船载式深水网箱投饵系统设计与试验
2019-11-15王俊会俞国燕刘皞春张宏亮
王俊会,俞国燕,2,刘皞春,2,张宏亮
船载式深水网箱投饵系统设计与试验
王俊会1,俞国燕1,2,刘皞春1,2,张宏亮1
(1. 广东海洋大学 机械与动力工程学院 // 2. 南方海洋科学与工程广东省实验室(湛江),广东 湛江 524088)
设计一种适用于大规模网箱养殖的船载式投饵系统。投饵系统主要由上料装置、下料装置、动力装置、抛撒装置和集中控制系统组成,并安装固定于船舷,进行饵料投喂。其中,以PLC作为集中控制系统的控制核心,通过触摸屏界面实现设备的启停、投料速度调控、运行状态监控及网箱饵料投喂数据的记录等。对投饵系统样机进行试验研究。投饵系统的投饵速度在0 ~ 230 kg/min范围内可调,投饵量精度误差为0.1 ~ 1.6 kg,满足容积为127.3 ~ 1 145.9 m3的深水网箱投喂要求,降低养殖人员的劳动强度。
深水网箱养殖;船载式投饵系统;抛撒装置;数据管理
在深水网箱养殖中,劳动力和饵料为主要成本,饵料成本占总成本比例高达80%[6],因此合理的饵料投放可有效节约饵料和养殖成本,减少剩余饵料对水环境的污染和鱼病害的发生。我国深水网箱养殖起步较晚,饵料投喂主要依靠人工及简易投饵设备,投放饵料量和投放时间依据养殖人员经验,造成饵料浪费严重、劳动强度增加和投放量精度差等问题。自动投饵系统有节约养殖成本、减少饵料浪费、提高投饵效率、减少水环境污染、降低劳动强度和提高水产品质量等优点[2-4]。美国ETI公司研发了FEEDMASTER投饲系统的破碎率低,投饵精度和可靠性较高,基于可编程控制器(PLC)控制技术,最大投饲能力达250 kg/min,支持直径约10 cm的饵料输送管道,最高可为60个网箱同时供料[6]。加拿大Feeding Systems公司对虾类、鲽鲆类、鲇等不同养殖对象开发了不同的投饵控制软件,其研制的自动投饵系统可用于大型网箱、陆基养殖工厂和鱼苗孵化场等多种环境,通过自动投饵系统和专用软件的协调配合,提高了深海养殖饵料利用率[21]。中国海洋大学水产学院[21]根据网箱养殖特点,结合渔民养殖经验,设计了一种深水网箱投饵机,并进行了相应试验,测定了不同情况下管道中真空度,以及在冲饵管和吸饵管不同开度时的下料时间。该投饵机充分利用海水资源,使用水力环流供饵、水力抽负吸饵、水动力投饵、汽油机水泵提供动力,利用管道向多个距离不同的网箱供料。随着劳动力和饵料成本的不断增加,人工投饵和简单的机械投饵不能满足集约化深水网箱养殖需求,故研制机械化、自动化、操作简便、经济性高的自动投饵设备成为当务之急。
笔者针对海域深水网箱养殖的特点和养殖的需求,制定系统的硬件及软件设计方案,研发一种以PLC为控制核心的船载式深水网箱投饵系统,实现上料、下料、投饵于一体且定量、定速、定点的适应不同养殖环境的船载式深水网箱投饵系统,具有运行状态实时显示和历史数据可实时存储、查询和下载等功能,解决人工投喂耗时费力及投饵量过少或过剩的问题,实现对大规模、工业化深水网箱养殖的快速精准定量投喂。
1 总体结构及工作原理
1.1 总体结构
投饵系统的总体结构主要包括自动旋转式下料机构、出料装置、上料装置、抛撒辅助装置、控制系统等(图1)。投饵系统主要以西门子 PLC 为控制系统实现自动控制,使用嵌入式MCGS设计人机界面进行直观、方便的操作。
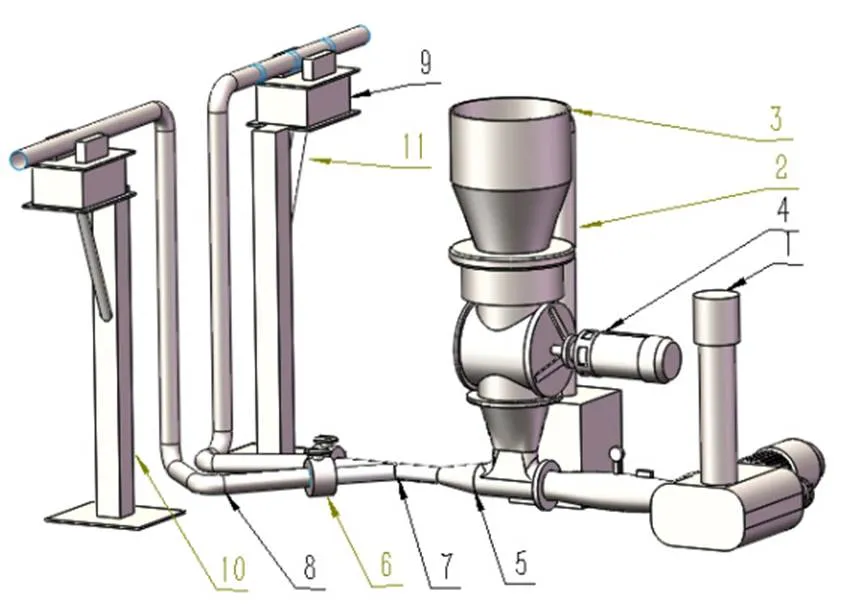
1:罗茨鼓风机;2:自动上料装置;3:料斗;4:旋转下料机构;5:受料器;6:电池阀:7:Y型管;8:输料管;9:工业舵机;10:抛撒辅助装置;11:电动推杆
人机界面使用MCGSE8.0嵌入式编程软件开发,触摸屏主要界面有操作画面、工作画面、数据查询、数据导出和报警记录等。操作画面可启动系统运行,显示运行状态和选择手动操作。工作画面显示各电机运行状态、实时投料量和投饵参数;设定参数包括网箱号、投饵量、饵料型号和饵料投喂次数等。主要工作界面如图2所示。数据查询界面可查询当天的投饵数据和历史投饵数据,查询内容有投饵网箱号、投饵时间、一天内每个网箱投饵次数及所用饵料型号等数据。数据导出界面主要将数据导出,为管理人员记录和管理数据提供便利。报警记录界面主要显示报警的原因和报警记录,以便提高系统维修效率。

图2 触摸屏工作界面
1.2 工作原理
投料船到达深水网箱投饵位置后,启动投饵系统,在触摸屏界面选择自动投饵或者手动投饵,因投饵需要,系统启动后鼓风机自动启动,且在投饵期间鼓风机一直启动,至所有网箱投饵结束。然后吸料机启动,饵料被送入料斗内(料斗内装有空载报警传感器、开始投料传感器、高限位传感器及满载报警传感器)。开始投料传感器给下料电机发出信号(空载时系统自动报警停机且显示报警原因),饵料被输送到受料器;高限位传感器检测料斗内饵料即将满载时,控制系统发出信号,上料电磁阀立即启动,停止向料斗内加料;在满载报警传感器检测到饵料时,满载报警器立即报警且显示报警原因。在开始投料传感器检测到饵料后,下料电机自动启动且可依靠变频器调节下料的速度,投饵量达到预设值后,系统记录投喂网箱号、投喂时间及投喂量。
1.2.1 上料装置 上料装置由真空吸料机、导料管、电磁阀、除尘器和气料分离器等组成,主要采用压送式气力输送进行上料,利用真空泵产生的内外压力差将饵料随空气一起吸入导料管,再经过气料分离器分离空气与饵料,使饵料输送至料斗中,饵料中的灰尘等随空气进入除尘器,防止灰尘堵塞鼓风机,料斗内装有传感器,可检测料斗内饵料的状态。满料时可通过电磁阀的启停减小吸料机的气压,使其无法形成气压差,控制饵料输送的启停。根据养殖用户要求,投饵系统出料速度需高达230 kg/min,为保证投饵机工作连续性,饵料上料速度应大于投饵系统的抛撒速度。因此系统上料装置上料速度应大于250 kg/min。
1.2.2 下料装置 下料装置是否合理直接影响系统投饵量的精度,投饵系统下料装置采用传感器、料斗、旋转卸料器、受料器和编码器组成。下料电机由变频器控制,调节其频率进而控制电机转速。在饵料被送入料斗后,根据开始投料传感器检测的信号,自动启动下料电机,且编码器开始工作,记录电机的转数,由编码器采集的信息确定投料量并记录实时投料量。
1.2.3 动力装置 由罗茨鼓风机、压力表和电磁阀组成。鼓风机把产生的高速气流送入受料器,使气体与饵料在受料器中形成一定的气料比,饵料与气流混合后,通过PVC导料管将饵料输送至目标网箱。鼓风机所需功率:
=INB/ (60 000Bg)。
式中,IN为气源机械所需风量(m3/min);B为所需气源机械真空度,取B为鼓风机系统的总压力损失1.10 ~ 1.20倍;B为气源机械的流体效率,依选用的风机类型而定;g为机械传动效率,根据传动装置形式而定。
电磁阀安装于受料器与动力装置之间,在系统压力较大时开启电磁阀,减小压力及停止饵料输送。
1.2.4 集中控制装置 集中控制装置由PLC、触摸屏和传感器组成。触摸屏与PLC通过PPI/MPI进行通讯,用于设置系统投饵参数和显示数据。系统启动后,作业人员可根据鱼群摄食需求确定投饵量,并在触摸屏上设定相应的参数及控制抛撒装置的方向。投饵结束后记录饵料型号、投饵量、投饵网箱号、每个网箱的投饵次数等实时数据,且实现历史数据查询和数据导出等功能。
2 主要部件设计
2.1 计量系统设计
系统投饵量通过控制旋转卸料器及编码器采集的数据进行计算,旋转卸料器形状如图3所示,旋转卸料器每旋转一圈输出饵料量15 kg,旋转速度为15 r/min,使用增量式旋转编码器,计算旋转卸料器旋转圈数。旋转卸料器为系统下料装置,可通过改变变频器频率控制下料电机的转速,提高饵料下落速度,降低饵料破碎。旋转卸料器由六片均等的叶片组成,通过编码器采集卸料器旋转圈数,编码器每转采集脉冲为1 024个。计算公式:
L=L(PPS/ 1024),
式中,L为总下料量(kg);PPS为编码器采集到的总脉冲数;L为卸料器每转的下料量(kg)。

图3 旋转卸料器
2.2 抛撒辅助装置设计
为方便养殖人员操作,减轻劳动力,投饵系统设计一种由舵机、推杆、切换装置等组成抛撒辅助装置(图4)。该装置主要由水平旋转结构和上下转动结构构成,结构简单,通过抛撒装置与出料管道相连,改变抛射出口的倾角以及旋转角,控制饵料的抛射距离和抛射范围。
水平旋转结构主要由工业舵机、舵盘和卧式轴承座组成。利用工业舵机的耐用性和传动可靠,两者可保证在海上作业时的稳定性。考虑到舵机输出轴长期受力会减少使用寿命,安装卧式轴承座连接舵机输出轴与舵盘,使之减小摩擦损失和表面磨损。最后舵盘通过铝型材与管道连接。工业舵机工作时,使抛撒装置带动出料管道左右旋转。上下转动结构主要由电动推杆与铰链组成。铰链安装在支撑底座与工业舵机之间,通过直线运动转成圆周运动实现底板的上下转动。电动推杆两头分别安装在支撑杆和底板上,通过由电动推杆的伸缩,改变出料管与水平面的倾角,从而使出料管道上下转动。
用PVC斜三通水管与投饵机的出料管用304不锈钢管连接,在两个输出管道安装常闭式电磁阀,当得到24 V直流电供电时即可开启,两个输出管道分别连接两个抛撒装置,从而分别实现两个出料口的启停。

1:管夹;2:工业舵机;3:电动推杆;4:支架
2.3 控制系统程序设计
系统程序以西门子专用编程软件STEP-7-MicroWINSMART作为操作平台,运用梯形图作为编程语言,程序流程如图5所示。程序包括:对网箱号设定、投饵量的计算、投饵次数的设定和不同型号饵料的投饵量计算等。控制部件主要有吸料机、鼓风机和下料机,对控制部件进行运行状态的监控,投饵量的设定,饵料空载满载的报警、故障显示,投饵数据的记录和导出。

图5 PLC程序流程
2.4 控制系统电路设计
控制系统主要有西门子PLC、断路器、热继电器、中间继电器、变频器和电容式接近开关等构成,主电路电压为380 V,主要连接鼓风机、下料电机、吸料机和变频器,鼓风机和吸料机连接有断路器和热继电器,对电路进行保护。下料电机连接变频器和断路器,以保护电路和调节下料速度,因变频器对传感器的干扰,需在变频器输入端加有源滤波器。PLC控制部分使用24 V直流电(DC)控制,控制电机和电磁阀的启停及为编码器和传感器供电,主电路图如图6所示。
2.5 控制系统硬件设计
由于海上环境对设备腐蚀严重,选用触摸屏作为人机界面对系统进行控制,减少开关量控制,触摸屏需要完成记录、查询、下载投饵数据,选用嵌入式昆仑通态触摸屏(MCGS),方便对数据进行处理,由24 V DC供电。传感器采用电容限位开关,检测距离6 mm,由24 V DC供电,灵敏度高。编码器采用增量型旋转编码器,由24 V DC供电,用于检测下料电机的转数,根据转数测量投饵量。变频器由380 V 交流电供电,用于对下料速度的控制。继电器选用24 V DC供电,2开2闭。下料电机型号为YX3-90L-4,功率为1.5 kW,电流3.6 A,转速为1 400 r/min。鼓风机和吸料机选用型号为TYPEY160M-4、功率为11 kW、转速为1 450 r/min的电动机,舵机及推杆选用24V DC供电,实现对出料管的移动。系统控制核心PLC选用西门子s7-200smart系列,CPU为st20,有12个输入和8个输出组成。PLC输入输出地址分配如表1所示。
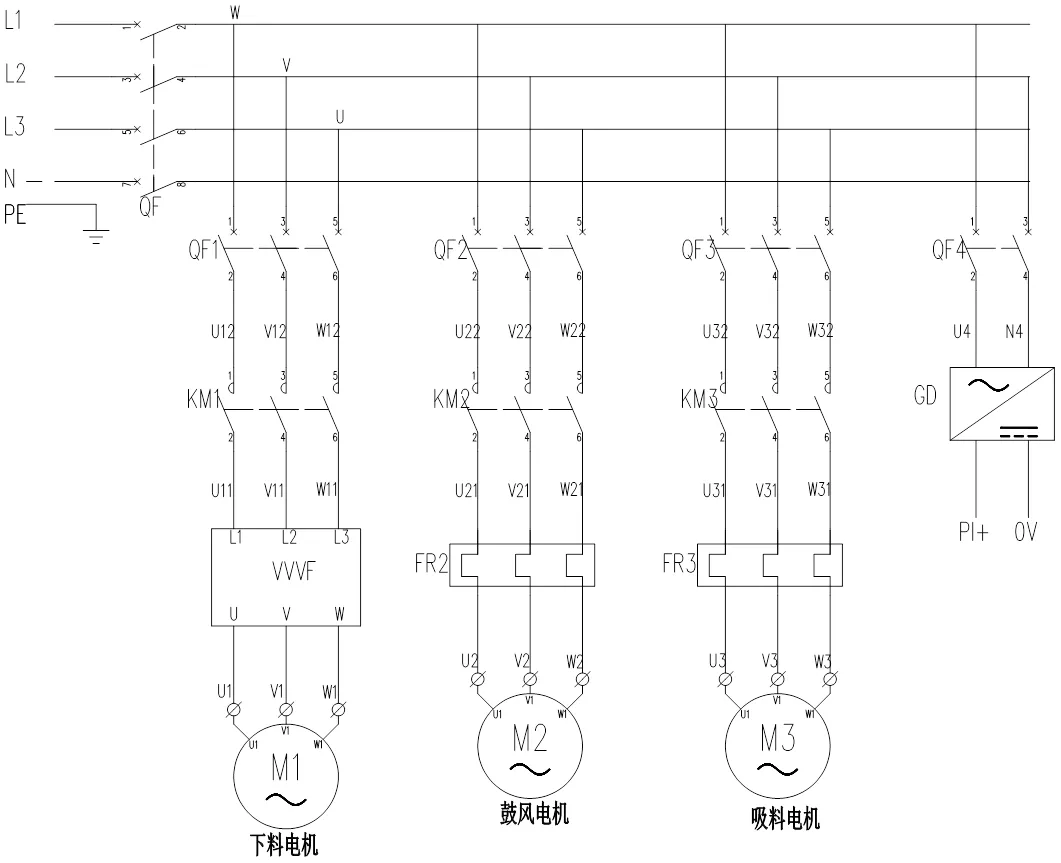
图6 系统主电路

表1 PLC输入输出地址分配
3 试验与分析
试验在湛江市东海岛深水网箱养殖区进行,网箱养殖密度为6 kg/m3,其体积为127.3、286.4、509.2、759.7及1 145.9 m3,根据养殖鱼体质量进行自动投喂测试,投饵系统实物如图7所示。试验主要观察抛撒辅助装置抛撒的均匀性和稳定性;下料速度的调节对下料量的影响(表2)。对养殖60 d的鱼群进行自动投喂与人工抛撒投喂,测试自动投饵系统的效率,如表3所示。

图7 投饵机
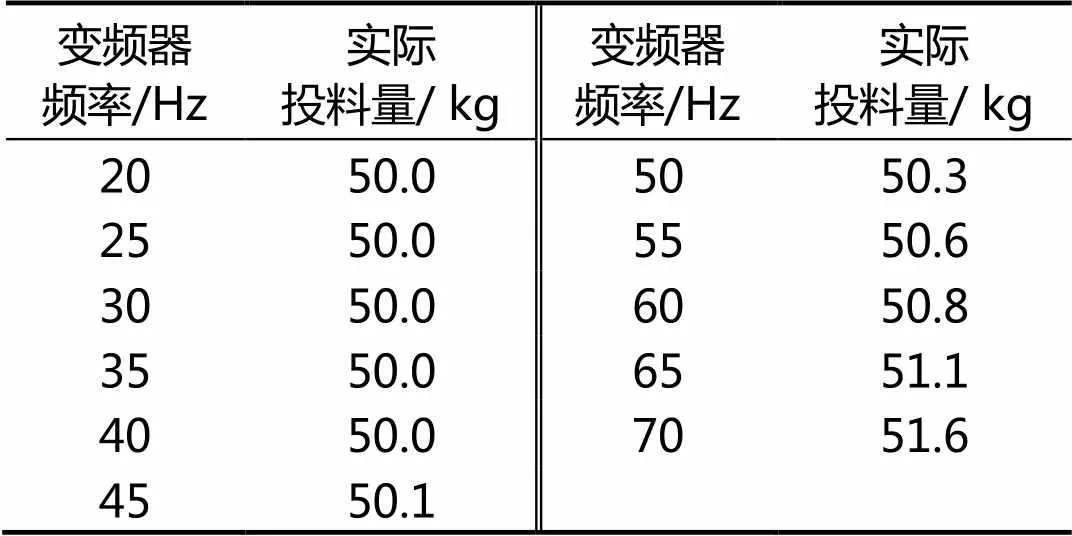
表2 不同下料速度的投料量
说明:预设投喂量为50 kg。
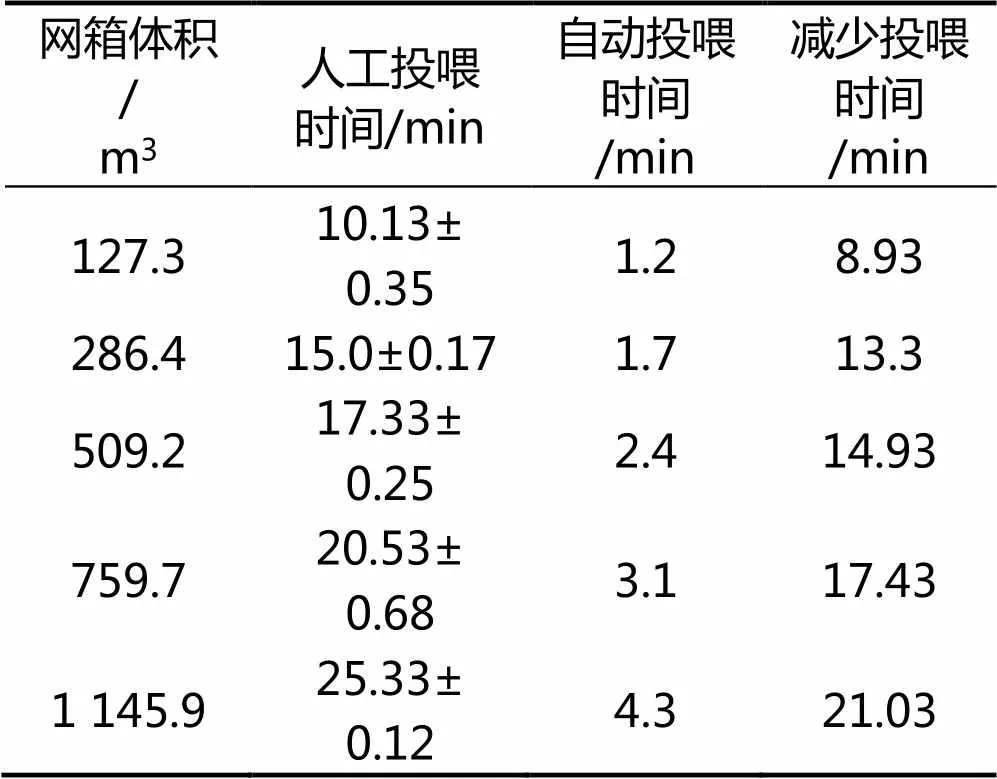
表3 投喂时间
由表 2测试数据可得,投饵系统预设投喂量为50 kg,控制变频器频率为20 ~ 70 Hz,在试验变频器频率达到45 Hz之后,系统实际投喂量与预设投喂量出现误差,随着频率的增加,投喂量误差不断增加,而在集约化深水网箱养殖中,饵料投喂量大,要求系统投饵速度快,因此根据养殖人员投喂量误差允许的范围,变频器频率最高为60 Hz,此时系统饵料抛撒速度为230 kg/min,高于刘志强[22]设计的网箱养殖自动投饵器出料速度150 kg/min、挪威AKVA公司设计的AKvasmartccs自动投饵系统出料速度192 kg/min[23]、美国 ETI公司研发的FEEDMASTER自动投饵系统平均出料速度100 kg/min[23],但低于胡昱[24]设计的吸送式自动投饲系统出料速度300 kg/min。相对于人工投喂,本系统的自动投喂时间约减少86%。因此,本系统大大提高了投喂效率。
为减少饵料的浪费,饵料投喂时可根据养殖鱼体密度、养殖鱼种类、养殖鱼不同生长期以及当地气候与水质状况等诸多因素,调节网箱投喂量和投喂速度,做到科学养鱼,乃至智能化养殖,降低养殖成本,减少饵料浪费及由此造成的养殖环境污染,营造一个良好的水产养殖环境。
4 结语
针对湖泊、海域的大容量网箱养殖需求开发的船载式自动投饵控制系统实现了自动上料、定量投料、控制投料速度、实时记录数据、查询和导出历史数据等功能,解决了深水网箱养殖人工投料劳动强度大、饵料输送困难、饲料浪费和数据记录困难等问题,投饵系统出料速度最高可达230 kg/min,投饵效率高。自动投饵系统在一定程度上可节约饵料,提高投饵效率,但缺乏对鱼群摄食情况或网箱内饵料剩余情况的检测,投放的饵料仍有一定浪费,投饵系统的设计仍需进一步改进和完善。可采用机器视觉或声呐成像等技术,将鱼的摄食情况传递给控制系统,根据鱼的摄食情况决策投料的启停,进一步节约饵料,防止水体污染。
[1] 刘思, 俞国燕. 工厂化养殖自动投饵系统研究进展[J].渔业现代化, 2017, 44(2): 1-5.
[2] 王勇平, 聂余满, 谢成军, 等. 基于机器视觉的养殖鱼群智能投饵系统设计与研究[J]. 仪表技术, 2015(1): 1-4.
[3] VON BORSTEL F D , SUÁREZ J, EDGAR D L R , et al. Feeding and water monitoring robot in aquaculture greenhouse[J]. Industrial Robot: An International Journal, 2013, 40(1): 10-19.
[4] 孙月平, 赵德安, 洪剑青, 等. 河蟹养殖船载自动均匀投饵系统设计及效果试验[J]. 农业工程学报, 2015, 31(11): 31-39.
[5] 乔峰, 郑堤, 胡利永, 等. 基于机器视觉实时决策的智能投饵系统研究[J]. 工程设计学报, 2015, 22(6): 528-533.
[6] 钱阳. 基于图像动态获取的水产养殖智能投饵机控制系统研究[D]. 镇江: 江苏大学, 2017.
[7] SKØIEN K R, MORTEN O A, ARTUR P Z, et al. Feed spreaders in sea cage aquaculture–Motion characterization and measurement of spatial pellet distribution using an unmanned aerial vehicle [J]. Computers and Electronics in Agriculture, 2016, 129: 27-36.
[8] MA H, TSAI T F, LIU C C. Real-time monitoring of water quality using temporal trajectory of live fish[J]. Expert Systems with Applications, 2010, 37(7): 5158-5171.
[9] 胡昱, 郭根喜, 黄小华, 等. 基于PLC的深水网箱自动投饵系统[J]. 南方水产科学, 2011, 7(4): 61-68.
[10] AKVA. CCS Feed system Product Specifications [EB/OL].[2017-03-12].http://www.akvagroup.com/products/cagefarming-aquaculture/feed-systems/ccs-feed-system/product specifications.
[11] 徐志强. 池塘养殖自动投饲系统远程精准化升级与验证[J]. 中国工程机械学报, 2015, 13(3): 272-276.
[12] ATOUM Y, SRIVASTAVA S, LIU X. Automatic Feeding Control for Dense Aquaculture Fish Tanks[J]. IEEE Signal Processing Letters, 2015, 22(8): 1089-1093.
[13] 王彦丽. 气力输送的应用分析及发展前景[J]. 山东化工, 2017, 46(7): 91-92; 95.
[14] 刘星桥. 基于物联网和GIS的水产养殖测控系统平台设计[J]. 渔业现代化, 2016, 43(6): 16-20.
[15] 崔龙旭, 倪琦, 庄保陆, 等. 基于PLC的工厂化水产养殖轨道式自动投饲系统设计与试验[J]. 广东农业科学, 2014, 41(22): 159-165.
[16] 胡昱, 郭根喜, 黄小华, 等. 深水网箱养殖自动投饵计量装置设计[J]. 南方水产科学, 2014, 10(2): 80-85.
[17] ANG K P , PETRELL R J . Control of feed dispensation in seacages using underwater video monitoring: effects on growth and food conversion[J]. Aquacultural Engineering, 1997, 16(1/2): 45-62.
[18] 王志勇, 湛志新, 江涛. 集中式自动投饵系统的研制[J]. 渔业现代化, 2011, 38(1): 46-49.
[19] 朱健康. 水产颗粒饲料投饵装置的原理与应用[J]. 福建水产, 2011, 33(5): 67-69.
[20] 刘吉伟, 王宏策, 魏鸿磊. 深水网箱养殖自动投饵机控制系统设计[J]. 机电工程技术, 2018, 47(9): 145-148.
[21] 袁凯. 投饲机器人关键技术研究[D]. 上海: 上海海洋大学, 2013.
[22] 刘志强. 海上网箱养殖自动投饵器的研制[D]. 泰安:山东农业大学, 2016.
[23] 纠手才, 张效莉. 海水养殖智能投饵装备研究进展[J].海洋开发与管理, 2018, 35(1): 21-27.
[24] 胡昱, 陶启友. 一种用于深水网箱养殖的吸送式船载自动投饲系统: CN205794486U [P]. 2016-12-14.
Design and Experiment on Shipborne Bait Delivery System for Deep Water Cage
WANG Jun-hui1, YU Guo-yan1,2, LIU Hao-chun1,2, ZHANG Hong-liang1
(1.,2.(),524008,)
To design a shipborne bait feeding system suitable for large-scale cage farming.The system is mainly composed of feeding device, blanking device, power device, throwing device and centralized control system. The central control system uses PLC as the control core, through the touch screen control to achieve the start and stop of the equipment, feeding speed, running state monitoring and feed data recording cage bait.The experimental results showed that the feeding distance of the bait was 5- 14 m. The casting speed can be adjusted within the range of 0-230 kg/min. The feeding precision was 0.1-1.6 kg, and it could meet the feeding requirements with the circumference of 40-120 m deep water cage (volume 127.3 -1 145.9 m3) and could reduce the labor intensity of the breeding staff.
deep sea cage farming; shipborne bait system; sprinkling device; data management
S969.31
A
1673-9159(2019)06-0124-07
10.3969/j.issn.1673-9159.2019.06.016
2019-05-07
广东省普通高校重点科研项目(2018KZDXM038);南方海洋科学与工程广东省实验室(湛江)项目(ZJW-2019-01);湛江市科技项目(2018A01019、2017A03005)
王俊会(1991―),男,硕士研究生,研究方向为智能产品创新设计与理论。E-mail:1012330524@qq.com
俞国燕(1970―),女,博士,教授。主要从事智能设计与制造、现代设施渔业装备、机器人技术应用。E-mail:yugy@gdou.edu.cn
王俊会,俞国燕,刘皞春,等. 船载式深水网箱投饵系统设计与试验[J]. 广东海洋大学学报,2019,39(6):124-130.
(责任编辑:刘庆颖)