双关节机械手最优轨迹控制算法优化
2019-11-16赵连娟
电子技术与软件工程 2019年20期
文/赵连娟
常见工业机器人就是利用对于机械手中的伺服电机进行控制,准确控制机械手自由端运行轨迹,常见类型有:直接坐标型、圆柱坐标型、球坐标型和关节型。如图1所示,关节型机械手运行轨迹通过极坐标来研究。关节式机械手是一种适用于靠近机体操作的传动形式。它由仿生学设计而来,可实现多个自由度自由连接,动作灵活,适于在狭窄空间工作。在本文中主要研究关节型机械手的控制算法优化问题。
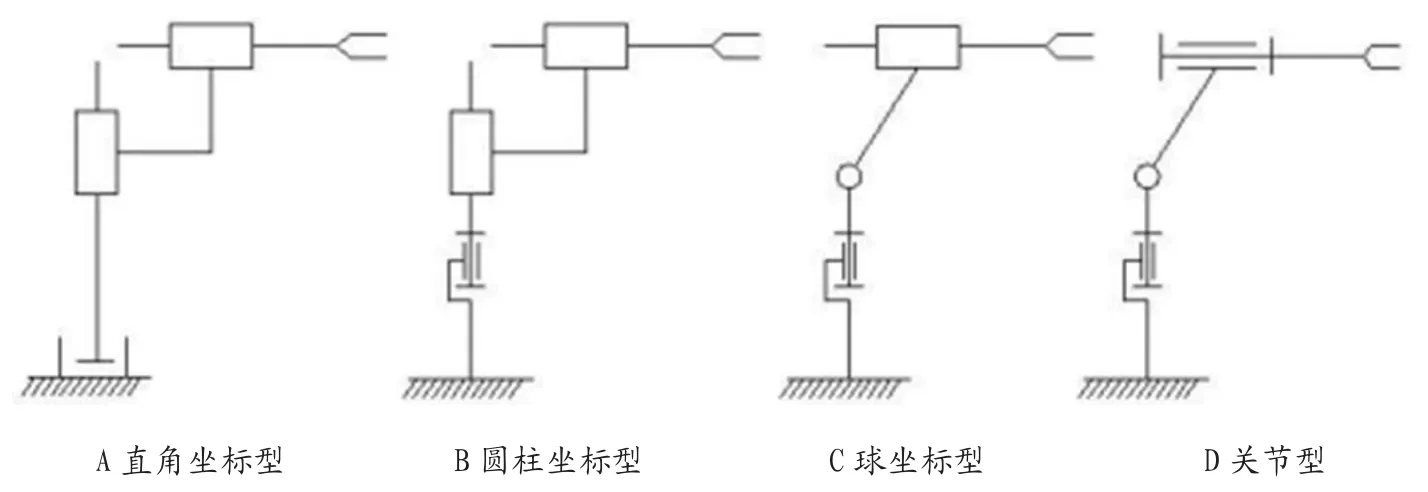
图1:机械手主要类型
1 控制现状
工业机械手在运行中就会面临着抖动,而抖动会增加额外的能量输出从而引起轨迹变化。工业机械手的轨迹规划主要有两种:一种是对机械手的路径轨迹规划,另一种是对机械手运动过程中的位移、速度以及加速度的曲线轮廓规划。
对于多关节机械手来说,运行轨迹是不固定的,所以可以从运行轨迹分析系统,也能从能量角度上减少能量损失,对其速度、加速度进行算法优化控制。在传统控制过程中,一般采取普通差分算法,通过样条插值逐渐逼近控制最优参数。
2 算法优化方法
由于简单的三次样条函数差值优化算法会产生抖动,规划曲线不够平滑,所以要对原算法进行优化。对于双关节机械手每一关节的摆线运动学方程表达式描述如式(1):

对运行轨迹离散化,对其进行采样,采样时间选择为
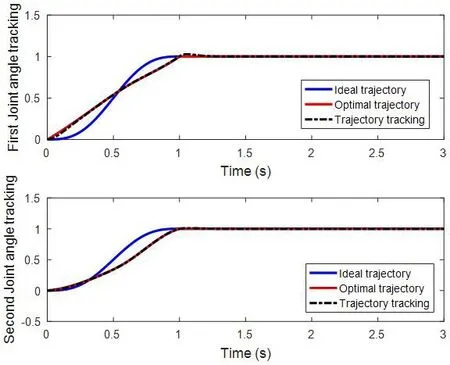
图2:理想轨迹、最优轨迹及轨迹跟踪

图3:控制输入信号
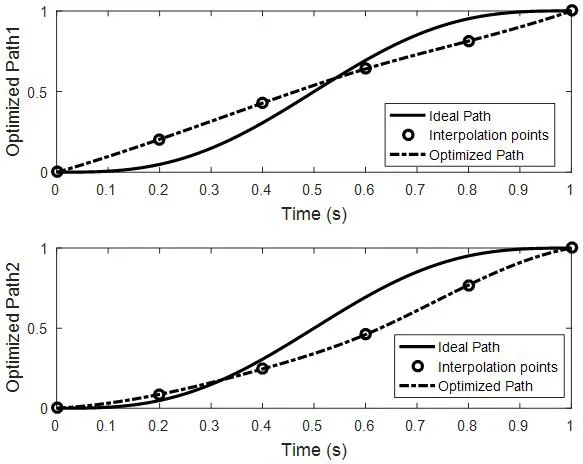
图4:最优轨迹的优化效果
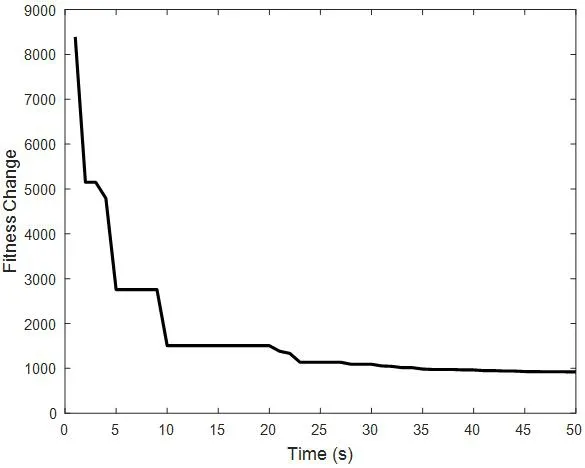
图5:目标函数的优化过程


其中ωi为权值,τ为控制输入信号,为实际轨迹与理想轨迹的差值。
针对双关节机械手,总的目标函数为:

在这里控制输入信号使用PD控制器:

其中e定义跟踪误差。
3 MATLAB仿真
双关节机械手的动力学模型可描述为:

4 结语
经过算法优化可见,运行轨迹平稳,目标函数优化速度较快,机械手运行稳定,无抖动。在初始运动时由于重力作用,力学变化较为剧烈,所需调节输入调整较多,这一部分可以通过调高采样频率使其更加平稳。
