直驱式两指型在轨捕获装置控制器设计
2019-11-14矫日华倪风雷金明河
矫日华,倪风雷,金明河
0 引 言
随着空间机器人技术的发展,使用机器人完成在轨服务成为了重点研究内容,其中非合作目标在轨捕获是在轨服务的关键技术之一[1].目前在轨捕获主要有飞网捕获、飞爪捕获、机械臂末端执行器捕获.飞网捕获不需要针对目标的特定位置,适用性强,也不需要考虑目标是否自旋,但只能用于在轨清除之类的任务,不能用于在轨维修等任务[2].飞爪捕获对捕获精度要求高,目标自旋时不容易抓取,但成本较低[3].机械臂末端执行器捕获方式需要捕获目标固定的位置,对机械臂的精度要求较高,可重复捕获,适用性强.
鉴于机械臂末端执行器捕获方式在在轨服务中适用性强,该捕获方式得到了广泛研究[4-5].目前已研制出的末端执行器有加拿大航天局研制的SPDM的末端执行器,其采用一对平行钳对合作目标的接口进行捕获,能够实现电气连接[6-7];德国宇航中心的ROTEX机械手,采用两指构型,集成了多种传感器,用于捕获浮动物体,但夹持力比较小,连接刚度不高[8-9];日本的ETS-VII的机械臂末端执行器,采用三指型设计,用于捕获目标卫星,具有较高的连接刚度,但其只能对合作目标的特殊结构进行捕获[10].中科院合肥智能研究所研制了一种弧形两指式末端执行器,其具有较大的包络空间,能够对目标的手柄进行捕获,但其拖动能力有限[11].可以看出用于在轨捕获的末端执行器应具有结构简单,感知能力强,连接刚度高等特点[12].鉴于此哈工大机器人研究所研制了一种直驱式两指型捕获装置,用于捕获非合作目标.该捕获装置,结构简单,并且集成了多种传感器,具有丰富的感知能力,采用冗余设计,具有高可靠性.
1 捕获装置机械结构简介
捕获装置设计安装在服务卫星的机械臂上.服务卫星针对非合作目标的捕获过程为:
1) 进入目标轨道,并接近至距目标几米处;
2) 对目标成像,计算出目标的姿态、自旋轴以及旋转速度;
3) 与目标进行旋转速度匹配;
4) 伸出机械臂,对目标捕获部位进行跟踪;
5) 目标捕获部位进入捕获装置捕获容差范围内,开始进行捕获;
6) 捕获完成后拖动目标进行姿态调整,为后续操作做准备.
考虑到空间交汇技术的限制,为了完成对非合作目标的捕获,捕获装置设计要求具有一定的容差范围,并能够在规定时间内实现对目标捕获.
根据设计要求,捕获装置的结构如图1所示,采用电机驱动+丝杠传动+抱闸自锁的方案.由手指,转接件、丝杠、驱动器、制动器、限位开关和接触开关等组成.
图1 捕获装置Fig.1 Capturing Device
捕获装置采用两指方案,无刷直流电机作为动力源,丝杠作为电机的输出轴,旋转带动螺母做直线运动,螺母通过转接件与两根手指末端连接,可以带动手指沿滑槽滑动,完成手指张开和收缩,进行捕获,丝杠末端连接电磁制动器进行自锁.捕获过程如图2所示.

图2 捕获过程Fig.2 Capture process
2 捕获装置传感器系统设计
为了高效可靠的完成捕获任务,捕获装置集成了多种传感器,如图3所示,主要包括激光相机、数字霍尔传感器、电流传感器、温度传感器、电子限位、电位计、接触开关.激光相机主要用于检测目标位姿信息,确保捕获装置和目标之间的相对位姿在捕获范围内;数字霍尔传感器用于无刷直流电机的方波驱动并确定转子位置,进而测量电机转速;电流传感器用于检测母线电流,进行相电流重构,完成电流环控制和锁紧力估算;温度传感器用于检测控制器温度,以保证在空间低温环境中正常运行;电子限位开关用于检测手指极限位置,进行限位保护;电位计用于检测滚珠丝杠螺母的位置,进而确定手指的位置;接触开关在拖动时确定目标是否与捕获装置完全接触.捕获装置的传感器数量和功能如表1所示.
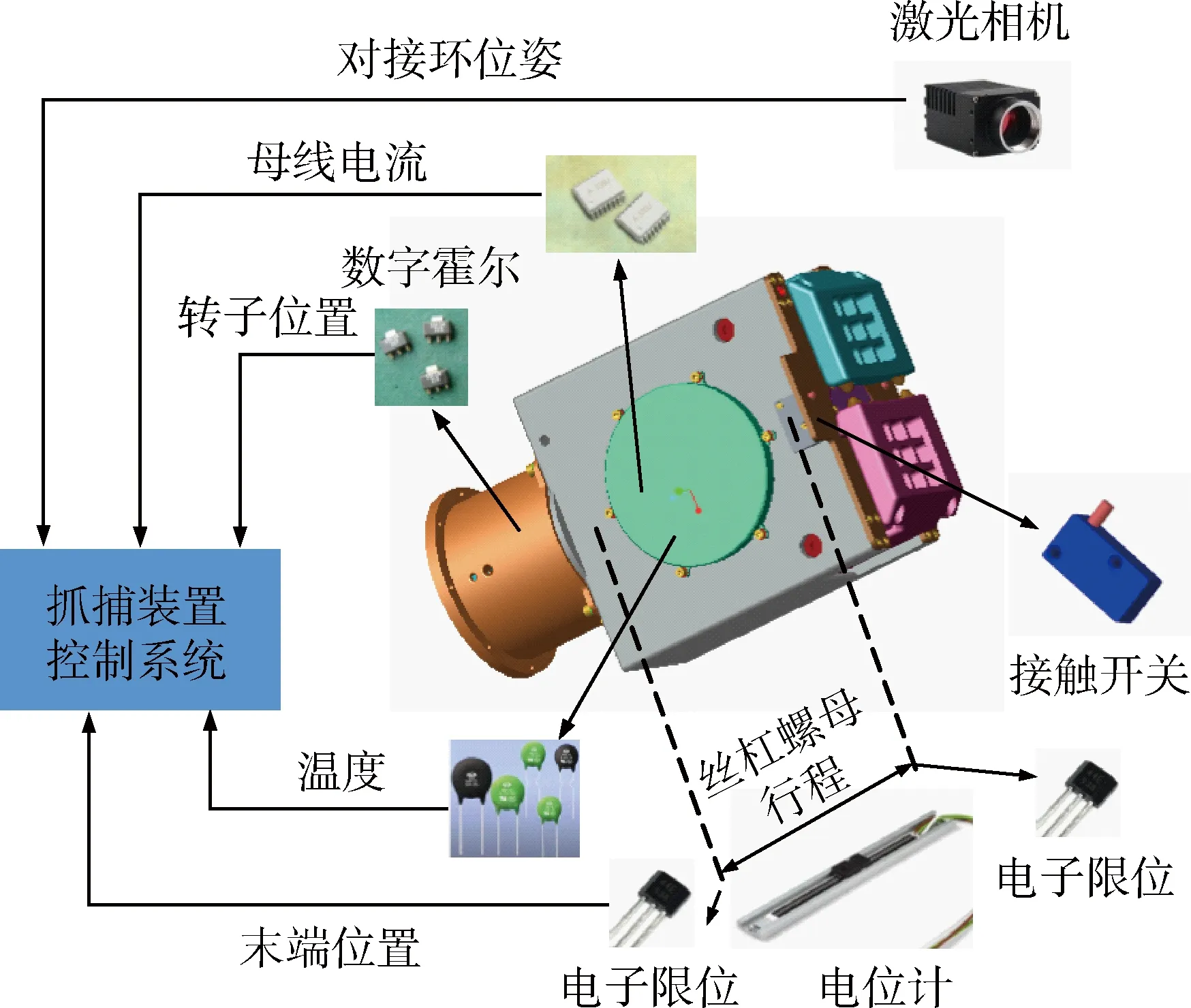
图3 捕获装置传感器Fig.3 Capturing device sensor
表1 捕获装置传感器配置Tab. 1 Configuration of capturing device sensor

传感器类型数量功能激光相机1确定捕获目标位置霍尔传感器3检测转子位置电位计1检测手指位置,确定捕获进程电流传感器1检测母线电流,进行电流环控制电子限位开关2进行限位保护接触开关2确定捕获是否成功,为锁紧做准备温度传感器2检测电路板温度,进行主动热控
3 捕获装置控制器设计
3.1 基于FPGA控制器设计
为了提高系统的集成度,同时保证可靠性和安全性,捕获装置的控制器采用反熔丝FPGA做为控制芯片.FPGA是基于硬件电路实现的,并行处理,系统响应快.按照模块化设计,采用硬件编程语言VHDL进行程序编写,程序框图如图4所示,主要实现以下功能:
(1) AD转换器SPI接口采集功能;
(2) 监测位输入接口采集功能;
(3) 利用霍尔信号信息,实现直流无刷电机的PWM方波调制;
(4) 利用霍尔信号信息,实时计算电机转速;
(5) 利用转速信息,实现电机速度环PI调节;
(6) 电流信号的滤波,并进行电流环调节;
(7) 电机抱闸的控制;
(8) 与外部串口通讯,实时更新控制参数.

图4 基于FPGA控制器程序框图Fig.4 FPGA based controller block diagram
3.2 捕获装置伺服控制
3.2.1 捕获装置数学模型
为了简化结构,减少空间和重量,捕获装置采用电机+滚珠丝杠直接驱动的方式,捕获装置传动链如图5所示,电机输出的旋转运动直接通过滚珠丝杠转换为直线运动,并带动手指进行运动.

图5 捕获装置传动链Fig.5 Chain of capturing device drive
电机端的运动方程为

(1)
式中,J为转动惯量,TL为电机负载,Tf为电机摩擦力矩.
电机摩擦力矩为
Tf=Tc+Bmw
(2)
式中,Tc为库仑摩擦力矩,Bm为电机的粘性摩擦系数.
电机输出电磁转矩为

(3)
式中,Te为电磁转矩,w为电机转速,Ki为电机力矩系数.
滚珠丝杠端的运动方程为

(4)
式中JL为折算到滚珠丝杠的转动惯量,TF为外加载荷产生的摩擦力矩,TP为滚珠丝杠副预加载荷Fp产生的预紧力矩.
(5)
(6)
式中,Ph为滚珠丝杠副导程,η为未预紧的滚珠丝杠副效率,F为滚珠丝杠副上的轴向载荷.
F=FL+Ff
(7)

(8)
式中,FL为捕获装置末端负载力,Ff为导轨摩擦力,Fmax为滚珠丝杠副上的最大轴向载荷.
Ff=Fc+Bgv
(9)
式中,Fc为导轨库仑摩擦力,Bg为导轨粘性摩擦系数,v为丝杠螺母移动速度.
滚珠丝杠传动关系

(10)
3.2.2 伺服控制策略
捕获装置在轨捕获过程主要分为三个阶段,合拢、拖动和锁紧.合拢阶段手指对目标的进行快速合拢;拖动阶段手指将目标拖向捕获装置前端面;锁紧阶段完成对目标的锁紧.由于捕获装置和目标存在速度差,合拢阶段需要在1 s内完成,整个捕获过程在10 s内完成.考虑到目标质量可能会较大,拖动阶段要避免目标晃动,速度不能过快,因此在这两个阶段采用速度控制模式.根据滚珠丝杠行程和捕获时间,合拢阶段电机转速设计为600 r/m,拖动阶段电机转速设计为300 r/m.为了保证连接刚度,在拖动结束还需要锁紧,需要电机提供足够的锁紧力矩.锁紧阶段电机处于堵转状态,转速为零,速度环处于饱和状态,失去调节作用,因此在锁紧阶段采用力矩控制模式,以提供足够的锁紧力.经实验测得,轴向锁紧力大于3 000 N时,连接刚度满足要求.
捕获装置伺服控制框图如图6所示.在速度控制模式下输入期望速度,期望锁紧力为0,在力矩控制模式下输入期望锁紧力,期望速度为0.
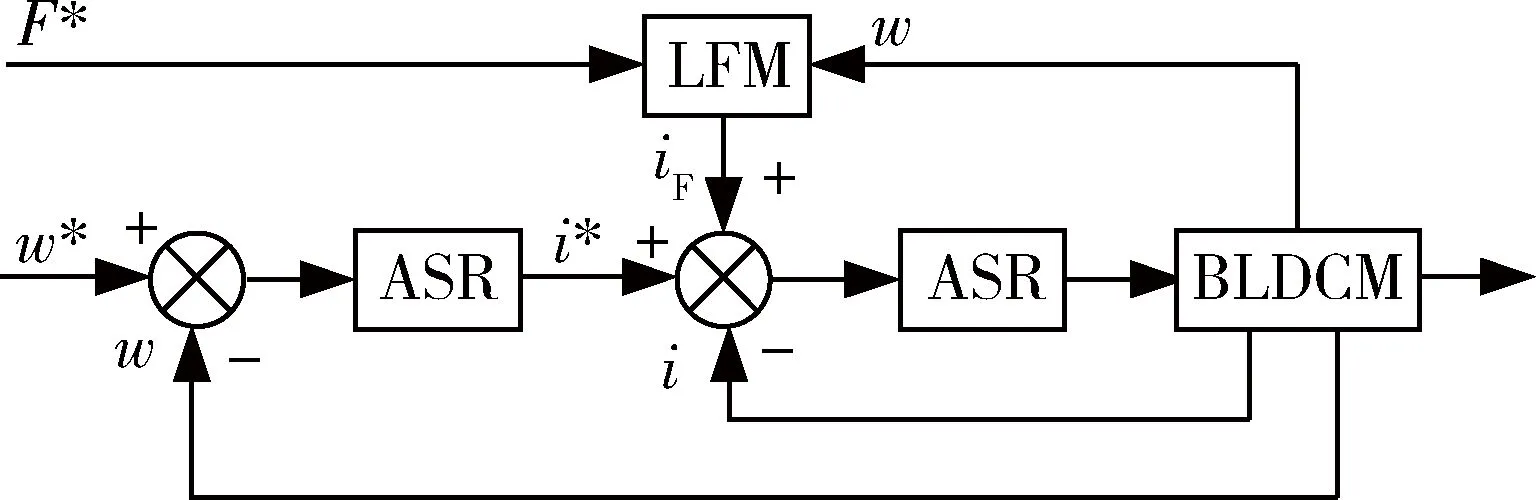
图6 伺服控制框图Fig.6 Servo control block diagram
3.2.3 速度控制
捕获装置的速度控制是基于FPGA实现的,PWM的调制周期为16.7 kHz,为了保证电流环的快速响应,电流环的控制周期应为60 us.在伺服控制的算法实现中采用VHDL硬件语言直接进行编写,也就是通过硬件电路实现.
为了完成速度反馈,采用M/T法测量电机转速,在低速阶段和高速阶段都具有良好的测速效果,计算公式为
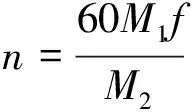
(11)
式中M1是电机霍尔信号脉冲数,M2是高频时钟脉冲数,f是高频时钟频率.
捕获装置的速度控制为双闭环控制,对速度和电流进行分别控制,电流环是内环,以提高系统的快速性,实现过流保护,速度环实现对电机速度的快速响应.
为了获得良好的控制效果,速度环采用PI控制,同时防止较大误差值经积分作用而产生过大的超调,所以速度环环在PI调节的同时进行反饱和设置,即当输出超过阈值后会产生一个削弱分量使输出快速退出饱和,实现方式如式(12)所示:

(12)
式中,us[n]为输出控制变量,e[n]为误差信号,eip为补偿误差信号,i[n]表示积分分量,kp为比例系数,ki为积分系数,kc=ki/kp.
控制参数通过临界比例法整定,选取速度环kp为1.8,ki为21,电流环kp为350,ki为5 000.
3.2.2 力矩控制
捕获装置在锁紧阶段采用力矩控制模式,以保证手指末端的锁紧力达到要求,受空间限制和减重要求,捕获装置没有额外加装力传感器,需要建立抓捕装置的末端力数学模型,完成末端力前馈控制.
根据捕获装置的数学模型,在匀速运转时捕获装置的末端锁紧力数学模型(LFM)为:
Fg=K·i-B·w-FC
(13)
其中
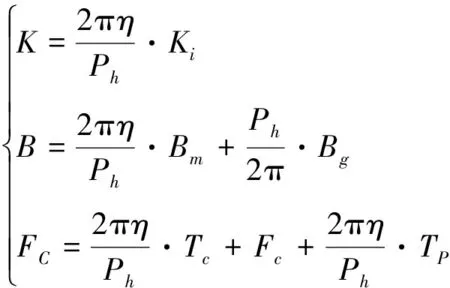
(14)
4 捕获实验验证
4.1 实验系统
搭建了地面模拟实验平台,进行捕获装置的捕获实验,如图7所示.实验平台主要由捕获装置、捕获目标、七自由度机械臂、机械臂控制器、大理石气浮平台和计算机组成.
4.2 捕获实验
捕获装置在合拢和拖动过程中采用速度控制,在锁紧过程中采用力矩控制.在捕获过程中电机速度和末端力如图8所示.
在A时刻,捕获装置开始捕获,首先进入合拢阶段,捕获装置以600 r/min转速运行,保证在1 s内完成合拢.在B时刻,手指抓住目标,进入拖动阶段,捕获装置电机转速降至300 r/min,拖动目标向捕获装置靠近.在C时刻,手指与目标后端面完全接触,进入锁紧阶段,采用力矩控制模式,增大末端锁紧力,达到3 000 N,以保证捕获后目标和捕获装置的连接刚度,最终完成捕获.

图7 试验平台Fig.7 Experiment platform

图8 速度和末端力曲线Fig.8 Speed and end force curve
5 结 论
本文设计了一种直驱式两指型捕获装置的控制器,首先介绍了捕获装置的结构和传感器系统,根据该捕获装置的功能需求,采用反熔丝FPGA做为控制器的核心处理单元,实现了传感器信息的采集,电机驱动,抱闸控制及与外部的总线通讯.建立了捕获装置的数学模型,实现了速度控制和力矩控制的复合伺服控制策略.通过地面模拟实验平台进行了捕获实验,实验结果表明,该控制器能够完成在捕获过程的运动控制并且保证锁紧力矩达到要求.