红外导引智能航行控制系统设计与实现
2019-11-12温景松仲伟波冯友兵姚旭洋
温景松 仲伟波 冯友兵 姚旭洋
摘 要: 采用模块化设计方案设计并实现了一种基于红外信号导引的智能航行控制系统。该系统主要由红外导引信号采集模块、船模运动控制模块及驱动模块组成。采用双向比较分析方法处理接收到的红外导引信号,快速判定红外导引信号的方向。采用PID控制策略,通过调节脉宽调制信号的占空比控制船模的航速和航向。实船测试结果表明,双向比较分析法能够快速准确地判定红外导引信号方位,船模运动控制稳定可靠,高航速下也有较好的导引方向判定和航行控制效果。
关键词: 智能航行; 红外导引; 模块化设计; 双向比较分析; 信号处理; 航向判定; 实船测试
中图分类号: TN219?34; TP273 文献标识码: A 文章编号: 1004?373X(2019)20?0112?04
Design and implementation of intelligent navigation control system
guided by infrared signal
WEN Jingsong, ZHONG Weibo, FENG Youbing, YAO Xuyang
(School of Electronics and Information Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Abstract: An intelligent navigation control system based on infrared signal guidance is designed and implemented by means of modular design scheme. The system is composed of infrared guidance signal acquisition module, ship model motion control module and driver module. The received infrared guidance signal is processed by means of bidirectional comparative analysis method to quickly judge the azimuth of the infrared guidance signal. The PID control strategy is adopted to control the speed and course of ship model by adjusting the duty ratio of pulse width modulation signal. The actual ship test results show that the bidirectional comparative analysis method can quickly and accurately judge the azimuth of infrared guidance signal, make the ship model motion control stable and reliable, and has better guidance direction judgment and navigation control effect at high speed.
Keywords: intelligent navigation; infrared guidance; modular design; bidirectional comparative analysis; signal processing; course judgment; actual ship test
0 引 言
全國海洋航行器设计与制作大赛是我国船舶与海洋工程领域内最为重要的竞赛之一,其中船模智能航行比赛集船模设计和控制为一体,是大赛的比赛项目之一。船模智能航行比赛中船模自动捕获并跟踪红外导引信号,按照比赛系统给定的路线依次通过导引门,航线上共设10个引导门,引导门宽1.0 m,高0.4 m,每个引导门最大间距为20 m,赛道总长不超过150 m。引导门上有红外导引信号,波长940 nm,发射轴线与水面平行。比赛船模需在10 min内按照规定线路完成比赛则成绩有效,用时少者胜[1]。
根据全国海洋航行器设计与制作大赛船模智能航行的比赛规则,本文设计并实现了一种船模智能航行控制方案:船模采用单桨单舵运动控制方式,根据红外引导信号的特点,设计了红外引导信号获取方案和滤波处理方法,能够准确捕捉到导引门系统发出的红外引导信号,采用PID控制方法对船模的运动进行控制。所设计的红外信号导引智能航行控制方案已被多个船模采用,并在多次全国海洋航行器设计与制作大赛中获得优异成绩。
根据全国海洋航行器设计与制作大赛船模智能航行的比赛规则及其对动力的要求,选用单体单桨单舵的船体结构和运动控制模式,这种结构具有阻力小、航速快、航向调节灵活、反应速度快等优点。通过对成品船模加装红外引导信号采集盘和航行控制系统实现智能航行功能。其中红外引导信号采集盘高度要适中,既要保证能采集到红外导引信号,还要保持船体的重心尽量靠下,防止船模在高速转弯时发生侧翻。
1 系统硬件设计
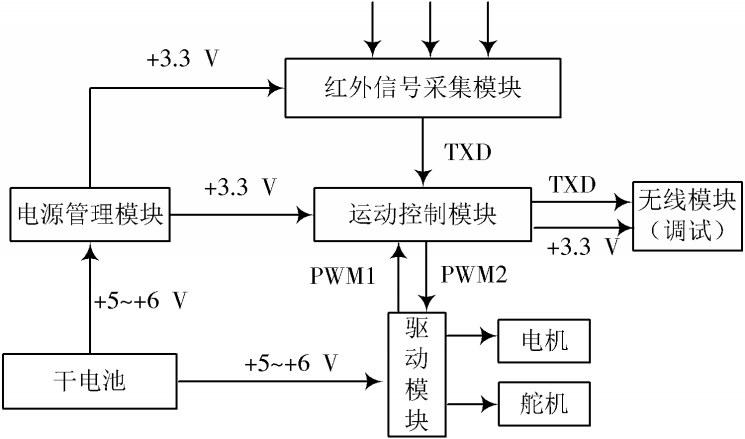
系统硬件是船模智能航行的基础,包括红外导引信号采集处理模块、运动控制模块和驱动模块,整个系统的架构如图1所示。
图1 智能船模控制系统架构图
根据船模智能航行的比赛规则,整个系统只能使用4节5号干电池。为了提高船模速度,需采用大功率驱动电机,但大功率驱动电机启动和运行时会导致电源输出稳定性差,从而影响整个系统的稳定性。为此采用超级电容来提升系统的电源稳定性和可靠性,选用4个100 F/2.7 V超级电容两两串联后并联作为红外导引检测和控制系统的电源,4节5号干电池通过单向二极管给电容充电,在大功率电机驱动运行时也可以保证系统的电源稳定和可靠。
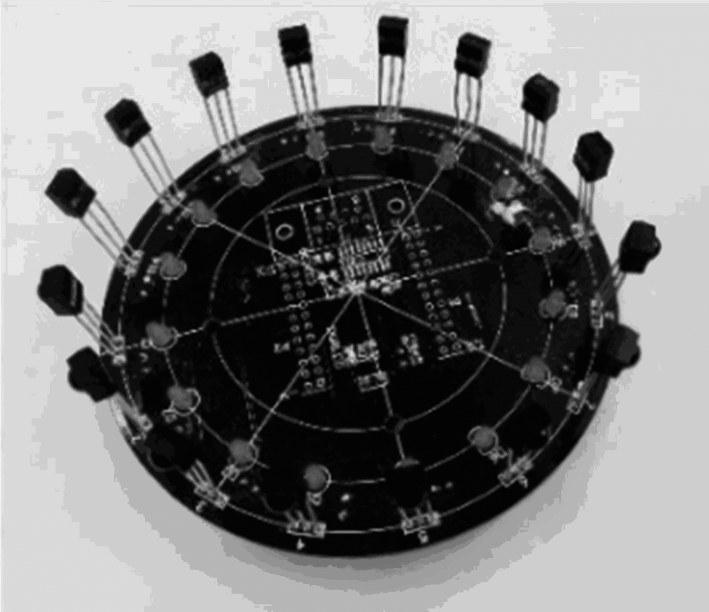
根据船模智能航行比赛的引导信号特点,采用TSOP34838红外一体化接收管作为红外信号检测传感器,如图2所示。将红外引导信号接收模块设计成圆盘形,圆盘边缘均匀布置16个红外信号检测传感器,外加黑色屏蔽罩减少噪声及相鄰方向红外信号干扰。为了方便调试与检测,当接收管接收到红外信号对应指示灯亮。红外引导信号检测电路实时将检测结果交由STC15W单片机进行处理,然后按设定频率向运动控制模块发送红外引导信号方向数据,运动控制模块据此进行控制。
图2 红外导引信号检测模块
控制模块主控芯片为STC15W系列芯片,该芯片接口多、集成度高、工作电压范围宽。采用单片机自带的两路PWM端口分别控制直流电机和舵机,取代使用定时器产生PWM信号的方法,有效节省了CPU资源[2]。驱动模块对运动控制模块输出的两路PWM信号进行处理,控制直流电机转速和舵机的转动角度,达到对船模航速和航向的控制。驱动模块PWM信号输入端先采用光耦进行隔离,经过NMOSFET管放大输出。上述方案可以有效减少电机工作电路部分对控制电路的影响,从而提高整个系统的稳定性和可靠性[3?4]。
2 控制系统软件设计
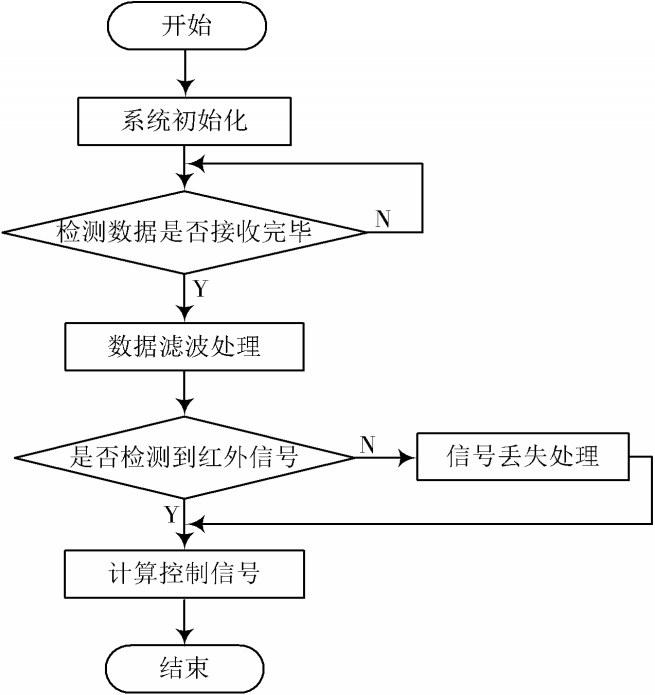
软件部分主要包括红外引导信号检测和数据处理,从而获取准确的引导信号方向,船模运动控制系统根据引导信号方向和当前的航速与航向,采用PID控制方法计算船模桨舵控制电机的工作参数,并由控制芯片产生对应的控制信号输出至驱动电路驱动电机,从而实现船模的运动控制[5?7]。系统软件流程图如图3所示。
根据规则,船模智能航行比赛中的红外引导信号符合NEC协议,即包括9 ms的高电平、4.5 ms的低电平、4个字节地址码和命令码。由此可知红外引导信号发射周期约为66 ms,并且一个周期内红外传感器可以接收到有效信号的时间约为27 ms,约占整个编码信号周期的40%。为此,系统每隔33 μs检测一次红外信号,如果端口检测到红外信号对此端口计数值加1,采集200次统计检测到红外信号的有效次数,若红外信号有效次数大于60次,则认为该方向有红外引导信号存在。
实际中红外引导信号采集盘会收到来自不同方向的红外信号,需要通过处理来确定红外引导信号的方向。本文采用双向比较分析方法进行信号处理,具体方法如下:
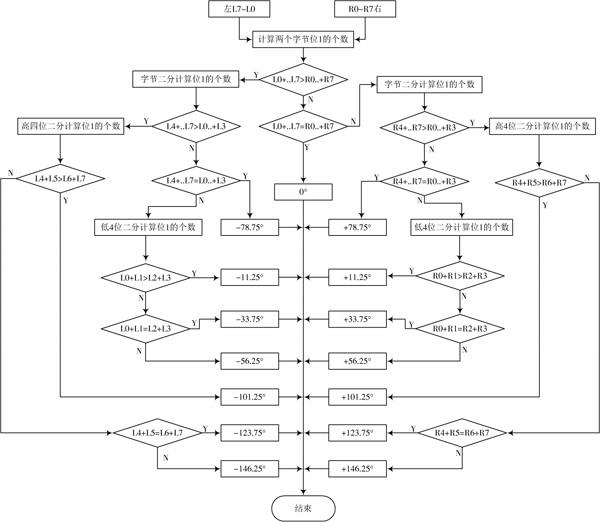
首先对接收到的信号进行预处理,把采集盘正后方传感器的信号丢掉,余下的15个信号提取出来分别存入2个字节中,正前方信号作为2个字节的公用位分别存入字节1和字节2中的L0和R0位,每一位分别代表对应红外接收传感器信号端的状态,状态1代表接收到红外信号,状态0代表无红外信号。高位代表最左边信号和最右边信号,具体处理流程如图4所示。
通过双向比较分析方法可以快速判断信号发射源的准确方位,负度数代表左偏方位,正度数代表右偏方位。
图3 控制系统软件流程图
船模航行过程中由于红外引导信号漏检,或者船模驶入信号盲区等原因造成短暂信号丢失,此时系统先保持船模直行,打开定时器监测信号丢失时间,当信号丢失时间超过设定时间,系统启动信号丢失处理策略,即船模立即降速并缓慢转弯并搜寻红外引导信号。
船模在水中的运动规律比较复杂,很难用一个精确的数学模型描述。PID控制是一种简单、控制参数物理意义明确、基于误差消除误差策略的控制算法,不依赖被控对象的数学模型也能够得到较好的控制效果,被广泛应用于系统闭环控制。本文采用PID控制方法对船模航向进行控制,船头方向和红外信号发射源的方向夹角作为PID控制器的偏差E输入,R(t)为0°,即船头方向正对红外发射源,控制器的输出为PWM脉宽,通过驱动模块控制舵机的偏转角度。航速主要根据船模的航向设定,船模航向角越大速度越小,当船模正对红外引导信号方向时速度达到最大[8?9]。
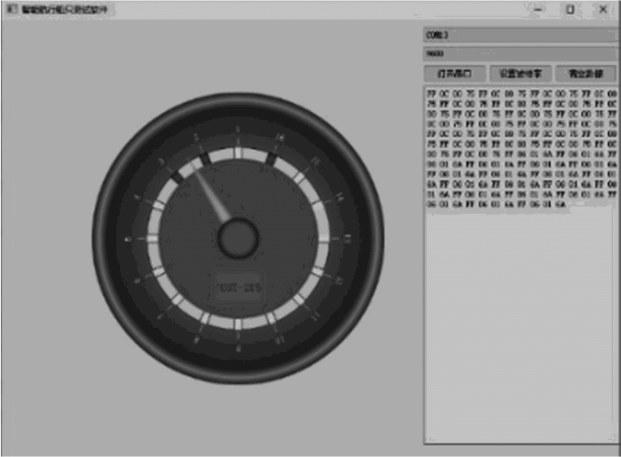
为了方便智能船模的调试,采用基于NRF24L01的短距离无线数据通信模块,在船模航行过程中通过上位机监测船模对红外信号的检测和滤波处理情况,为船模参数的调试提供参考[10]。图5为船模航行过程中某一时刻信号的采集和滤波处理情况,绿色指针代表滤波处理后输出的方位角。船模改造完成后先进行了各模块的功能测试,功能测试通过后又在船模智能航行比赛系统中进行了整体测试。测试结果表明,本文给出的设计结果满足船模智能航行比赛要求。
图5 上位机红外信号监测
3 结 语
根据全国海洋航行器设计制作大赛舰船智能航行比赛规则,从船模控制系统的可靠性、稳定性、精确性出发研制了一套软硬件结合基于红外引导的智能航行船模。智能航行船模的关键是红外引导信号的采集与处理,系统采用双向比较分析方法有效确保红外信号方位判断的正确性。通过上位机在线监测控制系统变量信息,经过多次试验对PID参数进行整定,获得了较好的航向航速协同控制效果。基于上述设计方案完成的船模参加了多届全国海洋航行器设计与制作大赛智能航行比赛,获得优秀成绩,证明了本文给出的设计方案稳定可靠。
参考文献
[1] 中国造船工程学会.第七届全国海洋航行器设计与制作大赛评分细则[EB/OL].[2017?04?28].http://www.csname.org.cn/qghyhxqds/323955.htm.
Chinese Society of Naval Architecture and Marine Engineering. The seventh national ocean navigator design and production competition rules [EB/OL]. [2017?04?28]. http://www.csname.org.cn/qghyhxqds/323955.htm.
[2] 高正中,赵晨晖,宋森森.基于STC15 MCU的微型四轴飞行器设计[J].现代电子技术,2016,39(24):145?148.
GAO Zhengzhong, ZHAO Chenhui, SONG Sensen. Design of micro four?axis vehicle based on STC15 MCU [J]. Modern electronics technique, 2016, 39(24): 145?148.
[3] 胡发焕,邱小童,蔡咸健.基于场效应管的大功率直流电机驱动电路设计[J].电机与控制应用,2011,38(4):21?24.
HU Fahuan, QIU Xiaotong, CAI Xianjian. Design of high?power driver for DC motor base on MOSFET [J]. Motor and control applications, 2011, 38 (4): 21?24.
[4] 陈柯,李媛媛,方璇.单片机驱动电机的设计与实现[J].实验室研究与探索,2016,35(3):119?122.
CHEN Ke, LI Yuanyuan, FANG Xuan. Design and implementation of driving motor based on MCU [J]. Laboratory research and exploration, 2016, 35(3): 119?122.
[5] 刘海旗,何军红.基于AVR单片机的红外导航无人船的设计与实现[J].工业仪表与自动化装置,2015(4):47?50.
LIU Haiqi, HE Junhong. Design and implementation of infrared navigation unmanned ship based on AVR [J]. Industrial instrument and automation device, 2015(4): 47?50.
[6] 朱春华,顾雪亮.基于红外反射式传感器TCRT5000的循迹小车设计[J].现代电子技术,2018,41(18):143?146.
ZHU Chunhua, GU Xueliang. Track car design based on infrared reflective sensor TCRT5000 [J]. Modern electronics technique, 2018, 41(18): 143?146.
[7] 史晓娟,李松博.基于AVR单片机的嵌入式可编程控制系统[J].仪表技术与传感器,2017(6):54?58.
SHI Xiaojuan, LI Songbo. Embedded programmable control system based on AVR MCU [J]. Instrument technology and sensors, 2017(6): 54?58.
[8] 马娅婕,彭攀来,刘国庆,等.基于梯度下降法和双环PID的四旋翼飞行器的研究与设计[J].现代电子技术,2017,40(18):11?14.
MA Yajie, PENG Panlai, LIU Guoqing, et al. Research and design of Four?rotor aircraft based on gradient descent method and double?loop PID [J]. Modern electronics technique, 2017, 40(18): 11?14.
[9] 王祎晨.增量式PID和位置式PID算法的整定比较与研究[J].工业控制計算机,2018,31(5):123?124.
WANG Yichen. Comparison and research on setting of incremental and positional PID algorithms [J]. Industrial control computer, 2018, 31(5): 123?124.
[10] 胡邓华,冯刚,孙际哲.基于STC单片机的数字采控电路设计[J].现代电子技术,2018,41(8):53?56.
HU Denghua, FENG Gang, SUN Jizhe. Design of digital acquisition and control circuit based on STC single chip computer [J]. Modern electronics technique, 2018, 41(8): 53?56.