基于RBF 神经网络船舶传动电液恒功率调速自整定PID 控制∗
2019-11-13陈家璘
周 正 贺 易 陈家璘 詹 鹏 汤 弋 叶 露
(国网湖北省电力有限公司信息通信公司 武汉 430077)
1 引言
船舶传动电液调速系统是保障船舶传动顺利工作的关键系统之一,随着船舶传动工艺的进步,越来越多的电牵引船舶传动采用调速技术,目前一般常用交流变频调速和电磁调速[1~3]。交流变频调速主要有开关恒压比控制,电压空间矢量控制,直接转矩控制等几种控制形式,存在控制精度不高的缺陷;电磁调速电牵引船舶传动的调速装置多由模拟电路构成,虽具有响应快速、技术成熟的优点,然而参数一经确定,便不易改变,对控制对象的适应性差,且硬件设备复杂,安装调试困难[4~6]。
基于液压牵引的电液比例调速控制适用于具有大惯量的船舶传动控制系统,液压驱动方式的输出力和力矩较大,容易实现精确的自动化控制[7]。传统的PID 控制系统具有动态响应欠佳,参数调整不及时的问题[8~9]。RBF 神经网络具有很强的预测功能,能从及时反馈参数信息纠正结果[10~13]。本文采用RBF 神经网络自整定PID 技术对电液恒功率调速系统进行设计。
2 电液恒功率自动调速系统原理分析
电液恒功率自动调速系统原理如图1 所示,主要由调速液压缸、弹簧调速液压缸、调速块、电液伺服阀、伺服液压缸、主变量泵、梭阀、液压马达、阻尼管、链轮、调速套等组成[14~15]。调速液压缸用于将梭阀的输出压力转变为活塞杆位移,从而形成调速的压力反馈,伺服阀用于控制进入伺服液压缸的流量和压力,改变液压缸的位移,变量泵通过改变排量控制液压马达的转速,液压马达为执行机构和控制对象,变量泵和液压马达构成闭式的容积调速回路。
系统工作原理:给定电液伺服阀的电压值,通过比例电磁体驱动阀芯移动,控制输出流量的大小和方向,控制伺服液压缸活塞杆的位移,进而改变主变量泵的的斜盘倾角,从而改变变量泵的排量,控制流入液压马达的流量大小,从而达到控制液压马达的转速。
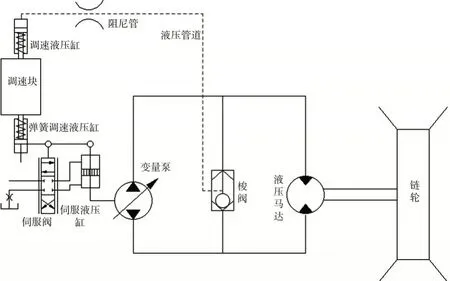
图1 电液恒功率自动调速系统原理图
3 RBF神经网络模型
径向基函数(Radial Basis Function,RBF)神经网络为一种单隐层的三层前馈网络,由输入到输出的映射为非线性的,而隐含层空间到输出空间的映射为线性的,因而大大加快了学习速度并避免局部极小问题,其结构见图2所示。
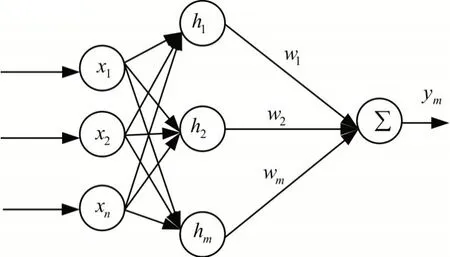
图2 RBF神经网络结构
RBF 网络以权值向量和阈值向量之间的距离作为自变量,该距离为通过输入向量和加权矩阵的行向量的乘积得到的,随着权值和输入向量之间距离的减小,网络输出为递增的,当权值和输入向量之间距离一致时,网络输出为1,阈值用于调节网络的灵敏度。
RBF网络的训练过程分为两步:第一步为无教师学习,确定输入层与隐含层间的权值;第二步为有教师学习,确定训练隐含层与输出层间的权值。训练前,需要提供输入向量,对应的目标向量和学习系数,训练的目的为求取两层最终权值和阈值。
在RBF 网络结构中,设X=[x1,x2,…,xn]T为网络的输入向量,H=[h1,h2,…,hj,…,hm]T,其中hj为高斯基函数:

网络第 j 个节点的中心矢量为Cj=[Cj1,Cj2,…,Cji,…,Cjn]T,其中,i=1,2,…,n。
设网络的基宽向量为:B=[b1,b2,…,bm]T,bj为节点j 的基宽度参数,且大于零。网络的权向量为

辨识网络的输出为

辨识网络的性能指标函数为

根据最梯度下降算法,输出权值,节点中心,节点基宽参数迭代算法为
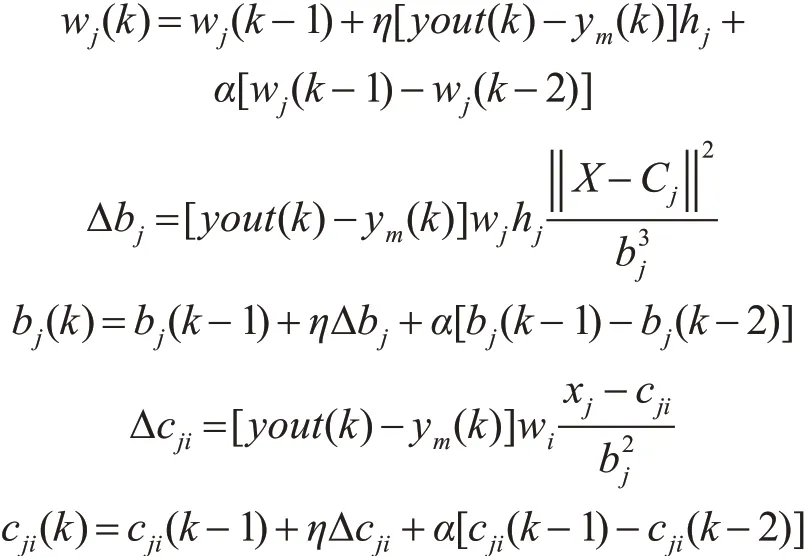
其中,η 为学习速率,α 为动量因子,Jacobian 矩阵的算法为
4 模型建立
4.1 基于RBF神经网络自整定PID控制模型
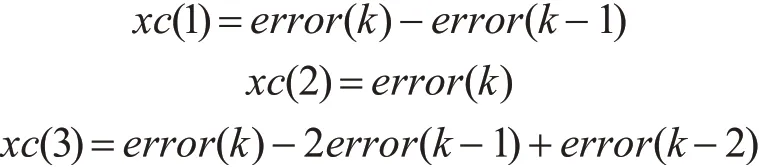
采用增量式PID控制算法,控制误差为

PID控制器的三项输入为
控制算法为
RBF神经网络的整定指标为

参数kp,ki,kd的调整采用最速梯度下降法:
4.2 电液恒功率自动调速模型
搭建基于RBF 神经网络自整定PID 的电液恒功率自动调速系统模型如图3 所示,其中控制系统的输出信号yout 与输入信号rin 比较,其偏差值error 作为PID 控制器的输入信号,PID 控制器的输出控制量u 作为电液调速系统和RBF 神经网络的输入信号,同时控制系统的输出信号yout和误差信号(yout-ymout)同时作为RBF 神经网络的输入信号,通过RBF网络调整其权值和基宽向量并通过辨识输出改变PID 控制器的参数kp,ki,kd值,以便于输出信号更好的跟踪输入信号,提高跟踪精度。
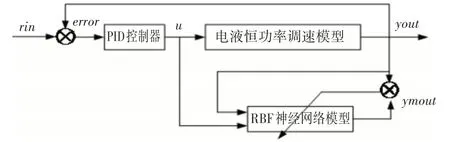
图3 基于RBF神经网络电液恒功率调速自整定PID控制模型
5 仿真结果
系统对于输入为方波信号的跟踪响应如图4所示,系统能够较好地跟踪方波输入信号,当输入为给定的调速信号时,系统输出速度能较好地跟踪给定的速度信号,因而系统的调速性能较好,系统的调速误差稳定在10%以内。
基于RBF 神经网络的自整定PID 控制时系统的实际输出与模型输出对比仿真结果如图5 所示,可知,系统的实际输出和模型输出的吻合度较好,两者之间的误差不超过5%,说明本文设计的RBF神经网络控制器是成功的,控制器的辨识的精度较好,能够实时反映系统的实际输出。系统的PID 参数曲线整体变化趋势与系统的实际输出曲线,模型输出曲线总体上成正相关的关系,从而说明PID 参数的调整根据系统实时输出进行,而PID 参数的调整值与系统实际输出和模型输出。
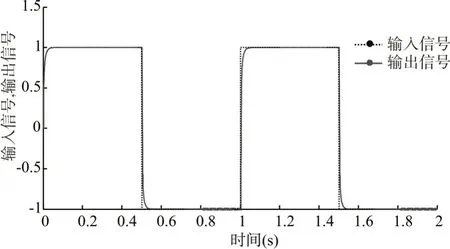
图4 输入方波响应
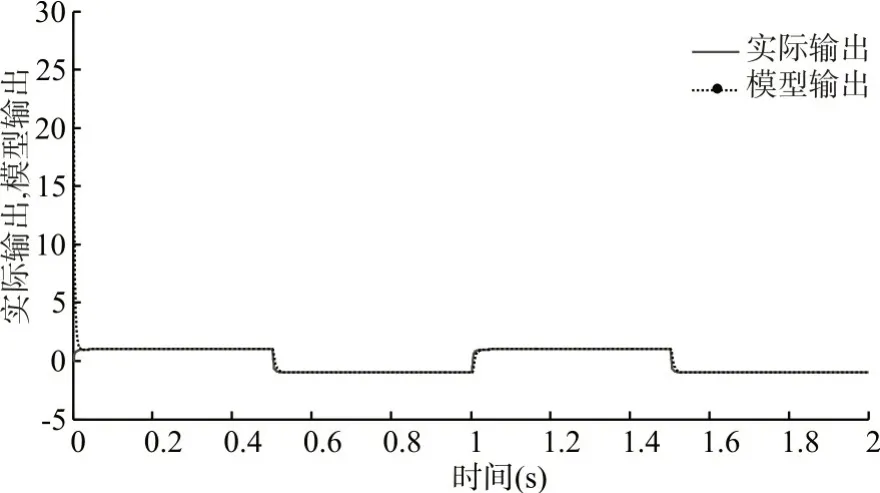
图5 输出结果
6 结语
船舶传动电液调速系统是保障船舶传动顺利工作的关键系统之一,本文在分析恒功率自动调速的电液控制系统原理的基础上,基于RBF神经网络的Jacobian 矩阵控制模型,引入自整定的PID 控制参数,建立了基于RBF神经网络自整定的电液调速系统PID 控制的数学模型。仿真计算得到系统的实际输出和模型输出的误差不超过5%,设计的RBF 神经网络的电液恒功率调速自整定PID 控制制具有更高的跟踪精度和响应特性,完全可以实现系统的高精度与快速的调速控制。
