基于无人机的离散结构自主建造技术初探*
2019-11-27郭喆陆明王祥通讯作者
郭喆 陆明 王祥(通讯作者)
1 同济大学建筑与城市规划学院
2 上海一造建筑智能工程有限公司
随着建筑产业劳动人口拐点的到来,以及对于高效生产、精细化施工和安全作业等需求的逐渐提升,以建筑机器人为代表的装备和工艺的变革也逐步成为我国建筑产业性能化、集约化和可持续化发展的有力抓手和重要支撑。随着近年来国内外相关研究领域的发展,一方面,预制化和装配化的需求带来了以工业机械臂为代表的机器人非在场(Off-site)预制加工技术的广泛发展,同时由于机器人手臂和计算机数控(CNC)加工技术受到预先定义的工作区域的限制,制约了它们可以操作的构件大小,也因此限制了它们的工作范围和可建造构件的尺度[1];另一方面,少数最新研究提供了一种利用移动机器人平台进行现场(On-site)装配作业施工的新思路,通过传感器技术和自动化技术在设计和施工中的整合,现场建造技术不仅实现了效率提升,也通过机器建造与BIM等数字化设计建造流程的整合,有效地提高了现场施工中的精准度和可控性[2]。
无人机(Unmanned Aerial Vehicle,UAV)作为当今机器人领域快速发展的重要载体,也逐渐成为当代现场建造技术研究中的重要对象。无人机的运动特性不受边界制约,使之在整个建造场地上工作成为可能,从而为建筑师实现其设计提供了一个新的技术框架[3]。而小型无人机的载重范围、作业时长等客观约束,也带来了对于相关建筑构件系统设计的特殊要求。
本研究从无人机现场自主建造技术的角度出发,结合实验性的无人机智能协同离散单元建造装置的设计研究和建造试验分析,尝试对以无人机为代表的现场移动建造技术体系进行初步探索,以期为相关研究的后续发展提供有意义的理论和实践基础。本研究依托同济大学第九届Digital FUTURES数字设计国际工作营,提出并实现了一种适用于快速灵活建造的建筑形式原型,建立和完善了关于离散多面体结构的形态设计方法、建造时序控制以及适合无人机的结构细部、建构策略等关键技术,最终完成了由18个菱形正十二面体的铝板弯折构件堆砌完成的高1.5m的建筑装置。建造过程全部由两架F450规格自组装四旋翼无人机自动化完成,从现场飞行准备到砌筑成形共耗时5h,其工作流程和建造原型具有较强的拓展性,为大尺度离散结构的现场无人机装配技术发展提供了有效的技术保障。
1 背景研究:移动机器人与现场建造
20世纪80年代以来,建造技术中自动化程度的大幅度提高带来了大量机器设备在建筑工程中的应用。数字建造以一种新的方式为建筑师提供了一种全新的建构哲学:数字孪生技术的发展使建筑的设计规划与最终实施更为紧密地结合为一体,一方面为大量数字计算性形态的建造提供了可能,另一方面也使建筑师可以更好地在设计中对诸如精度控制、建造时序、材料浪费和人员安全等问题进行优化控制[4]。
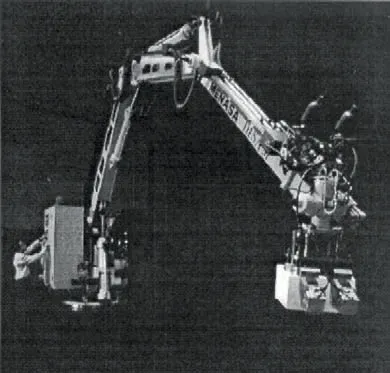
1 基于移动机器人的现场建造案例:ROCCO 砌砖机器人
2 基于移动机器人的现场建造案例:BRONCO 砌砖机器人

3 基于移动机器人的现场建造案例:DimRob 多功能现场机器人

4 基于移动机器人的现场建造案例:In-situ Fabricator 现场机器人

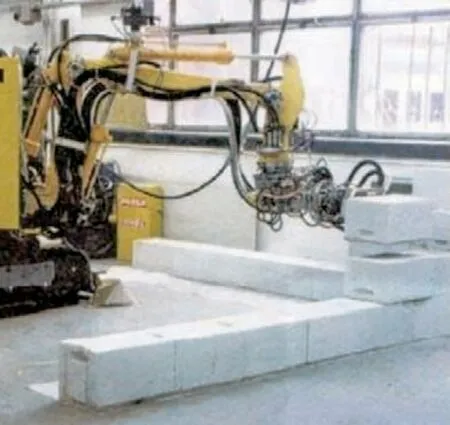
5 无人机现场建造案例:无人机磁力连接构件搬运
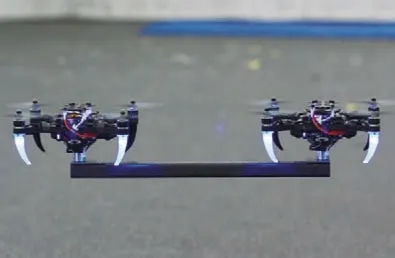
6 无人机现场建造案例:双无人机协同搬运建造

7 无人机现场建造案例:无人机编队砌筑

8 无人机现场建造案例:无人机离散单元构件建构
当前数字建造技术的发展对建筑产业应用的广泛影响更多地体现在非在场(Off-site)的数字预制化生产中。大量装配式、机器人技术的发展仍然表现在基于某些小型的、专业工艺的自动化开发中,而与之相对的,机器在场的、整体自动化装配的现场建造技术则代表了一种全面的、综合性的数字建造技术的发展方向。
移动机器人作为现场建造技术的重要载体,在20世纪90年代初开始出现在一些实验性的现场建造研究项目中。作为传统建造技术的自动化升级和机器人实现,部分代替传统作业的移动式机器人建造平台在建造速度和效率等各方面展现出了优势。如欧洲早期的“ROCCO”和“BRONCO”移动机器人建造研究项目[5,6],实现了传统砌筑工艺全过程自动化的技术创新(图1,2)。面对早期的现场建造移动机器人平台只针对传统标准化作业技术和非常严格的建造工艺流程等限制,以瑞士苏黎世联邦理工学院“DimRob”(图3)为代表的研究在20世纪初广泛展开,通过移动端和建造端的分离,利用可更换的机器人工具端来实现多种工艺的机器人集成[7]。近年来,移动机器人平台的现场建造更加关注于现场建造机器人的全自动化实现,以瑞士“In-situ Fabricator”等(图4)为代表的移动机器人建造项目从传感器集成、系统设计等角度展开广泛研究[8]。
无人机作为当前机器人领域的重要媒介之一,在传统的移动建造中大量应用于复杂高危场地的材料构件运输等领域,同时也主要依赖于操控飞行员的主动控制,而近年来对于无人机自主建造的相关研究也在自动化领域逐步展开。随着无人机定位、控制和协同作业技术相关研究的逐步成熟,2011~2012年间,美国和瑞士相关团队相继完成了以磁铁为连接的简单梁柱系统的无人机建造(图5)以及多无人机编队协同完成的搬运研究(图6)[9,10];2014年,以搬运、砌筑为代表的无人机建造项目“The Flight Assembled Architecture Installation”(图7)在瑞士完成,用4台可不断起落的无人机编队以及1 500个定制的轻型泡沫砖完成了一个6m高的塔形自由形态结构的建造[11];2018年,比利时鲁汶大学展开无人机在真实尺度建造中的实验性研究,提出了一种类乐高砌块的整体建造策略[2];同年,德国斯图加特大学利用杆件建构的多面体结构,通过电诱导磁铁吸附等连接技术,完成了一个可反复现场拆装的无人机自主建造装置(图8)[12]。本研究在以上研究的基础上,提出了一种适合建筑师使用的无人机建造策略和系统架构,并以自由多面体剖分为例展示了相关无人机自主建构的关键技术。
2 无人机自主建造的系统搭建
2.1 系统框架
无人机系统运动控制的复杂性远高于地面固定的机械臂数字建造系统,因此需要多终端、多传感器的协同运行。本项目将机器人路径规划平台与机器人运动控制平台分离,除在数字建筑设计中常用的Grasshopper平台之外,引入ROS开源系统(Robot Operating System)[13],实现Windows和Linux操作系统之间的连接,通过建立ROS模块和Grasshopper之间不同软件平台的通信与数据转换方法,搭建适用于无人机建造复杂场景的自主建造技术框架(图9)。
完整的无人机自主建造系统由无人机空间位姿反馈和地面站轨迹规划控制两部分组成。在位姿控制部分利用无人机控制领域常用的开源PX4解决方案,利用机载的姿态传感器(陀螺仪、加速度计)、磁力计、气压计和空速计等传感器系统,综合处理无人机实时的局部姿态信息。全局定位控制采用了基于光学红外相机的动作捕捉系统(项目运用Nokov动作捕捉系统),代替室外常用的GPS定位系统对无人机的实时位置进行跟踪,以满足室内无人机稳定悬停的作业需求,同时将无人机坐标信息传回地面站计算机的可视化界面反馈。整套控制位姿反馈和控制系统以黑箱的方式为设计师现场进行的自主控制提供必要的基础服务。
轨迹控制部分利用无人机搭载的基于树莓派硬件的ROS系统作为数据传输媒介,在Grasshopper平台下开发了相关的可视化和通信插件,把软件中规划的建造路径和投放点的时空数据传输给无人机,以实现现场实时控制(图10)。
2.2 无人机构造设计与调试
无人机运动的特殊性对无人机现场技术提出了基本的设计约束。由于无人机的飞行控制是一个全动态的运动控制,在复杂的现场建造环境中,传感器精度、施工高度带来的地面效应和结构工件的特性都会影响无人机的实时运动,从而难以实现毫米级的稳定悬停。因此,无人机建造系统的首要设计问题是无人机构造的改进,以允许一定的误差。在本研究中,无人机机架是在F450机架的基础上改进而成的,通过可调舵机驱动下的可开合夹取工具,实现了2cm误差范围内的可调节抓取工具端(图11,12)。
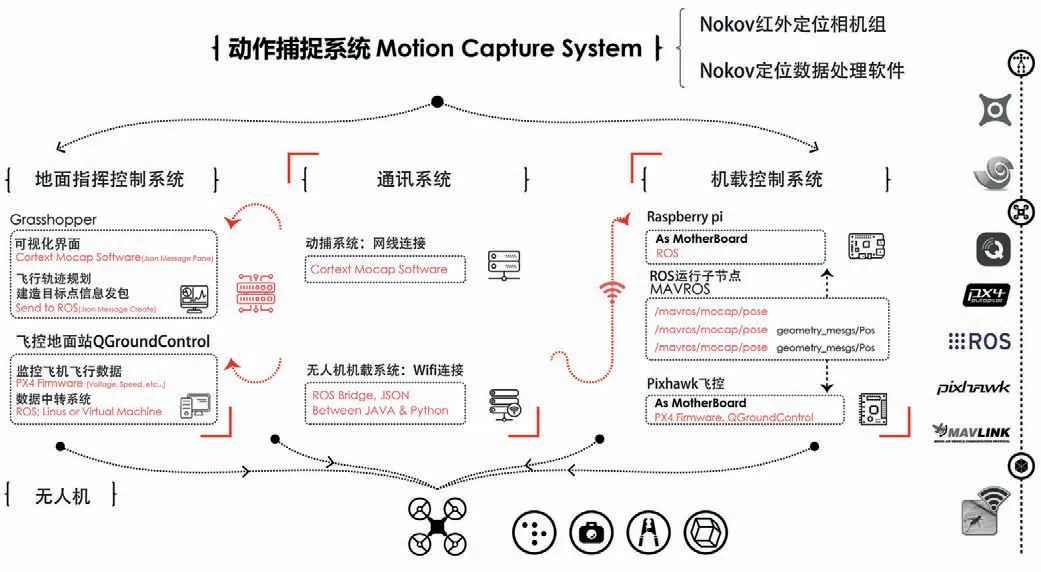
9 无人机自主建造系统框架

10 复合平台协同操作界面
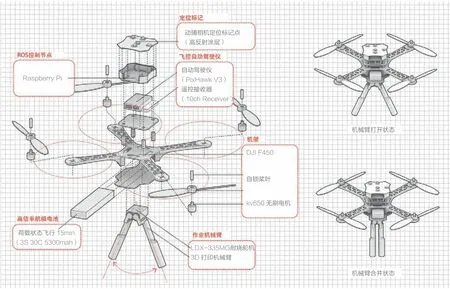
11 自组装无人机构造
12 机械臂设计

13 无人机现场工作环境搭建
2.3 现场工作环境建立
本研究试验中的完整工作环境由一套红外光学动作捕捉系统、无人机起落架、送料口、充电器、安全网等(图13)。装置建造试验选在同济大学建筑与城市规划学院地下一层展厅,展厅层高2.5m,试验区域面积约为5m×6m,共使用了8个红外动作捕捉相机组成定位系统。不过受实验场地和设备数量制约,无人机实际工作区域为2.6m×2.4m×1.7m,8个红外定位相机在限定区域内均匀分布悬挂于展厅吊顶之下300cm处。
3 适用于无人机建造的离散建构设计研究
3.1 空间镶嵌整体形态设计
无人机的载重条件和供电条件限制了其在需要长时间作业的连续体建筑建造中的应用范围,因此在本研究中,无人机自主建造的结构可能性被认为是一种基于轻构件体系和有效连接体系的离散结构。研究从基本空间镶嵌(Spatial Tessellations)的几何学原则入手,对标准多面体空间镶嵌的几何原则进行了归纳(图14),选取了形态较为复杂的菱形正十二面体作为基本建造单元进行形态设计。
该多面体的空间连接拓扑形态可能性较为复杂,同时能够创造上下两层在堆叠建造过程中形成的结构凹口,从而为后续的砌体提供稳固的受力支撑,为建造过程增加定位冗余度(图15)。
几何形态的基本设计原则通过多面体镶嵌对于空间曲线和曲面的几何拟合算法进行运算生成。利用简单的多代理算法,对多面体的组构过程进行相应的模拟,从而可以对任意的空间曲线和曲面进行带有合理建构次序的生成过程分析。该建构方法综合考虑了离散结构的基本几何组合模式以及建造过程种动态的整体稳定性问题,非常适用于无人机的空中作业特点,结构通过多种曲线和空间曲面的生形拟合后,最终选取螺旋面作为基准曲面的构造形式,围绕中心轴依次错位向上堆叠形成最后的装置形态(图16)。

14 一些标准空间镶嵌的多面体

16 结构设计选型
3.2 离散单元设计
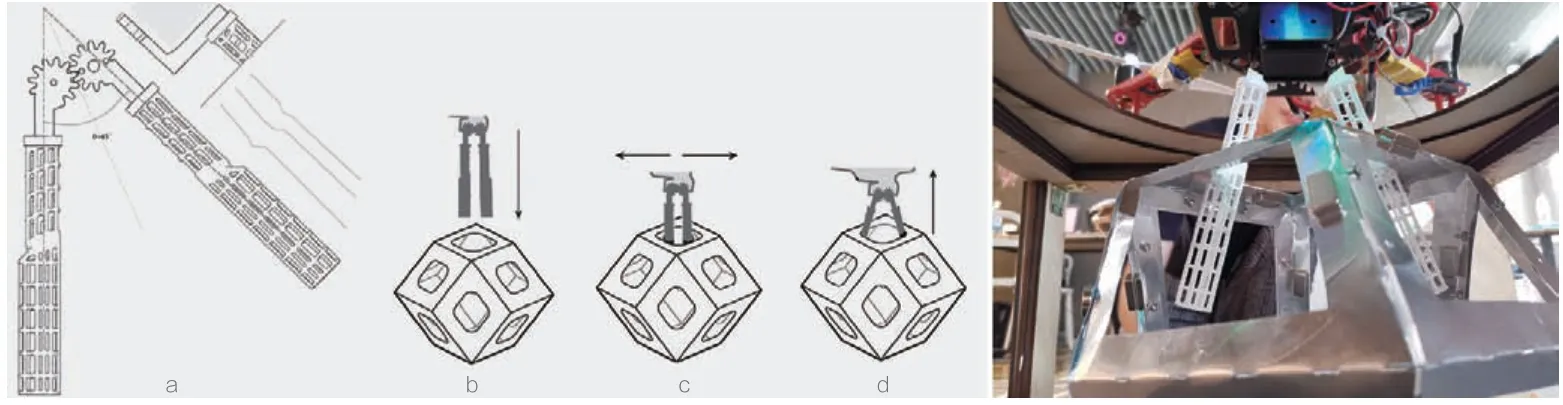
试验中的离散单元体用0.4mm铝板激光切割制作,通过沿棱边的弯折,利用直径15mm、厚4mm的沉头磁铁加M3螺丝、螺母固定成型(图17)。单元体之间的连接由对偶面上的四个沉头磁铁正负极相接(图18),通过正负极的分布设计来有效地将建造过程中的容差控制问题和结构体系的连接节点构造问题进行整合处理。无人机机载的砌块在靠近目标点的3cm范围处会因磁力作用自动完成快速定位,这一节点的设计有效弥补了无人机室内定位精度的阈值问题。同时,为减轻砌块重量并且保证结构底部的稳固性,共设计了4种表面菱形开洞尺寸,由下至上依次增大。顶面开洞根据机械臂夹取结构的特征进行了倒圆角操作的设计,以便无人机可以完成稳定的抓取和投放。
4 无人机现场自主协同建造技术
轨迹规划对于协调多台无人机执行砌筑任务至关重要。在本研究中,相应的自主建造的路径规划部分独立于飞行控制模块,通过Grasshopper界面中的计算性设计,直接由设计师完成实时控制。
在此系统中,无人机的建造轨迹根据结构体的生形规则自动生成,可以满足快速的造型修改需求。路径轨迹分解为多个空间点坐标,在Grasshopper可视化界面中计算完成。这些目标点坐标以全局坐标信息的格式,通过ROS平台上的位姿控制模块为无人机运动下达指令。在这一过程中通过Grasshopper运算器的处理,空间点坐标转换为带有时间戳的数组,包含无人机的空间坐标信息和姿态角度信息,通过系统间的通讯实时地在飞行控制模块中指导无人机运动的调整以及在可视化模块中进行对无人机的模拟展示。
由于无人机的运动是通过4个旋翼的电机转速进行控制,因此无人机在各个方向的飞行运动存在一定差异。由此,无人机建造的动作路径规划既考虑了最终构件的摆放位置,也考虑了最终摆放过程中运动控制的稳定性。无人机从起降台上夹取砌块后接到起飞指令,在空中沿着既定的飞行轨迹抵达目标投放点的垂直上空,之后在保证平面位置情况下以三段减速的方式完成下落过程,并且在目标点位上空150cm位置保持短暂悬停,进行放置动作后返程。
由于实验空间的限定,若采用两架飞机同时起飞的协同方式会因飞行中强烈的气流干扰,造成无人机在自身稳定定位调整过程中误差不断累计。在本研究的双机协同策略中,两架飞机的路径规划沿左右两侧分别布置,保证了路径的相互避让,其中一架完成砌筑作业后返回起落架关闭动力系统,另一架同时启动飞行程序。如此交替的协同建造策略可以保证在一台无人机更换电池期间另一台可以不间断建造,也可以保证一台无人机在飞行中不会受到气流干扰(图19)。
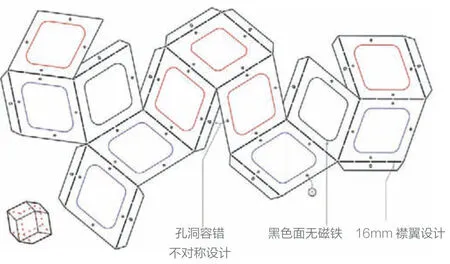
17 砌块展开示意图
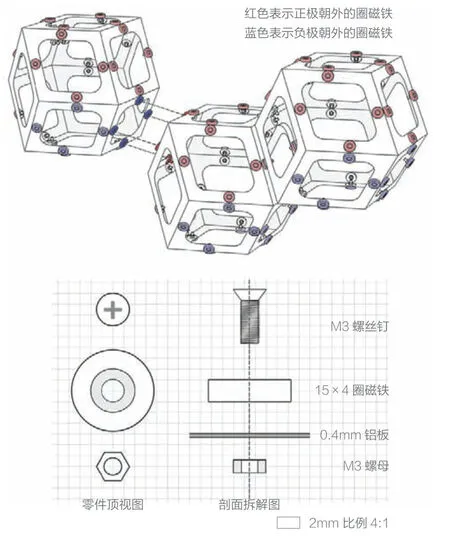
18 对偶面磁铁正负极连接与构造节点大样

19 双机协同交替飞行作业示意图

20 无人机砌筑过程记录
无人机在飞行过程中的实时位置和航向状态会在软件可视界面中显示,此可视化信息结合地面站监控的飞机位置数据,使建造的全过程信息得以保存和实时反馈。根据结构设计中的砌筑顺序等分析,相应的建造摆放的飞行路径被转化成一系列的实时控制指令,最终实现了整个结构体系的无人机全过程自主砌筑(图20)。
5 讨论与总结
在以移动机器人为代表的现场建造研究背景下,本项目建立了基于室内动作捕捉系统的适用于建筑学研究和试验的无人机自主建造实时控制系统和可视化界面平台,验证了无人机用于离散化结构建造的能力,同时利用空间镶嵌原则提出了适用于无人机砌筑的整体结构形式和离散单元体形式,这一系列成果都为空中集群智能体自主建造提供了进一步研究的思路和方法。
然而,该项目在无人机载重、续航以及用于标准建造场地的定位技术方面仍有一定局限,很难直接应用于现有的真实建造尺度和场地。为了使空中建造在现实建造场景中得以实现,后续研究的方向将探索如何结合飞行器在空间中灵活的可达性,以及相关传感技术的整合与应用,探索更加具有可应用效益的无人机现场建构方法。同时,还需研发新的材料系统和施工工艺,以解决无人机系统本身和环境干扰施加的限制,例如在有效减轻荷载的同时提高整体结构强度,同时保证离散结构定位的精度等。最重要的是,通过整个跨学科的数字建造研究,我们也更加深刻地体会到,这项研究的成功注定意味着打破建筑师固有的工作模式,需要持续与多个学科的专业研究团队进行密切合作。
