高速铁路信号中继站智能巡检系统
2019-11-20高亮孙翠玲张志成
高亮,孙翠玲,张志成
(中国铁路北京局集团有限公司 唐山电务段,河北 唐山 063000)
高速铁路信号中继站设备巡检每月1次[1],需要维护人员到现场通过感官来完成,针对无人值守信号中继站的设备巡检存在交通不便、维护成本高、交通安全隐患大、实时性差等问题,提出利用网络化、智能化、信息化、大数据和先进的管理手段代替传统人工巡检,研发智能化巡检系统完成无人值守信号中继站的自动巡检和大数据分析工作,代替和减少人工巡检,以达到降低维护成本、提高劳动效率、减少交通安全隐患和对故障进行有效防范的目的。
1 智能巡检系统设计原则
智能巡检系统要实现替代人工巡检的功能,并需满足高速铁路对安全性、可靠性、创新性、维护便利性等多方面要求,应遵循以下原则进行设计:
(1)执行国家或相关部门技术标准。系统应遵循GB/T 8567《软件工程国家标准》、GB 50194—1993《建设工程施工现场供用电安全规范》、GB 50174—1993《电子计算机机房设计规范》、GB/T 368—2001《入侵报警系统技术要求》等标准和规范进行设计和实施。
(2)安全性原则。巡检系统不与既有信号设备接口,不影响既有设备正常工作[2]。巡检系统在任何不良状态下,不能影响被监测设备的安全运行,巡检系统能够稳定、可靠运行并在被监测设备存在异常时提供报警信息。
(3)实用性原则。智能巡检系统能够替代日常的人工巡检,系统具备远程下达巡检计划和实时人工启动机器人功能,安装在现场的机器人按照计划定时进行信号设备巡检和环境状态监控,发现异常时通过图像特征识别和大数据比对,在远程终端进行报警提示、异常设备视频图像的传送。系统还应具有人员、异物入侵及温湿度超限等报警功能,为信号机房无人巡检和压缩故障时间提供平台。
(4)网络化原则。系统所采用的技术、规范、标准应符合当今巡检机器人的发展方向,具备网络化、模块化、大数据分析、可扩展升级的特点。对于监控系统的非核心部分,考虑使用成熟技术,以提高系统的可靠性和安全性。
2 系统总体方案
目前,智能巡检系统的巡检机器人按导航方式分类,主要分为激光导航、磁导航、吊轨等方式,中继站箱式机房信号设备的安全性和特殊性对导航方式确定至关重要。激光导航容易受外界干扰、存在偏离规定路径的隐患,非正常状态下存在撞击信号设备、导致行车事故的风险;吊轨机器人对屋顶结构有特殊要求,若不达标则易引发漏水、坠落,影响既有信号设备;磁导航具有安全稳定、不易受干扰、行走路线栅格固定[3]、扩展灵活的特点,缺点是巡检点位固定、通用性不好,每个机房数据需单独设定,更考验软件的研发能力和硬件精度。结合中继站信号设备安全性的要求,通过充分的论证,决定采用安全性能高、技术成熟稳定的磁导航和无线射频识别(RFID)传感定位技术[4]。
对于电源供给方面,考虑到无人值守和接触式充电可能存在电火花、接触电阻变化等带来的消防隐患,机器人采用非接触式充电方式,消除了充电时接触火花和大电流带来的火灾隐患,进一步增强了系统的整体安全性。
因智能巡检机器人不能同时完成中继站环境监测(温湿度、烟雾报警、水渍)、电缆入口和箱门外物入侵监测(不明人员、老鼠等)功能,因此系统采用模块化设计,将环境监测、外物入侵监测单独作为子模块进行设计,采用无线网络与系统服务器进行数据交互,简化了软、硬件系统的研发和实施难度。
3 系统功能与实现
信号中继站智能巡检系统主要由巡检机器人子系统、防入侵安防子系统、环境检测子系统和中央服务器4 个子系统组成(见图1)[5]。
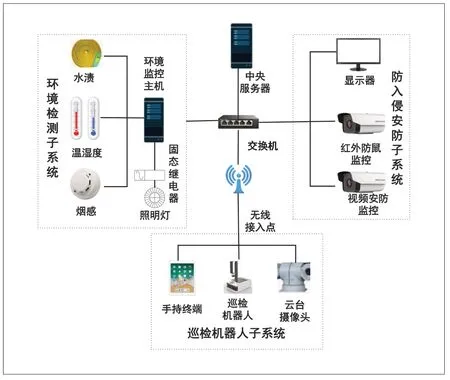
图1 智能巡检系统组成
3.1 巡检机器人子系统
巡检机器人子系统是系统的核心,安装预先设定的走形轨迹和RFID 定位以进行巡检、定位摄像,将数据通过无线局域网(Wi-Fi)通信方式传输给服务器,服务器与原始图像进行对比后进行判定和报警。子系统主要组成部分包括:智能巡检机器人、接口通信层、功能服务层和应用层(见图2)。接口通信层主要是通过无线网络设备,实现与中央服务器的信息、指令、自检状态信息的交互,系统预留与集中监测接口条件,满足集中监测是信号维护人员统一监控平台的要求[6];功能服务层围绕作业内容,为应用层提供数据支撑;应用层提供可操作的人机界面,完成各项管理、数据查询、远程控制等功能。
子系统硬件部分由巡检机器人、升降机构以及安装于升降机构顶部的高清云台摄像机组成。巡检机器人主要组成包括:巡检机器人驱动系统、巡检机器人自动充电系统、巡检机器人无线网络通信系统、巡检机器人路径跟踪与精确定位系统、巡检管理系统。巡检机器人见图3。
巡检机器人通过图像识别技术实现信号指示灯状态监测分析[7],将检测结果形成高清图片,并智能转换成数据记录,上传到服务器。机器人在巡检过程中,当发现分析比对结果异常时会在终端生成报警信息,通知信号维护和分析人员。升降机构采用直流无刷电机作为动力驱动,输入电压为DC 24 V,采用编程逻辑控制器(PLC)实现对机器人运动控制及信号的处理。同时结合RFID 闭环反馈,实现位置的精确定位。机器人内部CPU 对电池、RFID 管理及电机驱动均通过RS485 通信总线实现,其工作原理见图4。

图2 巡检机器人子系统组成

图3 巡检机器人
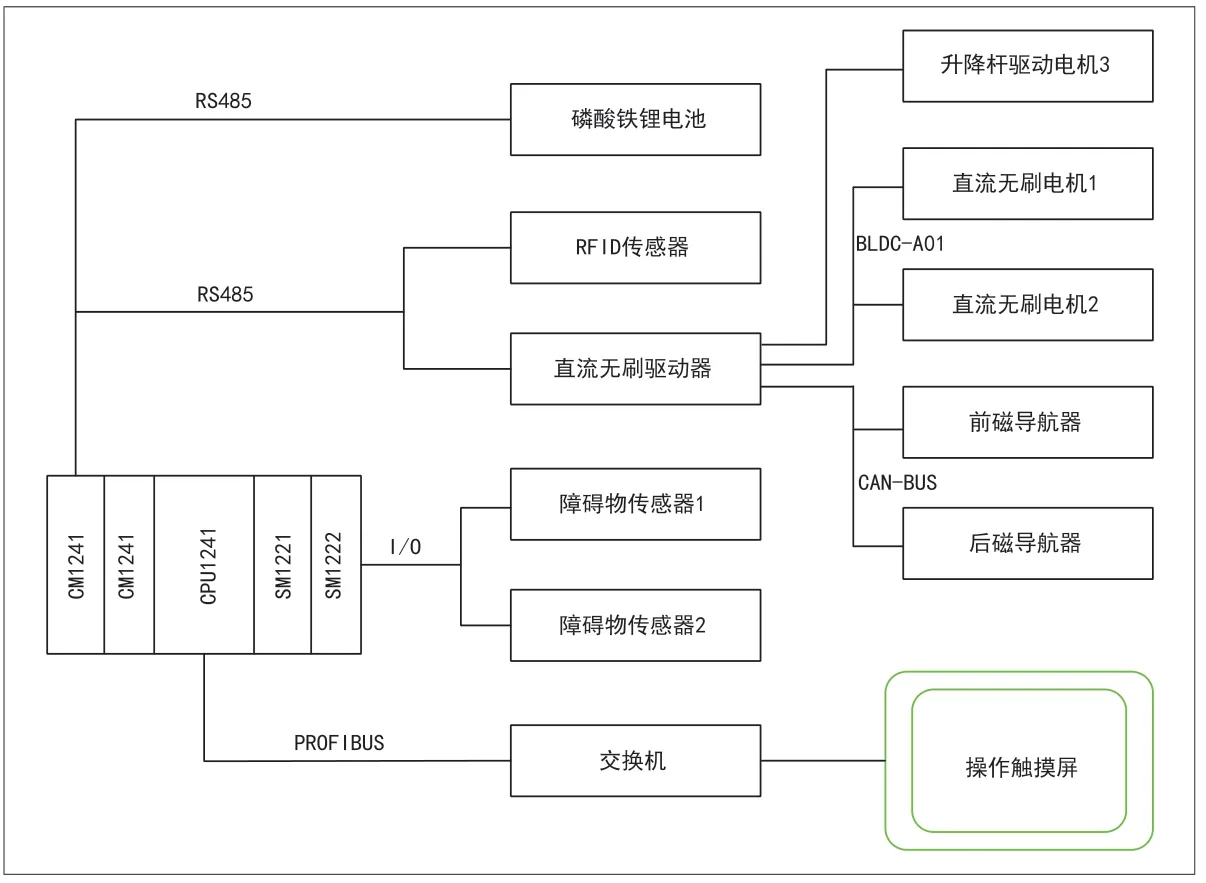
图4 巡检机器人工作原理
巡检机器人子系统能够完成以下主要功能:
(1)系统自检。巡检机器人开机启动后自动检测软、硬件及网络连接状态,均正常后方处于待机状态。接收巡检任务动作前,程序自动检测电池电量、所处位置、伸缩杆定位高度,均正常后开始自动巡检工作,防止因程序执行、传感器偏差导致的误报警。
(2)自动巡检。巡检机器人按照预先设定的巡检内容、时间、周期、线路进行自主启动和完成巡检任务,生成巡检报表。自动导航定位误差不大于±10 mm,运行最大速度不小于1 m/s。行走过程中遇沟槽、下落台阶等情况时,能及时停止运行并报警,并具备爬坡能力,最大爬坡能力不小于3°。
(3)手动巡检。利用操作和分析终端可切换为手动巡检模式,在此模式下可任意选择需要检查的机柜和检测点,并可手动控制云台摄像机的视角。
(4)存储、回放。具备10 d 巡检记录、视频回放功能,能够对数据进行转存。
(5)自动避障:巡检机器人采用定点、定径路走行方式,并有自主避障功能。在自主行走过程中正面遇到障碍物(高150 mm×宽100 mm)能及时停止,障碍物移除后能恢复行走。自动导航重复定位误差不大于±10 mm,在1 m/s 运动速度下,制动距离不大于0.5 m。
(6)自动充电。当智能巡检机器人电量低于设定的阈值时,车载控制系统能够使智能巡检机器人自动返回充电位,进行非接触式充电。
(7)电源管理。可防止非接触式充电系统长时间不间断工作造成的火灾安全隐患。自动巡检状态下电池电量小于30%时(阈值可自行设定)能够启动报警,并自动返回充电桩,完成自主充电。
(8)照明管理。为提高巡检质量和视频传输效果,系统在巡检时自动开启室内照明电源,巡检结束后自动关闭照明电源,实现日常的节能环保。
(9)云台自由旋转。云台旋转的垂直范围为0°~ +90°,水平范围为+175°~ -175°。升降杆根据室内信号设备与地面高度进行配置,升降高度是2 150 mm,最高不超过2 250 mm。
3.2 防入侵安防子系统
防入侵安防子系统通过安装在中继站(机房)的红外摄像机、网络摄像机,对线缆入口、机房门口进行实时监控,外物(不明人员、老鼠等)入侵监测范围后,通过红外摄像机将相关影像、报警信息传送至服务器。
3.3 环境监测子系统
环境监测子系统通过安装于机房的各种传感器可以进行温湿度、水渍、烟雾报警等方面的实时监测。硬件方面由监控主机、温湿度传感器、漏水检测器、烟雾报警器等组成,实现对中继站(机房)温湿度、水渍、烟感的实时监测和报警[8]。
3.4 中央服务器
3.4.1 硬件组成
中央服务器使用3 台工控机实现图像采集处理、环境监控和机器人数据比对、运算功能,系统间采用浏览器/服务器(B/S)架构。
3.4.2 软件主要功能
中央服务器主要有基础管理、巡检管理、监控管理、数据分析、历史报告等功能。
(1)基础管理。新增、删除、修改、查询系统用户信息,包括用户名、用户登录密码等。
(2)巡检管理。新增、删除、修改、查询巡检设备信息,包括设备编号、设备名称、设备坐标、设备高度等。另外,还包括巡检计划管理、巡检任务管理、远程控制管理和手动点检等功能。①巡检计划管理:当前巡检计划查看功能,包含巡检地点、巡检周期、执行状态等信息;用户可新建巡检计划,选定巡检地点、巡检周期、是否手动点检等。巡检计划可随时下发、取消,执行中的计划将按照指定的周期定时生成巡检任务。②巡检任务管理:巡检任务的查询功能,包含当前和历史任务的时间、巡检内容、巡检结果等。③远程控制:在系统客户端手动新建巡检任务,选定巡检地点、时间等信息后巡检机器人移动平台(AGV)将立即执行该任务。
(3)监控管理。①实时监控:系统可实时监控AGV、安防信息和中继站环境状态。AGV 信息监控包括查看AGV 状态和AGV 视频状态,用户可远程和AGV 进行通话;安防信息监控包括查看红外监控状态和查看视频监控状态;机房传感器信息监控包括查看机房温湿度、烟雾传感器、水渍传感器等信息。②报警管理:报警的项目包含温湿度报警、烟雾报警、水渍报警、异物入侵报警、巡检异常报警等。报警条件需设置温湿度、烟雾、水渍传感器报警参数。管理员账户也可以在服务器终端对已发生的报警进行屏蔽,屏蔽之后该条报警将不显示。
(4)数据分析。①巡检报告:查询指定条件范围内的巡检任务和巡检结果,生成巡检报告;根据巡检报告异常的时间对指定巡检视频进行回放。②安防报告:查询指定条件范围内的安防入侵记录,生成安防报告;根据安防报告异常入侵的时间对指定监控视频进行回放。③环境报告:查询指定条件范围内的温湿度、烟雾水渍报警记录,生成环境报告。
(5)历史报告。查询指定条件范围内的历史巡检结果,生成历史巡检报告;根据历史巡检报告异常的时间对指定巡检视频进行回放。
4 系统网络安全
系统采用无线局域网Wi-Fi 作为通信载体,为防止恶意用户窃听和干扰信息,对系统的网络安全采取以下防护措施:
(1)无线局域网与机器人采用AIRMAX 技术进行通信并且相互锁定MAC 地址,普通Wi-Fi 设备无法接入,从而保证两者创建唯一连接而不受其他设备干扰[9]。
(2)无线局域网与机器人内部使用IP 地址和MAC 地址,防止其他无线设备的接入。一方面无线接入点通过配置MAC 地址过滤、IP 和MAC 地址进行绑定,可有效限制非法用户接入。另一方面,实行流量控制,不同用户的带宽可进行人工管理,保证机器人数据通信有足够的带宽,从而保证系统数据传输的畅通。
(3)在无线局域网后台基站端,除了隐藏基站端SSID 外还采用WPA/WPA2 加密方式进行加密。WPA/WPA2 是新一代无线网络安全认证协议,可大大提高无线网络的数据保护和接入控制的增强安全性级别,解决了WEP 加密不能解决的问题。
(4)为进一步保证机器人无线网络安全,还对机器人通信数据进行加密。在机器人与后台进行通信时,通信数据采用授权密码验证,数据采用AES 加密方式,防止非法对机器人或后台数据进行访问,确保数据不被窃取。
5 现场测试
对无人值守信号中继站智能巡检系统的各项功能进行现场测试,分为硬件安装、软件调试和功能验证3 个步骤。硬件安装选取在2 m×3 m×9 m 箱式机房中[10],现场安装服务器机柜1 套、智能巡检机器人1 台、磁导航24 m、安防摄像机1 台、红外防鼠摄像机2 台、水渍传感器4 套、烟感传感器2 套、温湿度传感器2 套、中继站照明控制系统1 套、非接触式充电桩1 套、远程查询终端1 套。系统硬件安装在高速铁路天窗点内进行,每日4 h 作业大约需4 个天窗时间[11];软件调试大约需3 个天窗时间,整体系统安装和调试共需1 周。调试完毕后对相关功能、安全防护等进行了测试,重点包括系统自检、巡检功能及报警实现、自动避障和网络安全等项目。
6 结束语
目前智能巡检系统已在无人值守信号中继站进行了安装和测试,系统运行正常,各项功能可以初步满足替代人工巡检的要求。该系统的网络化运用与管理必将大大降低信号设备维护成本、提高劳动效率、减少交通安全隐患,同时提升高速铁路信号监测自动化技术水平,为高铁安全运营发挥重要的技术保障作用。