组启停控制、故障报警记录、用户登录等功能。
PLC控制器通过西门子TIA Potral工程控制组态软件采用梯形图LAD编程语言进行硬件组态以及软件编程。使用EB8000 Project Manager组态软件进行监控系统的组态设计,通过ProfiNet端口实现PLC与上位机的通信。
VPN部署方式选择站点间VPN连接,采用动态域名解析技术通过PPTP协议进行连接,整个监控系统可实现实时在线(Stay-on-line)状态,保证远程控制系统连接的可靠性。
1.2 系统硬件结构
系统硬件平台基于大连海事大学电站物理仿真系统,该系统包含两台交流同步发电机组、主配电盘、负载柜和机旁变频控制柜等设备。控制器采用西门子S7-1200 PLC,该型PLC具有集成PROFINET接口、扩展性强、可靠性高等特点,能够满足船舶电站自动化各项功能的设计需求[2]。为了便于系统的使用和升级,上位机采用威纶通公司生产的MT8100i和PC端组态软件。专用VPN通道搭建选用两台X3-3251企业路由器作为站点,支持IPSec安全协议,支持PPTP与L2TP VPN隧道协议,无人船电站远程控制系统硬件结构如图1所示。
2 关键技术
2.1 基于PLC的船舶电站自动化系统设计
采用三台S7-1200PLC作为船舶电站自动化系统核心控制器,其中两台为交流同步发电机组控制PLC,负责对发电机组的电压、电流、频率、有功功率值等参数的采集监控并根据系统需求实时通过变频器与调压器对电机进行控制。第三台为电力系统管理PLC,负责对船舶电站的电力系统状态进监控管理同时控制负载屏主开关、联络屏等设备。船舶电站各参数通过交流同步发电机组控制PLC进行采集,数字量参数直接送入PLC中,模拟量参数经相应变送器处理后送入PLC。本地选用一台X3-3251企业路由器作为结点连接三台PLC,通过建立Profinet网络实现信息共享以及指令传发送。
通过PLC程序设计可实现同步发电机组自动并车、自动调频调载、解列停机等船舶电站自动化功能,船舶电站自动化系统构成如图2所示。

图1 无人船舶电站硬件系统结构
2.2 VPN通道搭建
VPN(虚拟专用网络)对数据包进行数据加密以及地址转换,通过在公用网络上建立专用网络来进行远程加密通信,本设计搭建的专用VPN采用Intranet VPN。由于动态域名分配技术的存在,运营商分配的IP地址并不是真正的公网IP地址,远程监控站点无法直接与本地船舶电站系统组建VPN网络[3]。采用动态域名解析服务器将本地船舶电站系统以及远程监控站点的VPN服务器动态IP地址分别映射到租用的域名地址,通过两个固定的域名地址进行VPN搭建,专用VPN系统结构如图3所示。
VPN服务器搭建选择两台X3-3251企业路由器,采用端到端连接方式,分别作为VPN主站和从站,主站模拟近海无人船状况接入4G移动网,从站模拟陆地控制中心接入有线宽带网络。服务器系统基于linux可进行程序设计实现断线重连功能,支持IETF的IPSec安全协议,具有良好的安全性。在满足本地船舶电站系统以及远程监控站点搭建VPN的同时支持通过客户端增加成员,具有良好的扩展性,系统各站点IP地址信息分配如表1所示。

表1 专用VPN通道各站点配置

图2 基于PLC的船舶电站自动化系统
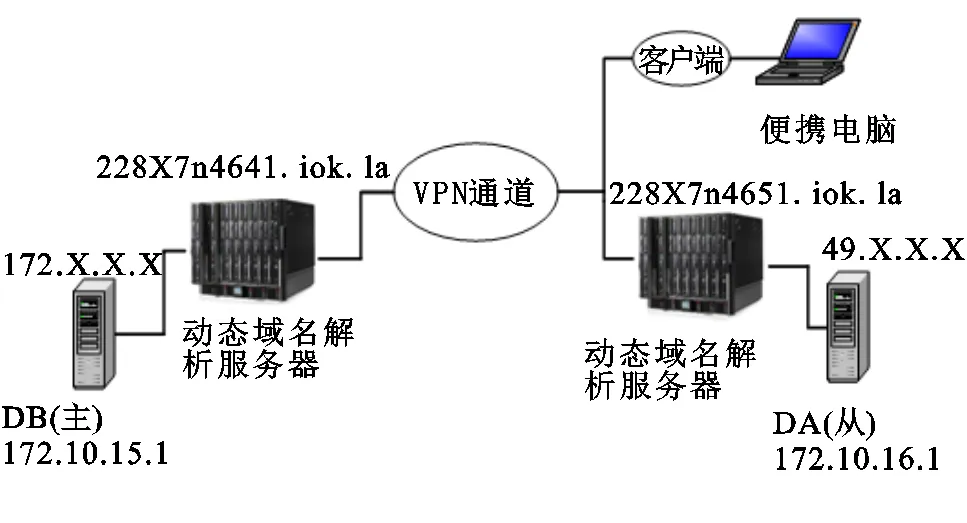
图3 专用VPN系统结构图
船舶电站自动化平台接入VPN主站,三台PLC控制器处于VPN主站内网,对外通信网关为172.10.15.1。与远程控制系统进行数据通信时数据包目的地址为VPN从站子网内控制系统设备的IP地址,VPN主站会将PLC控制器发送给控制系统的数据包重新封包,新数据包目的地址为VPN从站的域名解析地址,VPN从站收到该数据包后会将其解包并确认原数据包目的地址并发送给控制设备,当VPN从站向VPN主站通信时也遵循相同的过程,保证了远程控制系统的数据正常交换。
2.3 控制软件设计
船舶电站自动化控制系统可采用PC与威纶通MT8100i型工业控制屏作为上位机,MT8100i拥有Profinet端口、COM通信端口,具有电源隔离保护功能可在各种工况下稳定工作,同时配合组态软件可与PLC进行直接通信。本设计中控制器S7-1200PLC与上位机设备遵循同一OPC的接口标准配合组态软件进行数据通信。通过EB8000 project manager组态软件获取PLC控制器的相关参数并设计控制界面。PLC与组态软件间通信采用以太网,PLC和上位机IP地址均在172.10.15.0/24网段。
控制软件拥有多个监控界面,包括船舶电站系统状态界面、同步发电机组系统参数界面、船舶电站自动化网络状态界面、发电机组控制界面、系统报警监控界面。主要对船舶电网相关参数、设备状态,以及同步发电机组电压、电流、频率、功率等进行监控,可以完整实现船舶电站自动化所需的各项功能[4]。在各监控界面设计了负责控制相应功能的按钮和和显示系统状态的指示灯,具备较好的人机交互性。控制软件可运行于多台设备,能够实现多地点同时监控操作。启动威纶通MT8100i虚拟网络计算机VNC(Virtual Network Computer)功能时,当异地需要进行监控船舶电站运行状态但未安装控制软件的情况下,可在接入搭建的VPN系统后,在浏览器中输入MT8100i的IP地址与设备密码,即可通过VPN通道将现场组态软件的监控信息实时显示在远程的PC机上,便于在特殊情况进行检修与操控。
系统控制软件同时工作于本地船舶电站自动化系统及远程监控站点,将控制器采集到的船舶电站相关参数进行可视化并监控船舶电站自动化系统运行状态,同时可通过监控界面直接对船舶电站的运行进行控制。
3 系统测试
在完成关键系统设计后,将本地船舶电站自动化系统与监控软件平台以及专用VPN平台进行整合,系统测试以两台X3-3251企业路由器分别作为无人船电站监控系统的VPN主站与从站,主站接入三台S7-1200PLC控制器与MT8100i,从站接入安装组态软件的上位机PC。为验证VPN通道的可靠性与稳定性,分别选择大连、天津、新加坡三地对其进行了多次异地连接实验,其稳定性测试结果如表2所示。

表2 VPN连接稳定性测试表
选择新加坡从站点进行无人船电站远程控制系统功能测试,测试项目选择船舶电站同步发电机准同步并车,无人船电站当前处于2号同步发电机单机组带载运行状态。
新加坡站点远程控制界面对1号发电机组发出自动准同步并车指令,指令信息通过VPN通道传输到无人船舶电站现场。船舶电站自动化系统接收到指令后启动1号发电机组,待其进入平稳运行状态,PLC控制器对电压、频差条件进行判断,系统根据获取的合闸恒定超前时间判断合闸时刻,当合闸时刻到时立刻发出合闸指令,1号同步发电机组完成并车操作[5]。合闸后系统根据电网频率以及获取的两台机组有功功率参数自动执行调频调载步骤,将两台发电机组负载平均分配,并将现场数据反馈到远程监控界面中。经验证系统搭建的VPN通道可靠稳定,通过测试成功验证了本文设计的无人船电站远程控制系统各项功能运行正常。VPN通道通信正常,船舶发电机组电压、电流、频率正常,参数显示两台发电机组在并车完成后顺利实现有功以及无功负载的均分,两台机组有功功率为379.7 KW和381.5 KW,无功功率为172.6 KW和171.2 KW,在误差允许范围内满足系统运行要求,完成测试目标。
4 结论
作为保障无人船电站正常运行的关键技术,本文设计的无人船电站远程控制系统经过多次实验测试,通过采用Intranet VPN可以在保证安全性的前提下有效解决远距离异地数据传输的问题,同时能够保障各种情况下远程控制系统与现场船舶电站自动化系统的正常工作。船舶电站的控制只需要在陆上集中监控室内完成,还可以同时管理多艘船舶电站的运行情况,减少了船舶电力系统运行的成本,提升了船舶电站管理水平。
[1] 吴志良. 船舶电站[M]. 大连: 大连海事大学出版社, 2012.
[2] 廖长初. S7-1200 PLC编程及应用(第3版)[M]. 北京: 机械工业出版社, 2017.
[3] 闫光来, 张卫强, 李维. 基于4G+VPN技术的视频监控系统设计与实现[J].无线电通信技术, 2015, 41(05): 81-85.
[4] 贾秉峰. 船舶远程监控与管理系统研究[J]. 中国水运(下半月), 2016, 16(07): 62-63.
[5] 徐昭, 吴志良. 基于S7-1200 PLC 的船舶电站并车装置的设计与实现[J]. 船电技术, 2014, 34(11): 48-51.
Research on Control System of Unmanned Ship Power Station Based on VPN Technology
Li Kunyang, Wu Zhiliang
(College of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, Liaoning, China)
U665.12
A
1003-4862(2019)11-0061-04
2019-05-08
李坤阳(1995-),男,硕士研究生。研究方向:船舶电气自动化。E-mail: likunyang00@163.com