上海浦江线靴轨平顺性测试及靴轨视频监测系统研究
2019-11-13刘东亮桑林晨
刘 正 刘东亮 桑林晨
(中车浦镇庞巴迪运输系统有限公司,241060,芜湖//第一作者,工程师)
城市轨道交通供电电压通常采用DC 1 500 V或DC 750 V,其车辆的主要受电方式分为架空接触网受流和第三轨受流。第三轨受流根据受流靴和供电轨的相对位置,又可分为上受流、下受流和侧受流3种方式。上海轨道交通浦江线是采用中间导向胶轮路轨的自动旅客运输(APM)系统,采用第三轨侧面受流(DC ±375 V),接地轨上受流作为接地,与传统的地铁三轨受流差异较大。因此,有必要对浦江线APM系统的靴轨关系进行深入研究,确保受流可靠,列车正常运行。
本文通过采用试验采集设备,对该线的靴轨平顺性进行试验,并对采集的数据进行分析及实际现场查验,对安全隐患进行预判,及时整改。同时,通过对靴轨监测系统的研究及应用,定位靴轨冲突事件并及时检修,为线路日常的运维提供了技术支持和保障。
1 浦江线APM系统靴轨关系特点分析
上海轨道交通浦江线APM系统与传统的城市轨道交通线路不同,采用橡胶轮胎,中间设置导向轨导向运行,在导向轨上通过绝缘支架架设2根C型钢铝复合轨、1根接地轨,供电电压为DC ±375 V,其供电轨、接地轨断面图如图1所示。
浦江线APM系统采用全自动无人驾驶方式运行。每个转向架上设置了2个集电靴和1个接地靴,集电靴在DC ±375 V供电轨槽内取电运行,接地靴通过接地轨安全接地。 供电轨、接地轨并不连续,设有绝缘接头、膨胀接头及在道岔位置处的分断,任意处的安装偏差、维护不到位均有可能导致集电靴、接地靴经过时的不平顺,严重时甚至可能发生集电靴滑出供电轨,对供电轨绝缘罩造成损伤,导致出现单级接地故障。因此,需要研究一种有效的试验检测方法,在系统投用前检测供电轨、接地轨安装精度是否达标,集电靴、接地靴运行是否平顺,系统运营期间用以检测供电轨、接地轨维护是否到位,以及集电靴、接地靴运行是否平顺。
本文的靴轨平顺性试验,采用振动加速度传感器采集集电靴、接地靴的振动加速度,通过其振动加速度值来判断集电靴、接地靴运行是否平顺,并通过定位系统确定不平顺的位置。

图1 上海轨道交通浦江线APM系统供电轨、接地轨断面图
2 靴轨平顺性试验研究
2. 1 试验概况
1) 试验内容为上海轨道交通浦江线APM系统的靴轨平顺性。
2) 试验区间为沈杜公路站至汇臻路站上下行。
3) 试验车辆为浦江线4节编组车辆,采用空载形式,集电靴、接地靴碳刷磨耗小于10%,静态接触压力≥45 N。
4) 在APM车辆其中一个转向架的2个集电靴和1个接地靴上分别安装三轴加速度传感器作为测试点,在车顶安装一个全球定位系统(GPS)。
5) 试验工况按正常的运行图行车,在沈杜公路站至汇臻路站全线区间以全自动无人驾驶模式进行3个往返。
6) 试验设备包括数据采集仪、三轴加速度传感器、全球定位系统、以及笔记本电脑一台、导线若干。试验设备架构如图2所示。

图2 靴轨平顺性试验的设备架构
2. 2 试验过程
本试验主要在APM列车第一节车辆上进行,在其转向架的2个集电靴和1个接地靴上分别安装了三轴加速度传感器。其试验过程如下:
1) 检查确认选择的集电靴、接地靴碳刷磨耗小于10%,静态接触压力≥45 N。
2) 将三轴加速度传感器分别固定在2个集电靴和1个接地靴上。
3) 将GPS天线按正确方向固定在车顶上。
4) 将3个三轴加速度传感器的9个接头和GPS接头分别接入Dewetron数据采集的10个通道。
5) Dewetron数据采集系统与电脑连接后,设置各通道变量,包括采样时间、采样频率等。
6) 调试Dewetron数据采集软件。
7) 调试完成后进行数据预采集;预采集后在正线进行3个往返的运行,分别采集3个三轴加速度传感器各轴向的加速度试验数据和GPS位置数据。
2. 3 数据分析及评价
试验测得数据为2个集电靴、1个接地靴上的3个加速度传感器在x、y、z3个方向上正线全线的实时加速度值。通过分析其加速度曲线发现,集电靴的振动加速度主要在水平方向,接地靴的振动加速度主要在垂直方向。
进行现场检查发现,导致出现集电靴水平方向的振动峰值主要原因是:①供电轨水平方向的对齐度不满足要求;②绝缘接头磨耗严重。通过调整供电轨水平方向的对齐度和更换磨耗过度的绝缘接头后,集电靴水平方向的振动峰值明显减少。供电轨调整前后振动加速度对比数据如图3所示。
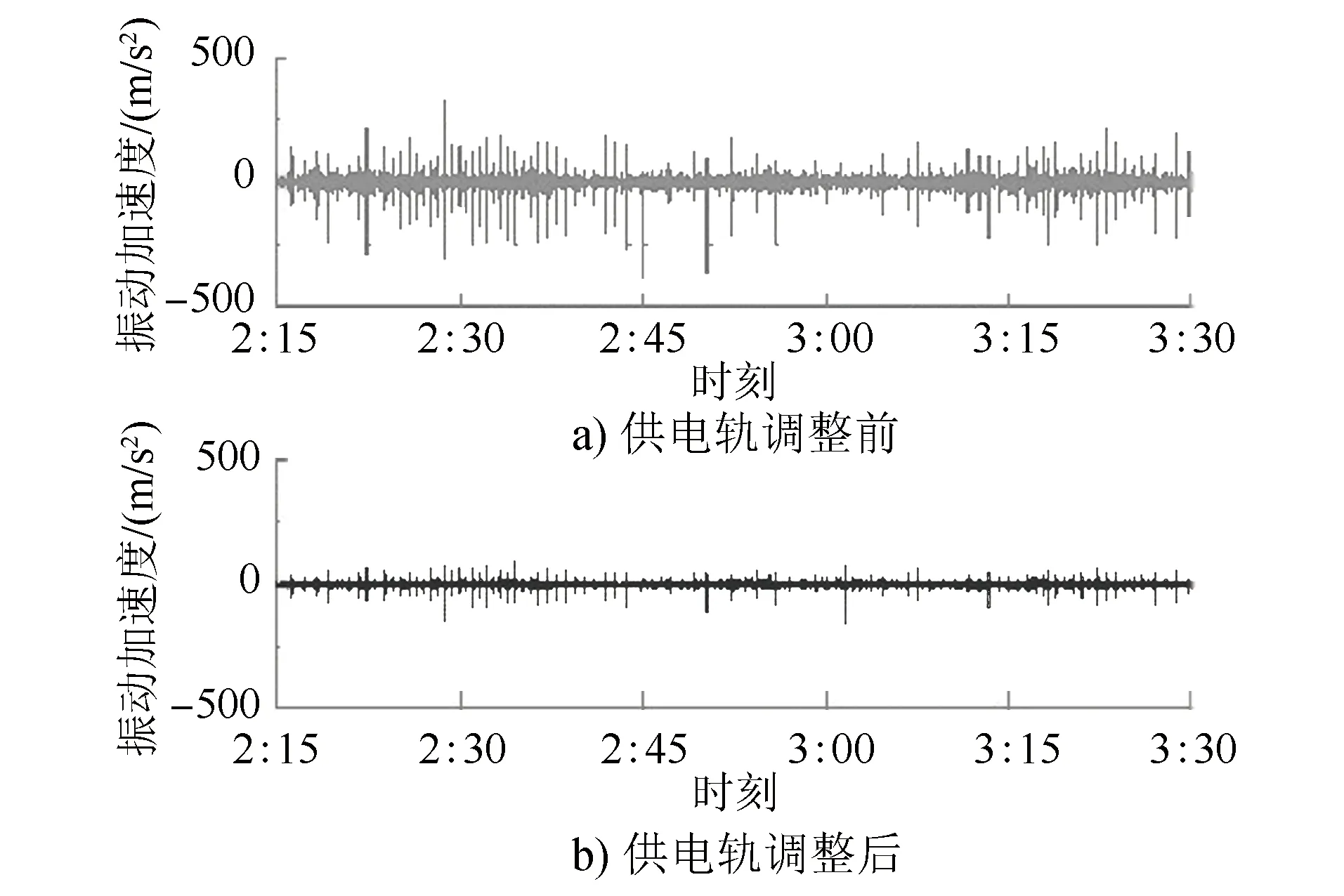
图3 集电靴水平方向振动加速度数据对比
产生接地靴垂直方向振动峰值的主要原因是接地轨垂直方向的对齐度不满足要求,通过调整接地轨垂直方向的对齐度,接地靴垂直方向的振动峰值明显减少,调整前后振动加速度对比数据如图4所示。

图4 接地靴垂直方向振动加速度数据对比
3 靴轨视频监测系统的功能、组成及原理
3. 1 系统功能
车载靴轨视频监测系统采用非接触式的电流传感器监测方式,可实现对牵引电流实时监测。该系统通过监测牵引电流的变化情况来判断是否出现靴轨异常。一旦出现异常情况,系统的分析服务器将发送信号给视频监控系统,由视频监控系统采集视频和图像通过车地无线传输通道把告警信息、视频、图像发送到运营控制中心。靴轨监测系统的工作流程如图5所示。运营控制中心调度人员通过查看监控屏幕推送的报警信息及图像,确认故障信息和图像;根据故障的严重程度,安排现场应急处置人员,并根据相应流程实施应急处置。
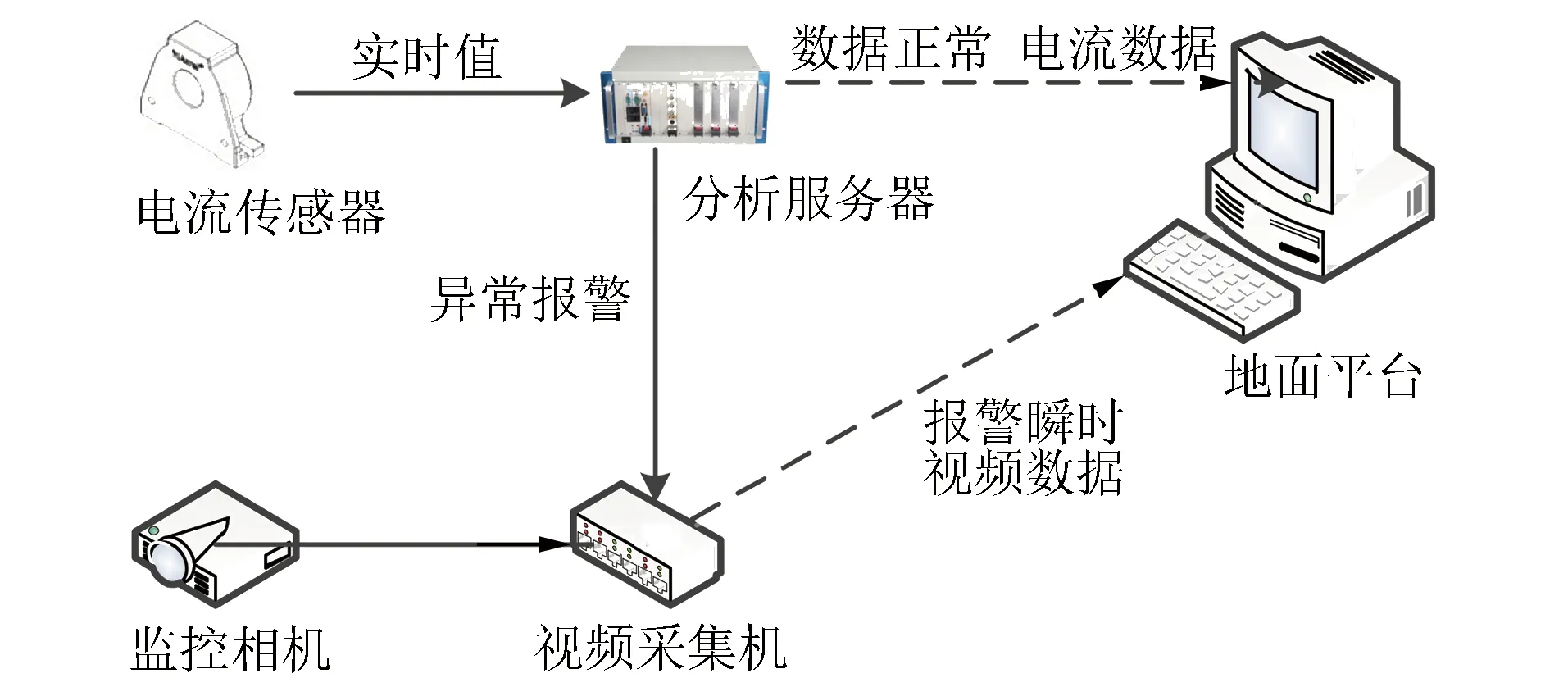
图5 靴轨监测系统的工作流程
3. 2 系统组成
靴轨视频监测系统主要由车下视频采集、电流传感器与传输设备、车内电源模块、交换机、分析服务器与视频采集服务器、地面中心服务器等组成。
所有从车下视频采集模块采集到的数据,通过网线传输到各车内的交换机内。交换机与车载主控服务器通信,主控服务器对数据进行存储和分析处理,并通过车地无线网络与控制中心的服务器进行通信。
3. 3 靴轨异常逻辑判断原理
靴轨监测逻辑判断的关键是当出现集电靴异常情况时必须准确无误地做出判断和报警,且不能在未出现靴轨异常时由于正、负集电靴电流的不平衡而判断为异常报警。因此,在逻辑计算中,要根据车辆辅助负载设计电流逻辑阈值是否高于最低负载电流值进行判断和计算;另外,在车辆非静态或惰行情况下进行的逻辑判断结果更加准确,并能够减少误报警。按此原则进行设计,其逻辑判断应包括:
1) 单节车辆正极性或负极性单个集电靴脱靴报警。对所有集电靴的电流监测适用。如果正极性或负极性的集电靴电流总值在55 A以上,监测到其中有集电靴电流值在1 A以下,且持续时间超过5 s,其异常集电靴则进行脱靴报警。
2) 单节车辆正极性或负极性单侧集电靴脱靴报警。对4节车辆之间的集电靴电流总和进行对比,如有车辆电流的平均值在1 A以下 ,同时有其他车辆所有集电靴正极性或负极性电流总值在50 A以上、持续时间为5 s以上时,对应的单节车辆所有集电靴脱靴报警。
3) 单节车辆正极性或负极性单侧集电靴脱靴接地报警。对每个车辆的集电靴电流值进行实时监测。如果系统监测到单个集电靴的电流值在600 A以上,则立刻脱靴报警;如果监测到正极性电流值总和与负极电流值总和不等,且两个总和的差值在50 A以上,则可以判断总和值比较大的那边极性有集电靴接地问题。取2个同极性集电靴中电流值较小的判断为集电靴脱落接地,启动报警机制。
4) 单节车辆正极性或负极性单侧集电靴脱靴受流不稳报警的第1种情况。对所有集电靴的电流监测适用。如正极性或负极性的集电靴电流总值在50 A以上、监测到其中有集电靴电流值在1 A以下且在1 min内累计持续时间在5 s以上时,其异常集电靴进行异常预警类型报警。
5) 单节车辆正极性或负极性单侧集电靴脱靴受流不稳报警的第2种情况。如果单侧电流值急速下降,其电流值的导数为接近于无穷大(电流值微分处理),即电流值急速下降,则可以判断集电靴有脱落风险,应进行脱靴预警。
6) 单节车辆正极性或负极性单侧集电靴脱靴受流不稳报警的第3种情况。将车内不同集电靴的数据离散程度进行分析,获取差异化,基于差异化进行分析,按照离散差异超过20%进行脱靴预警。
3. 4 试验验证
根据上述靴轨异常逻辑判断原理,对相关逻辑判断进行了实验室试验验证和实车试验验证。限于篇幅,本文仅给出实车测试中单个集电靴脱靴的电流数据。对单节车辆中的4个集电靴分别编号为1号、2号、3号和4号集电靴。在列车运行过程中,通过绝缘传动装置使3号集电靴脱离供电轨,满足了上文第1种逻辑判断:正负集电靴电流总值在55 A以上,3号集电靴电流值在1 A以下,且持续时间5 s以上,集电靴电流曲线如图6所示,因而监测系统触发3号集电靴脱靴报警,并将报警信息及图像值推送至控制中心。
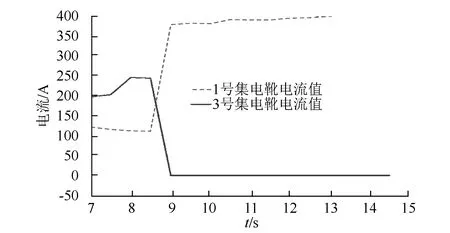
图6 集电靴电流曲线
4 结语
本文通过靴轨平顺性试验测试得到的结果是:
在连续的供电轨、接地轨区段,靴轨平顺性指标良好;而在道岔分段处,靴轨的平顺性受供电轨、接地轨的对齐精度影响较大。通过定期进行靴轨平顺性试验,对大量试验数据进行分析,统计出其振动加速度峰值数据,进行预防性维护,可极大地降低靴轨冲突事件的发生。
本文通过对靴轨视频监测系统的研究,实现了对无人驾驶APM系统列车靴轨状态的实时监测。该监测系统能自动识别并监测绝大部分靴轨运行的异常现象,可利用车地无线通信网络向控制中心推送故障报警信息和故障视频及图像,再由控制中心对所有列车进行集中管控。
靴轨平顺性测试为预防性维护提供了依据,结合运营过程中靴轨视频监测系统的应用,可极大地提高APM系统靴轨运营安全监测和管理维护效率。
