立式自行车循环停车机械装置的设计
2019-11-22张安胡碧强向诗豪
张安 胡碧强 向诗豪


摘 要:以便捷、实用、高效的解决因车位少车子乱停乱放问题的设备为研究对象,提出一種沿轨道立式循环框架结构,再结合偏心轮,制作成可稳定停放自行车的机械装置,实验结果表明,该设备工作稳定,性能可靠,功能实现效果良好。
关键词:立式循环;链传动;偏心轨道;简易停车
面对社会上自行车车位少、乱停乱放的问题,我们以节约占地面积,提高空间利用率,车辆集中停放为设计目标,决定采用立式循环集中的停车装置。该装置高约4.7米,宽约1.1米,长约2.3米,最大停车量为6辆,利用空间资源,减少水平占地面积,工作稳定,性能可靠,功能实现效果良好,能节省大量的可使用空间,提供更多的停车位,并且它还有着人性化设计、操作轻便等优点,可使其空间资源利用最大化,适合在城市小区中集中推广。
1 整体方案设计
图1立式自行车循环停车机械装置将传统平面停车方式变换为三维空间内的停车方式。如图1,建立双循环轨道,利用链条牵引传动,使停车架在循环轨道中运行平稳,并依靠偏心轨道,使其强制处于水平。该装置主要由双循环轨道、滑块、停车架、整体支架、链条五部分组成。
采用立式循环方式停车,减少占地面积,极大增加空间利用率,停车架通过滑块在轨道上实现循环运动,方便车子存取,将双偏心导向轮、双平行循环轨道、滚轮滑块、停车架、人工机械传动应用于立式自行车循环停车装置设计中,由人力驱动链轮,经多级调节实现能够通过人工轻便的将装置运行,停车架与滚轮滑块通过轴孔配合,满足滚轮滑块沿双平行循环轨道滑动且能保证停车架水平稳定停放车子,双偏心导向轮由平行于双平行循环轨道链式连接传动,停车架导向牵拉杆固连与链式循环,与滚轮滑块等速循环,防止因自然因素引起的轴孔链接产生不稳定因素。
2 机械结构设计
2.1 循环轨道的设计
图2如图2该结构主要类似过山车轨道,建立相同的圆柱面轨道,使滑块和轨道相互配合,从而达到沿轨道移动的效果。在能实现结构功能的情况下,加工方便,经计算强度刚度满足要求,并且方案符合实际情况。
2.2 停车架的设计
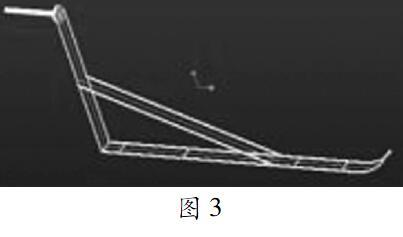
如图3所示,将停车架设计成宽70mm的支撑架,在支撑架前后都有相距300mm嵌位钢杆,可以将自行车前后轮恰好嵌位在里面,两对嵌位钢杆相距1000mm能满足绝大部分自行车稳定停放,且经计算此方案能满足强度需求。同时圆柱状部分与滑块相互配合,使其在滑块中能够相对转动,从而使其始终处于竖直状态。在圆柱端面处有一卡槽,可使其与偏心轨道链条相互连接,进而强制保证其竖直状态,连接可靠,运行平稳。
2.3 传动方案的选择
对于该装置,考虑到使用环境较多,较为复杂。同时对于该装置功能性要求,因需与滑块进行固定连接,运行需要较为稳定的速度,相对各滑块之间距离相同,各定位点的固定性。综合考虑,进而选择特定链条多级传动传动装置。该传动方式,不仅传动平稳,性能可靠,并且可对链条链片进行特制加工,改换部分与滑块连接链片,从而达到所需结构功能。
2.4 滑块设计
对于滑块整体需要满足与循环轨道的紧密配合,但对于圆柱状空间椭圆曲面的配合存在较难以处理的问题。如图4为原选用的三点固定,原选用三点相互固定的装配关系,但对于轨道圆弧部分和竖直部分,滑块滚轮相互距离不同,三点固定无法达到较好的配合。故最终选取图5的滑块方案,对原有的三点固定配合变为现有的四点配合,相对原有三点固定装配更加稳定。但因为在轨道圆弧部分与竖直部分的尺寸差异,故尽量使四点之间距离相互较近,否则易产生装配关系的突变性。
3 工作原理及性能
3.1 工作原理
(1)采用立式双平行环道循环停车,实现占地面积的极小化,空间利用率的极大。
(2)利用偏心轮进行竖直方向牵拉,使得停车杆始终保持水平状态。
(3)使停车架得双轨道与四组滚轮滑块通过轴孔配合,减少停车架局部受力,将停车架所受压力均匀分布在平行停车轨道上,满足滚轮滑块沿双平行循环轨道滑动且能保证停车架水平稳定停放自行车。
3.2 性能
占用有限地面空间,利用空间高度,在有限的面积停放6辆自行车。利用偏心轮在竖直方向牵拉,不单是利用重力而保持停车架水平,双重保险使性能更优。
4 结论
我们小组设计的作品新颖,丰富现阶段自行车停放方式的单一性,制作立式可循环停车装置,可应用于城市住宅小区等场所,方便大众日常生活,提供其在城区各地的停放,不仅节约占地面积,而且能够增加空间利用率,在有限的占地面积情况下停放多辆车子。所设计结构简单美观,为城市增添一份美丽。
参考文献:
[1]濮良贵,陈国定,吴立言.机械设计[M].第九版.高等教育出版社,2018.9:134-142.
[2]张东生.机械原理[M].重庆大学出版社,2018.1:145-178.
[3]王强.机械原理课程设计指导书[M].重庆大学出版社,2018.1:84-90.
