月船2号:坠毁在阴影之中
2019-11-15迟惑
文/迟惑
2019年9月,印度空间研究组织的月船2号探测器携带着维克拉姆号登陆器,开始了这个国家历史上第1次向月球表面软着陆的努力,所选择的位置是月球北极地区的一块平地。但是,这个以印度航天先驱命名的探测器,并没有成功着陆,反而砸在了月球表面的阴影里。虽然印度总理莫迪称这次任务取得了99%的成功,但是如果我们回顾印度人在发射之前宣布的目标,会发现这次任务应该认为是基本失败了。
关于“维克拉姆号”坠毁的时间表,印度空间研究组织至今也没有给出一个令人信服的说法,各方面只能通过有限的数据进行推测,我们在这里就不再赘述了。但不管怎么说,这次着陆的过程肯定不像印度人自己说的那样,“成功了99%”“功亏一篑”等等。
真正的印度制造
印度的许多前沿型号上,都有浓厚的国外技术痕迹。不过“月船2号”却真的是印度独立设计制造,这种独立自主并不是印度想要的,而是被逼无奈。
“月船2号”由轨道器、着陆器和漫游车三部分组成。轨道器的名字也叫“月船2号”,着陆器称为“维克拉姆号”。

▲印度除了依靠美国,也动用了自己的深空测控站

▲印度空间研究组织负责人在发射现场督战
轨道器的起飞质量大约是2379千克,其中有1697千克是推进剂,轨道器的发电能力是1千瓦,根据设计它能够绕月球飞行7.5年,如果在月球及轨道上的保持比较理想,还可以再延长一年。月船2号轨道器是由印度斯坦航空工业公司制造的,这家公司在国际航空界享有“盛誉”,凡是经它维修的飞机几乎全都坠毁了,被戏称为印度航空兵最可怕的敌人。不过从“月船1号”和“月船2号”的飞行情况来看,这家企业在制造航天器方面的质量控制还算不错。
维克拉姆号着陆器连同月球漫游车发射质量总计1471千克,按照计划,它从轨道器上分离之后,将首先进入一条近月点30公里、远月点100公里的轨道,然后用液体发动机逐步下降。维克拉姆号着陆器不是印度斯塔航空公司的作品,它是由印度空间应用中心研制的。

▲印度空间研究组织寻找“维克拉姆号“
“维克拉姆号”所携带的月球车非常小,发射质量只有27千克,据说它仅仅由太阳能电池来提供电力。它有6个轮子,各用一台无刷电机驱动,设计速度是每秒钟一厘米,设计行程为500米。漫游车本身不具备和地球通信的能力,所探测到的数据要通过着陆器转发。这辆月球车只有两件主要科学仪器,一是立体成像相机,用来生成三维图像。另一台是阿尔法粒子激发x射线波谱仪。据说月球车的6个轮子上都刻着印度的国旗,可以在月球表面留下印度的痕迹,不过由于“维克拉姆号”着陆失败,这台独具匠心的月球车也失去了在月球上盖印章的机会。
靠不住的俄国人?
有一些观点认为,“维克拉姆号”的下降发动机是来自俄罗斯的,因此俄罗斯要为软着陆的失败承担很大责任。但这种观点实际上并没有事实依据。印度确实曾经打算和俄罗斯合作研制“月船2号”,重点就是着陆器。然而这件事情无果而终,着陆器还是印度人自己搞的。

▲印度空间研究组织发布的“月船2号”轨道方案
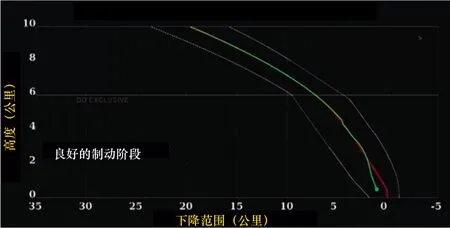
▲印度空间研究组织给出的“维克拉姆号”下降轨迹

▲印度拥有32米和16米的深空测控天线
早在2007年11月12日,印度空间研究组织就和俄罗斯联邦航天局签署了关于“月船2号”的合作协议,由印度空间研究组织作为总承包方,研制轨道器和漫游车,俄罗斯联邦航天局负责提供着陆器。2008年9月18日,印度内阁在总理曼莫汉·辛格的主持下召开专题会议,批准了这份合作协议。2009年8月探测器总体设计完成,两国技术人员开始进入工程实施阶段。
印度这样的选择在情理之中,因为苏联是世界上第一个实现无人着陆器降落在月球表面的,虽然俄罗斯航天与苏联航天相比不可同日而语,但毕竟还是继承了它的衣钵。
印度空间研究组织严格按照计划执行着研制进度,拿出了“月船2号”的有效载荷。但是到2013年1月,因为俄罗斯没有能够按时把着陆器拿出来,所以发射日期推迟到了2016年,此后不久,由于发射“福布斯-土壤”火星探测器时遭遇失败,俄罗斯联邦航天局退出了“月船2号”的合作。
俄罗斯航天局退出后,印度空间研究组织只好靠自己。但从头研制着陆器需要时间,所以把发射日期推迟到了2018年3月,后来又推迟到了4月,之后又打算推迟到10月。到了2018年的6月19日,印度空间研究组织召开了第4次总体技术评审会,对系统配置和着陆程序做出了一些修改,这导致发射日期进一步推迟到2019年上半年。然而在2019年2月的一次实验中,着陆器的两条支腿遭到了些许破坏,发射日期只好推迟到2019年的7月14日,而着陆日期推迟到了2019年的9月6日。发射之前又发现了一些技术上的瑕疵,导致发射日期推迟到了7月22日,这一次没有再发生推迟。

▲“维克拉姆号”打算在月球极区找水

▲“月船2号”的月球车很小
800牛顿发动机从哪里来?
目前各种资料都显示,“维克拉姆号”使用的下降发动机有两种,一种推力为80牛顿,一种推力为800牛顿。800牛顿推力的发动机起到主减速发动机的作用,而它的技术来源于印度GSAT通信卫星平台的远地点发动机。
地球静止轨道通信卫星采用远地点发动机是一种很普遍的设计。但多数远地点发动机的推力都是490牛顿左右,印度人的发动机推力却只有440牛顿。它用在印度自己的地球静止轨道卫星上还算是成功的,但是用来做月球着陆器的反推发动机就有些不足了。
因此,印度空间研究组织通过一些研发工作,把这种发动机的推力增大到了800牛顿。研发的细节基本上没有披露,我们只是在互联网上找到了一点有限的资料,是印度空间研究组织发动机研制部门当中负责燃料喷嘴的两位专家撰写的。在论文的摘要中,两位印度专家指出,他们已经进行了一系列的实验,喷嘴流量达到了设计最大流量的87%,这就让人有些疑惑。一般来说,用于航天飞行的器件和分系统,都要在超过设计指标的条件下试运行,来考察设计的可靠性和强健度,考验它能不能适应极端条件下的使用。在其他的资料搜索当中,我们也没有发现印度方面进行了更大流量的实验。如果仅仅测试了87%的最大流量,就直接装机上天飞行了,实在是一件不太严肃的事情。

▲“月船2号”升空备受印度媒体关注
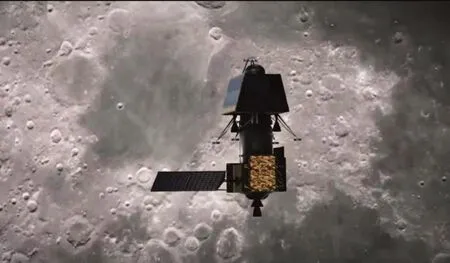
▲“月船2号”和“维克拉姆号”组合在月球上空飞行

▲测试中的“维克拉姆号”,“月船2号”在后方
为什么在极区着陆
“维克拉姆号”这次的着陆地点选择在了月球北极附近,应该说这个位置不完全在月球正面,对于地面观测和指挥控制来说有着一定的难度。那么印度为什么要选择这么一个位置呢?这可以从政治和科学两个方面来解释。
从科学角度来说,人们普遍推测,月球上即使有水,也只可能存在于两级地区。这里比较寒冷,或许会有一些水冰蕴藏。如果能在两极地区真正找到水,就为人类下一步开发利用月球,甚至于长期驻守月球提供了基本条件。
从政治角度来说,美国,苏联/俄罗斯都是在月球正面着陆的,中国在月球背面着陆引起了国际轰动。但是以印度的航天科学实力,不可能实现在月球背面的着陆,那么怎样选择一个别人都没有着陆过的地区,来实现月球探测的突破呢?那么此前没有人着陆过的月球极区可能是一个相对比较理想的选择。
失败的原因
到目前为止,所有在月球表面软着陆的探测器都采用了几乎一样的弹道方案。也就是先绕月飞行,然后喷气制动,把探测器的姿态从平飞转向倾斜向下的飞行,逐步下降,最后降落在一个平坦的区域。
这个过程需要对着陆器本身的姿态和速度做极为精确的控制。特别是减速用的主发动机,要求其推力可以精细调节。中国为了实现“嫦娥四号”的安全落月,研制生产了一种推力在7500牛顿到1500牛顿之间无极可调的着陆发动机,这样在整个向月面的下降和调姿调速过程当中,都能根据地形的变化,精确而细致地控制推力,最后实现了着陆。
然而印度没有可调推力发动机,只能用5台推力固定为800牛顿的发动机制动和下降。实际上印度空间研究组织为“维克拉姆号”设计了一种手动挡式的着陆反推设计。就是说在下降过程当中,先用5台发动机实现减速,随着向月面着陆的过程不断推进,距离不断减小,一台一台地关掉800牛顿发动机,最后只保留两台,实现探测器的着陆。

▲“创世纪号”同样没有解决变推力发动机的问题

▲“创世纪号”发回的最后一张照片
这样的推力变化方式,对于控制系统设计来说,简直就是一场噩梦。而且所减少的推力不是几十牛顿几牛顿,而是整整800牛顿,这会在推力曲线上呈现出非常恐怖的断崖。实际上我们称之为手动挡都不一定合适,因为在手动挡汽车上换挡之后,司机可以通过人力控制油门来实现事实上的驱动功率平滑过渡。但是在维克拉姆号着陆器上并不具备这样的功能。所以笔者非常怀疑,维克拉姆号着陆器实际上在第1次800牛顿发动机关机的时候就已经失控翻滚着掉到月球上去了,印度空间研究组织目前发布的数据还不足以证明这个推测是不是正确。但是10月4日,在“维克拉姆号”着陆失败后差不多一个月后,美国商务部部长罗斯访问了班加罗尔,会见了印度空间研究组织负责人。事后,他对印度媒体说,无论美国政府还是美国宇航局,都已经没有办法再为“月球2号”和“维克拉姆号”做些什么了。因为“维克拉姆号”的通信系统是印度人自己研制的,美国人无能为力。
在对此事的报道当中,印度媒体也在不经意间透露了这样一个事实,在“维克拉姆号”的下降过程当中,由于姿态控制上的问题,反推发动机实际上是朝着天空而不是朝着月面喷射。这样肯定不能起到减速的作用,反而是把“维克拉姆号”加速推向月球。因此,我们现在所要关心的是“维克拉姆号”到底摔成了多少块,而不是它到底距离预定着陆地点多远。
既然没有高性能的变推力发动机,那么在控制当中还可以采取另外一个办法,就是更加精密地控制姿态,控制发动机的喷射时间,用更短促的喷射来实现所需要的冲量,这样着陆器的下降过程可能会更加颠簸一些,但是也可以实现成功着陆。然而这对控制系统的灵敏度,特别是发动机本身和燃料输送系统电磁阀的开闭响应能力,提出了更苛刻的要求。印度空间研究组织显然是做不到的。
实际上以色列的“创世纪号”月球着陆器采用的也是固定推力发动机,也遇到了和“维克拉姆号”同样的问题。从视频情况看,以色列方面的控制系统设计师水平可能更高一些。我们确切地看到了“创世纪号”在月球表面减速转向,然后垂直下降的过程。但是很显然,“创世纪号”刚刚把姿态调整为垂直下落,就失控了。从这个角度来说,变推力发动机看来是月球着陆必备的关键分系统。

▲“维克拉姆号”的理想降落状态
残骸无处寻
维克拉姆号着陆器失败以后,印度方面动用了很大的力量来查找它的下落。这在很大程度上也是为了给自己一个交代,“维克拉姆号”到底掉在了什么地方,摔成了什么样子,自己距离真正意义上的成功还有多远,这可能是印度航天科研工作者非常想知道的。
印度动用了两种资源来查找“维克拉姆号”的下落。一种是它自己的轨道器,也就是月船2号绕月飞行器,另一种就是美国的月球勘测轨道器。“维克拉姆号”失败之后没有多久,印度空间研究组织就放出消息,说“月船2号”已经拍摄到了“维克拉姆号”的残骸,距离预定着陆地点并不远。但是提供给媒体的照片却让人疑窦丛生,这是一张分辨率极低的的广角照片,几乎小半个月球都呈现在这张照片上,要在这样小比例尺的图片上找到一个一米多直径的着陆器几乎是不可能的,而且这个着陆器很可能已经摔得七零八落了。月球勘测轨道器也对着陆地点进行了多轮拍摄,并没有发现探测器的残骸。据美国宇航局方面解释,这是因为坠毁地点处在山脉的阴影当中。月球上没有大气,因此也就不可能折射太阳光,阴影之处就是真正意义上的黑暗,什么都看不见,什么也拍不到。月球勘测轨道器是一颗分辨率非常高的探测器,我们可以认为它是月球的高分辨率遥感卫星。在国际月球探测当中,月球勘测轨道器发挥了重大的作用,中国在为“嫦娥四号”选择着陆地点的时候,也大量使用了月球勘测轨道器提供的遥感图像。所以月球勘测轨道器没有拍到“维克拉姆号”的残骸,并不是美国人在故意搪塞,而是真的什么都没有拍到。
部分印度媒体在“维克拉姆号”失去联系之后,还发出了奇怪的言论,称美国的深空测控通信网(简称深空网)在“维克拉姆号”即将着陆的时候,突然切断了通信,导致着陆失败。这种无稽之谈,反映了印度文化传统当中的一种恶习,出了坏事就把责任推给其他人。
深空网是这个世界上功能最强大的空间探测基础设施之一。除了中国之外,世界各国的深空探测项目,包括日本、印度、俄罗斯和欧洲,都要在星际探测活动中部分借助深空网。当然,这些国家也会为美国提供自己的测控资源,这是航天国际合作的一种默认模式。中国之所以无法使用深空网的优异性能,主要是因为美国政客设置了极为不合理的政治障碍,使美国宇航局无法和中国开展空间技术合作。实际上深空网在近几十年的国际星际探索当中一直在发挥相当积极而正面的作用,各方对它的评价都很高。印度空间研究组织从官方层面上也没有呼应这种无稽之谈。实际上“维克拉姆号”的坠毁才是造成信号中断的原因,而不是因果相反。
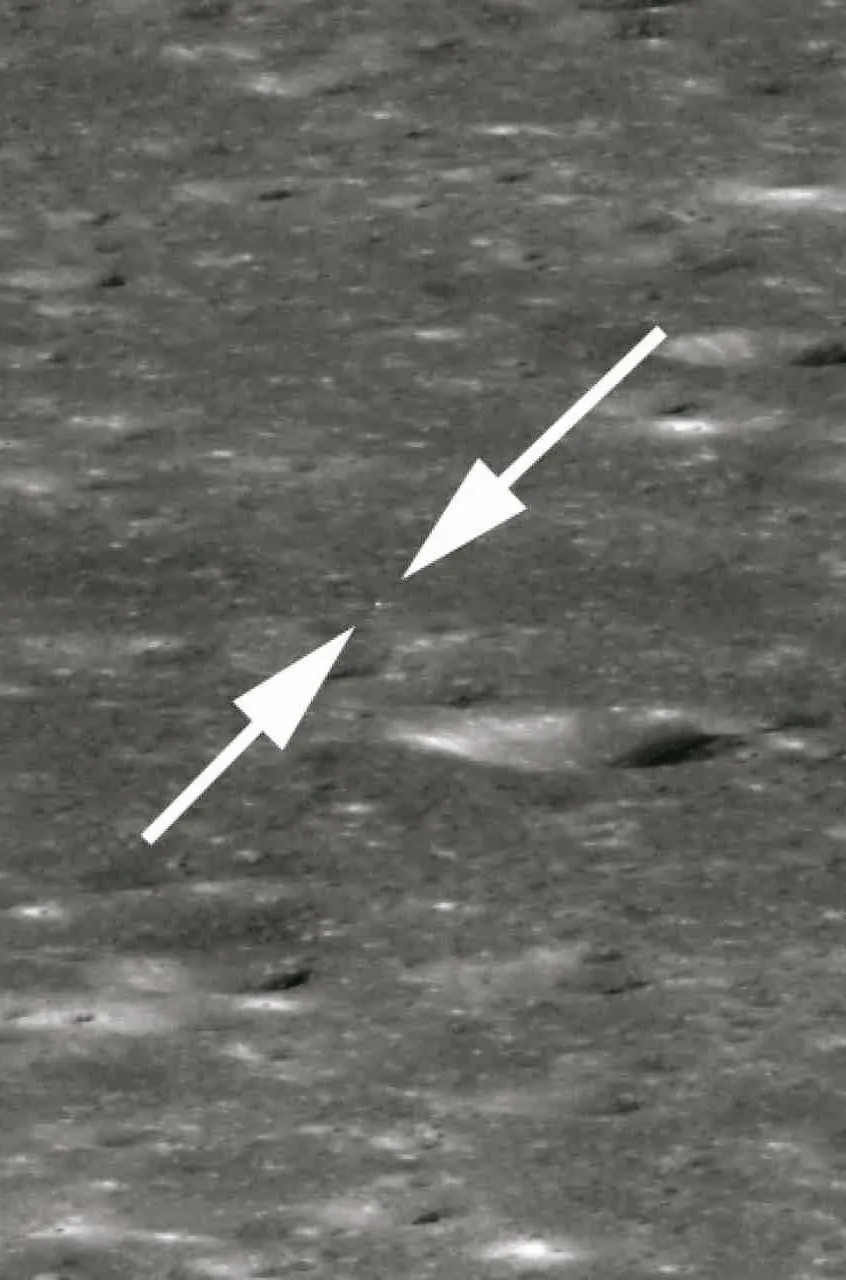
▲月球勘测轨道器拍摄到了嫦娥四号,但是没有找到“维克拉姆号”的残骸
