一种船闸人字门门缝合拢自动校准的方法
2019-11-14蒲浩清
蒲浩清
摘 要:新船闸人字闸门关终后的门缝和错位是确保人字闸门正常合拢,船闸正常运行的两个非常重要的指标。如果这两个指标出现偏差,就会影响人字闸门的合拢效果,导致船闸联动运行的中断,机械过载等问题,严重时还会对闸门的机械结构造成损坏。目前传统的方式多依靠人工调整。本文创新的提出一种间接和实时相结合的自动校准方法,实现了船闸人字闸门关终后门缝错位的自动校准。
关键词:人字闸门;关终门缝;自动校准
中图分类号:U641 文献标识码:A 文章编号:1006—7973(2019)10-0022-02
1背景
1.1合拢的意义
根据船闸人字闸门设计的挡水原理,两扇人字闸门关门合拢对正,形成三铰拱的挡水结构,是船闸人字闸门安全运行的基础和保障。目前船闸人字闸门采用的关终控制方式,一般普遍存在着两扇人字闸门的关终“门缝”与最终合拢对位两种状态,有一定的随机性变化。关终后的门缝与错位存在一定的不确定性,这也是基于船闸设备运行安全的考虑,船闸控制策略不得不采取“合拢保护”的安全措施。一旦在运行中检测不到合拢信号,船闸将会进行保护动作。因此,船闸运行效率受到一定影响。
1.2关终延时
关终延时是存在与两扇人字闸门的关终“门缝”与最终合拢对位两种状态之间的时间。即在人字门关终限位信号触发后,人字闸门继续延时运行的时间。关终延时一般的时间单位为毫秒,多用于对人字闸门最终合拢对位状态的调整。本文的自动校准方法同样是基于关终延时的校准方法,即通过算法,合理的修改关终延时,使得人字闸门在不同工况下的最终合拢对位的相关参数满足船闸运行要求。
1.3门缝与错位
本文中将会把“关终”门缝分解为门缝和错位两个参数。门缝即关终信号触发后,人字闸门门头承压条水平距离。错位则是关终信号触发后,人字闸门门头承压条垂直距离。
2 自动校准方法
2.1自动校准的总体思路
人字闸门的关终“门缝”与很多因素有关,如不同温度下的水工建筑的变化,门体、推拉杆等金属结构的变化,电气开关响应时间变化,水位变化等等,这诸多因素的变化经过组合整体反应在了关终“门缝”上,所以要绝对定量地将关终延时和关终“门缝”的数值进行一一对应,再进行调整是非常困难的。
笔者结合日常人工调节的经验和相关大量数据的分析发现,虽然关终延时和关终“门缝”的数值不能进行一一对应,但是在任一个状态下修改固定的关终延时后,关终“门缝”的变化在一个可控的范围值内,并不会出现跳变。这就为接下来的自动调整方法提供了可行性。
本文将在上述的基础上,提出一种以间接校准为主,实时校准为辅,直接针对“关终”门缝进行校准的自动校准方法。
2.2间接校准方法
间接校准方法实际是模拟人工校准的整体流程。它的优势在于测量值更加精确,调节更加频繁,并且调节值更加科学。
它实现的方式是以当次闸次的门缝和错位等数据为依据计算出对应的关终延时值,达到对下一闸次人字闸门关终错位调校的目的。因为间接校准方法逻辑关系并不是一个一一对应的映射关系,而是一个范围值。并且在校准逻辑中也没有固定的参考基点,所以间接校准方法的调节并不是一个精确值的调整,而是一个趋势的调整。即是以减少下一次人字闸门错位为目的调校。
2.2.1校准对象的选择
目前调整船闸人字闸门两侧关终延时的校准方式按观察对象可以分为两种。
一种是观察人字闸门关终后的错位,通过人为估算错位值后,结合实际经验,在保证门缝的情况下修改人字闸门关终延时,达到调节错位的目的。
另一种是观察水压后即最终合拢状态下的人字闸门错位,通过人为估算错位值后,结合实际经验,在保证门缝的情况下修改人字闸门关终延时,达到调节错位的目的。
在实际中人字闸门关终时的错位和人字闸门水压后的错位单独时具有较好的重复性,但是两者之间并没有很明显的线性关系,为了保证合拢的真实可靠性,本文中间接校准方法选取水压后即最终合拢状态下的人字闸门错位作为调整对象。
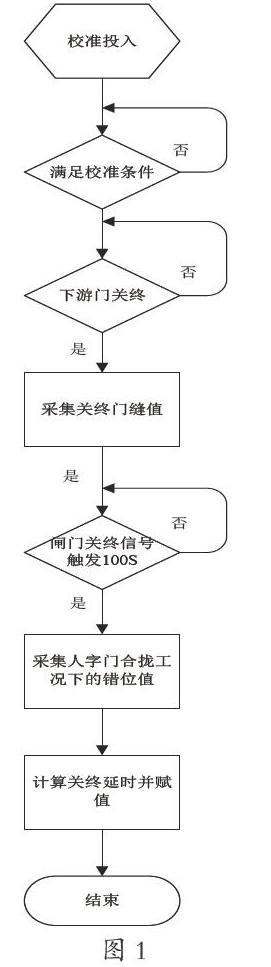
2.2.2间接校准流程
间接校准流程如图1。
間接校准主要会有三种状态:
状态一:当检测关终门缝正常不需要调整时,两侧人字闸门的关终延时只需根据水压后的错位值进行调整。
状态二:当检测关终门缝过大需要调整时,两侧人字闸门的关终延时需同时增加相应的延时后再根据水压后的错位值进行调整。
状态三:当检测关终门缝过小或已经达到最小允许门缝,人字闸门未停机的,两侧人字闸门应立即停机,对应的关终延时减少一个固定值。
流程中涉及的参数和关终延时的调整依据可以根据实际的人字闸门的数学模型和实际的调整经验等确定。得出的结果根据人字闸门不同的尺寸,以及人字闸门启闭机的不同而不同。因此本文中不再叙述。
2.3实时校准方法
前文提到要绝对定量的将关终延时和关终“门缝”的数值进行一一对应,再进行调整是非常困难的。所以实时校准并不是一个精确的调整,和间接校准类似仍然是一种趋势的调整。它的作用主要是辅助间接校准,避免“过调”的现象。
2.3.1“过调”现象
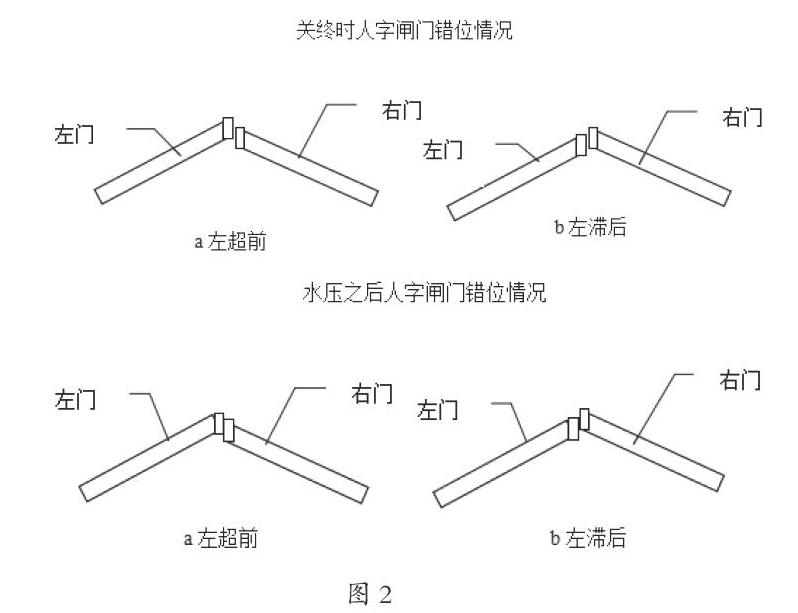
目前的人字门关终和最终水压合拢有以下的几种状态,如图2.
图2
以水压后人字闸门错位情况为例,假设在没有进行调整时本次水压后人字闸门错位和下一次水压后人字闸门错位的情况分别是a左超前和b左滞后。
如果在这种情况下投入了间接调整,由于间接调整是以减小错位趋势为目的的调整,在a左超前时,必然会将左侧闸门向滞后方向调节,右侧左门向超前的方向调整,在下一次闸次中就会使得下一次左滞后更加的严重,会增大下一次水压后人字闸门错位值,是非常危险的。这种错误的调整方式就称之为“过调”。
通过大量实验和实际工作积累的数据发现,有概率出现“过调”现象的时间段大都是两次闸次时间相隔过长,使得两次人字闸门受到的温度,水位等环境发生巨大变化所致。因此本文设定参数“停航间隔时间”予以识别。即大于“停航间隔时间”设置值的就会进行实时校准,反之则进行间接校准。
2.3.2校准对象的选择
实时校准是在人字闸门运行的同时通过逻辑运算对当次的人字闸门关终延时进行调整,达到调整人字闸门错位的目的。而水压后的人字闸门错位值不具备当次闸次的可调性,所以本文将人字闸门关终后的错位值,作为实时校准的对象。
2.3.3实时校准流程
实时校准流程如图3。
实时校准中的等待计算位用一侧人字门完全停止运行的时刻点代替,可以分为以下两种情况:(a)左门先停机(b)右门先停机;这两种情况下又分别存在左超前和右超前两种状态,于是有以下四种状态:
状态一,左门先停机,停机时人字闸门的状态为左门超前,此时应根据相关参数增加右人字闸门的关终延时。
状态二,左门先停机,停机时人字闸门的状态为右门超前时,此时右人字闸门应立即停机。
状态三,右门先停机,停机时人字闸门的状态为左门超前,此时左人字闸门应立即停机。
状态四,右门先停机,停机时人字闸门的状态为右门超前时,此时应根据相关参数增加左人字闸门的关终延时。
实时校准不考虑错位超出调整范围的情况,故当人字门闸门的错位在调整范围以外时,不予校准。流程中涉及的参数和关终延时的调整依据可以根据实际的人字闸门的数学模型和实际的调整经验等确定。得出的结果根据人字闸门不同的尺寸,以及人字闸门启闭机的不同而不同。因此本文中不再叙述。
3 結语
本方法中间接校准方法的优点是调节效果稳定,但是在出现待闸时间较长或长时间停航之后,其调节效果有较小概率会出现同向增大的情况即“过调”现象。而实时校准方法调整对象为关终时的错位值,精确性和稳定性受调整逻辑不同程度的影响,导致其数次累加的调节效果并不理想。参数“停航间隔时间”扬长避短,很好的将两种方法有机的结合起来,能使得人字闸门门缝及错位值长时间保持在正常范围内。在天气变化较为明显的情况下也不需要维修人员频繁的调整,安全可靠,且大大的降低了因天气原因导致的合拢信号超时的故障率,在减少维修人员工作量的同时提高了船闸的运行效率。
