大范围近海舰船近红外遥感检测方法∗
2019-11-13罗兴潮黄文骞程益锋
罗兴潮 黄文骞 程益锋
(海军大连舰艇学院军事海洋与测绘系 大连 116013)
1 引言
近几十年,海洋资源被不断利用开发,濒海国家争夺海洋势力范围斗争加剧,作为沿海国家传统任务,舰船目标检测发挥着越来越重要的作用。随着遥感技术的不断发展完善,基于遥感手段进行舰船目标检测被广泛运用于各个领域。在民用方面,基于遥感的舰船目标检测可以进行海上舰船活动监测与交通管制、辅助海上救助、保障渔业监管、监测船舶污染等;在军用方面,可以侦查与监视敌军海上实力及重要军事目标、引导制导武器进行精确打击等[1~2]。可以看出,在实际应用中,舰船目标检测的区域多为近海,且检测范围较大。因此,如何实现高精度、高时效的大范围近海舰船目标检测一直是国内外的研究热点。
目前,基于遥感的舰船目标检测根据影像数据的不同,可以分为基于合成孔径雷达(Synthetic Aperture Radar,SAR)影像的舰船目标检测与基于光学影像的舰船目标检测[3]。SAR 遥感采用主动微波遥感技术,具有全天时、全天候、多极化、多视角、探测距离远、覆盖范围大以及一定的穿透能力等优势。光学遥感与SAR 遥感相比,虽不能全天候、全天时工作,但具有表达形式直观、图像信息量大、解译原理简单等优点[4]。近红外遥感作为光学遥感的重要部分,由于海水对近红外波段的吸收作用,水体反射率远小于陆地与水上目标,非常适合用于大范围近海舰船目标检测。为此,本文提出一种基于近红外遥感的大范围近海舰船目标检测方法。
2 检测流程
基于遥感的大范围近海舰船目标检测有别于一般的图像检测与识别,遥感影像的数据量大,海面背景下的舰船目标的面积小而模糊,又存在云团、陆地、岛屿、噪声等干扰,常规目标检测方法并不适用。为了快速、准确地检测船只,舰船目标检测的流程一般分为三个模块。如图1,首先是预处理模块,该模块的任务是对需要进行舰船目标检测的影像进行辐射校正、几何校正和海陆分离等预处理,得到去除陆地区域干扰的待检测影像;然后是粗检测模块,该模块的任务是完成对影像进行快速检测,得到疑似船只的目标切片;最后是精检测模块,该模块的任务是对粗检测出的目标切片进一步分析,排除非舰船目标,得到最终的舰船检测结果。
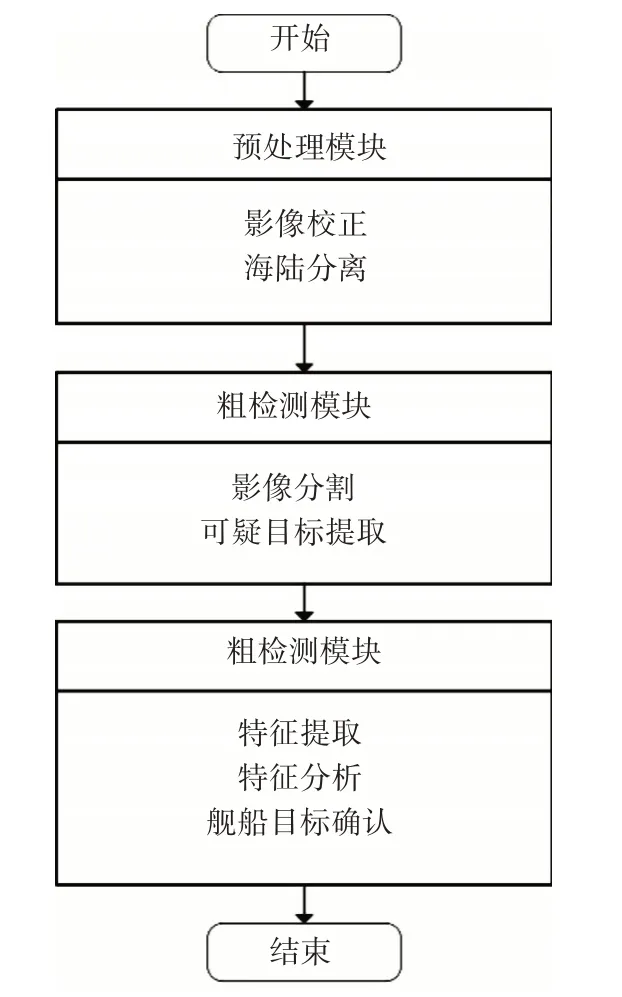
图1 舰船目标检测流程图
3 海陆分离
本文采用Landsat 8 的近红外波段(Near Infrared)数据,波段范围0.845μm~0.885μm,空间分辨率为30m,遥感数据产品都已经过系统辐射校正和几何校正,在进行舰船目标检测前,还需要对影像进行海陆分离。
海陆分离方法可以分为基于先验信息的海陆分离和基于图像特征差异的海陆分离两大类[5]。基于先验信息的海陆分离方法,需要借助现有的海岸线等先验地理空间信息,通过匹配来实现海陆分离[6~8]。基于图像特征差异的海陆分离是一种通用的,不需要其他信息或数据的数字图像处理方法,根据图像分割方法的不同,又可以分为基于边缘提取的海陆分离、基于阈值分割的海陆分离、基于区域生长的海陆分离以及结合特定理论的海陆分离[9~11]。阈值法是一种常用的图像分割方法,具有速度快、计算简单等优点,但难以精细分割,为了实现精准的海陆分离,本文使用一种改良的阈值分割方法进行海陆分离,先通过最大类间方差法确认阈值,对影像先进行粗分割,再通过形态学处理得到精细分割结果。
3.1 最大类间方差法
由于近红外波段的特性,在近红外遥感影像中陆地区域的亮度普遍大于海面区域,因此,在对影像进行阈值分割时,分割阈值应当使前景的平均灰度、背景的平均灰度与整个图像的平均灰度之间差别最大,Otsu 在1978 年提出了最大类间方差法[12],通过区域的方差来表示这种差异。该算法在判决分析最小二乘法原理的基础上推导得出,计算过程如下。
影像中,灰度为i 的像素数为ni,灰度范围为[0,L-1],则总的像素数为
各灰度值出现概率为
把图中的灰度值用阈值T 分成两个像素子集C0和C1,C0由灰度值在[0,T-1]的像素组成,C1由灰度值在[T,L-1]的像素组成。像素子集C0和C1的概率分别为
像素子集C0和C1的平均灰度分别为
整幅影像的平均灰度为

两个像素子集与整幅图像像素灰度的总方差为

让T 在[0,T-1]范围内依次取值,使σ2B 最大的T值便是最佳的区域分割阈值。
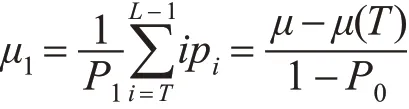
如图2,通过最大类间方差法得到的分割结果还比较粗糙,需要继续进行精细分割。
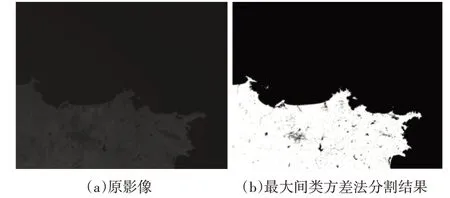
图2 海陆粗分割结果图
3.2 形态学处理
阈值分割后的影像,陆地与海面上还留有许多空洞与散杂点。本文采用一种迭代膨胀的算法对影像进行形态学处理(⊕表示膨胀、☉表示腐蚀),先填充陆地上的空洞,计算过程如下。
A 为一个待填充空洞,AL为集合A 的边界,先由一个3*3的8邻域结构元素B对A腐蚀,然后用A减去腐蚀得到AL:

对所有非边界点标记为0,然后将1 赋值给起始点P,下列过程将整个区域填充:

这里X0=P,C 是一个3*3 的4 邻域对称结构元素,AC是AL的补集。如果XK=XK-1,则算法在迭代的第K步结束。

图3 海陆精分割结果图
通过填洞,可以得到一片完整的陆地区域。除海上的散杂点同样使用迭代膨胀的算法,先将影像进行反色处理,然后重复填洞的步骤。如图3,通过形态学处理,得到分割好的二值图像,再将二值图像对原影像进行掩膜处理,便完成了海陆分离,得到海面背景下的待检测区域。
4 舰船目标检测
4.1 舰船目标粗检测
4.1.1 方差纹理滤波
经过海陆分离后的影像,舰船目标与海面背景相比亮度较高,适于检测,但由于大范围的海面背景灰度变化较大,不同区域的舰船目标亮度也存在差异,直接通过阈值法分割整幅影像的舰船目标与海面背景,会造成错判,导致大量舰船目标的漏检,如图4。针对这个问题,本文提出一种基于方差纹理的舰船目标检测方法。

图4 阈值分割结果图
纹理特征,是图像中普遍存在而又难以描述的特征,是数字图像处理中的一种重要的视觉线索。纹理特征分析技术一直是计算机视觉、图像分析、图像检索等领域的研究热点[13]。纹理特征分析根据描述方法的不同,可以分为以下几类:统计法、几何法、模型法、信号处理法和结构分析法,本文采用的是统计法。基于统计法的纹理特征分析是基于像素及其邻域的灰度属性,来研究纹理区域的统计特性。根据影像海面背景的灰度变化较小,而舰船目标亮度高的特点,本文使用3×3 窗口提取影像的方差纹理。实现方差纹理提取要对图像每个点重复下面操作。
1)计算原影像f(x,y) 的以点(i,j) 为中心的3×3邻域内的像素方差:

2)将1)的运算结果作为输出影像g(x,y)中点(i,j)新的响应。
如图5,经过处理后的影像,海面背景灰度大小与变化范围减小,舰船目标相对亮度增强。

图5 方差纹理影像
4.1.2 疑似舰船目标提取
影像经过方差纹理处理后,舰船目标在海面背景下变得清晰凸显,接下来,从影像上提取疑似舰船目标的亮斑。首先,对灰度影像进行二值化处理,将高亮度的目标从海面背景中分割出来,然后,通过闭运算弥合断裂目标的狭窄间隙,填充大目标的中空点。如图6,经过处理后,疑似的舰船目标已经从影像中初步分割出来,在海面背景上呈散状白点分布,但是仍存在许多点噪声、礁石与岛屿等非舰船目标。
图6 舰船目标粗提取结果图
4.2 舰船目标精检测
为了去除上一步提取结果中的非舰船目标,本文对舰船目标的特征进行提取与分析。首先,通过方差纹理滤波处理训练影像,提取影像中已知舰船目标1612 个。然后,计算每一个舰船目标的面积与长、短轴信息。其中,面积可以由像素个数表示;长、短轴可以由最小外接矩阵法求出。最后,通过统计分析目标特征得到,方差纹理滤波处理后的舰船目标在二值化影像中的像素面积范围为[9,240],长短轴比值范围为[1,4.1],如图7。
根据上述舰船目标特征分析结果,对照待检测影像中的疑似舰船目标的像素面积、长短轴比值,我们可以滤过不符合舰船特征的目标,得到最终的检测结果,如表1、图8。
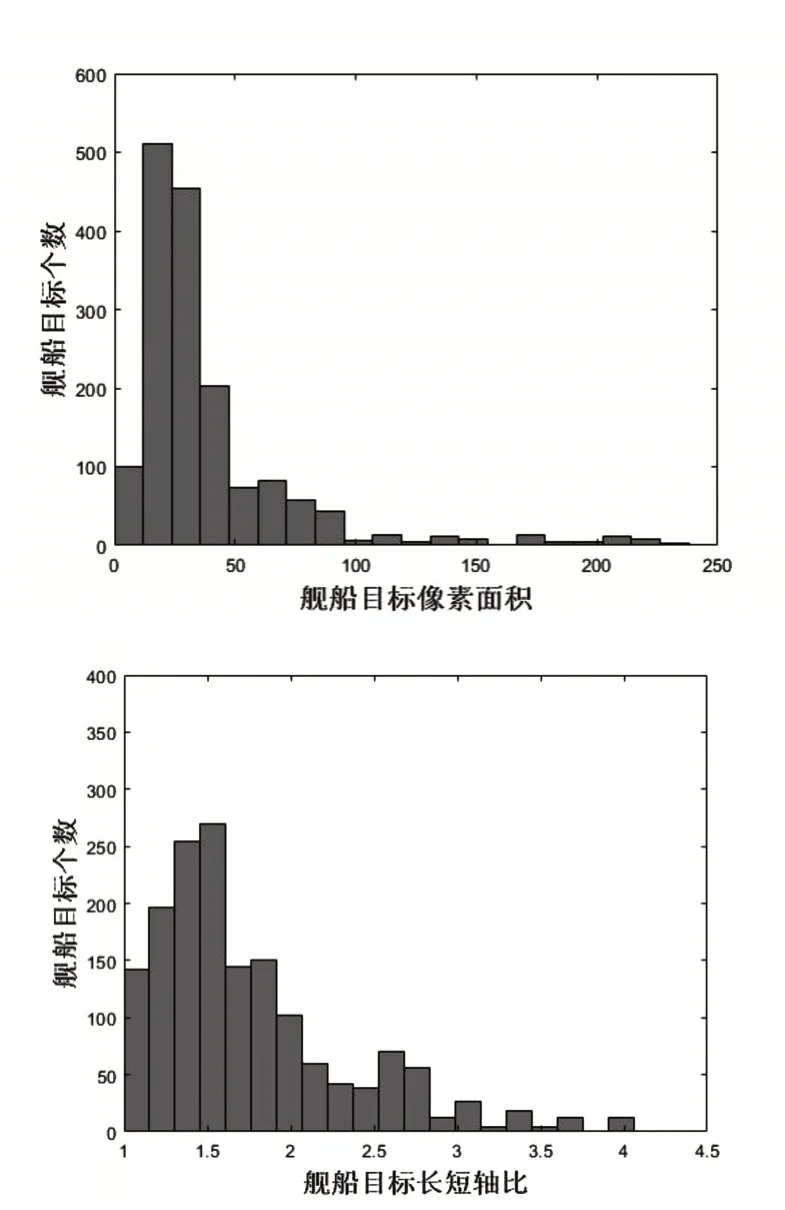
图7 舰船目标特征直方图
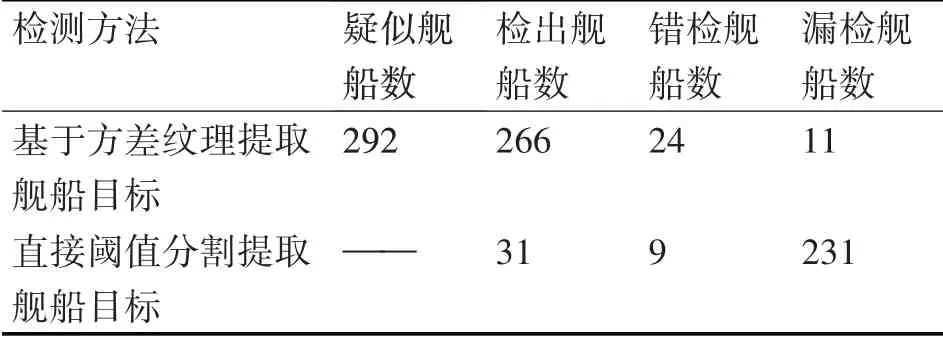
表1 实验结果

图8 舰船目标检测结果图
5 结语
本文利用水体对近红外波段吸收性强的特性,提出一种大范围近海舰船目标检测方法。在预处理阶段,采用了一种改良的阈值分割法对影像进行海陆分割,先基于最大类间方差法确认阈值对影像进行粗分割,再通过形态学处理得到海陆精分割结果。在检测阶段,通过方差纹理滤波器减小海面背景的灰度变化区间,增强舰船目标的相对亮度,从而分割出疑似舰船目标,最后经过特征分析排除非舰船目标,得到检测结果。实验结果表明,本方法能有效地检测的舰船目标,具有较高的精度。
