基于预估模糊PID的冰蓄冷空调控制系统
2019-11-12赵巍李房云
赵巍 李房云



摘 要: 针对冰蓄冷空调的运行控制策略复杂、控制效果不佳的问题,文中提出一种基于预估模糊PID的冰蓄冷空调控制系统。该控制系统在PID控制器的基础上加入了Smith预估器,来预测推理PID参数的变化量。并使用控制系统、空气处理装置、风管系统和变风量末端4部分,实现对冰蓄冷空调的实时控制。在正常工作与复杂工况条件下的仿真实验结果表明,所提出的方法具有更快的响应能力和良好的控制效果。
关键词: 冰蓄冷空调; 控制系统; 模糊PID; 预估推理; 动态特性; 仿真实验
中图分类号: TN876?34; TP273 文献标识码: A 文章编号: 1004?373X(2019)20?0026?03
Ice storage air?conditioner control system based on predictive fuzzy PID
ZHAO Wei, LI Fangyun
(Institute of Technology, East China Jiaotong University, Nanchang 330100, China)
Abstract: As the ice storage air?conditioner has the problems of complex operation control strategy and poor control effect, an ice storage air?conditioner control system based on predictive fuzzy PID is proposed. The Smith predictor is added into the control system on the basis of PID controller to predict and infer the variable quantity of PID parameters. The real?time control of ice storage air?conditioner is realized by using the four units (control system, air handling device, duct system and variable air volume end). The results of the simulation experiment under the normal working and complex working conditions show that the proposed system has faster response capability and better control effects than the previous system.
Keywords: ice storage air conditioning; control system; fuzzy PID; predictive inference; dynamic characteristics; simulation experiment
0 引 言
隨着我国面临的能源问题日益严峻,其中电力供需矛盾尤为突出,存在着电网负荷率低、电网峰谷差大和高峰期电能供应不足的问题[1?2]。随着人们对建筑环境要求的提高,建筑能耗已占总能耗的30%,其中空调系统用[3]电占比达40%~60%。然而,大量的空调用电加大了电网峰谷的负荷差[4]。因此,实现空调系统的削峰填谷具有重要的意义。为了优化调控冰蓄冷空调的运行策略,保证持续稳定降温的目的,众多专家和学者建立了冰蓄冷空调的运行模型并设计了相应的运行控制步骤[5?6]。如文献[7]中建立了机组配置方法,并提出一种适用于工程设计的运行优化步骤;文献[8]中建立了冰蓄冷空调的能耗模型,并将其简化为只含有两个独立变量的函数,实现了不同负荷需求下的机组配置方案;文献[9]建立了机组优化控制系统,根据逐时预测的负荷结果来测量剩余能量并指导预测控制。
本文针对冰蓄冷空调运行控制策略的复杂性问题,从控制策略与控制系统理论入手,提出一种基于预估模糊PID控制的冰蓄冷空调控制系统,同时,还搭建仿真实验平台分析了所提控制方法的性能。
1 冰蓄冷空调模型
冰蓄冷空调的温度控制系统通常由空气处理装置、风管系统、控制系统和变风量末端4部分组成。为了便于分析,对于冰蓄冷空调的温度变化特性,使用一阶模型描述其动态特性:
2 预估模糊PID控制
本文的预估模糊PID控制系统由模糊PID控制器和Smith预估器组成。其中,模糊PID控制器是在传统PID控制器的基础上加入模糊推理环节构成。该模糊推理环节将PID参数变化量作为输入参数,以优化调整PID参数,使模糊推理系统具有更优的动态性能。Smith预估器通过在反馈回路中加入Smith预估环节,来消除被控对象的惯性和时滞。
本文模糊控制系统的整体结构如图1所示。其中,[G1(s)]为风管系统控制模型,[G2(s)]为冰蓄冷空调末端风阈模型,[Hs(s)]为Smith预估器,[H1(s)]为温度控制函数。该模糊控制系统将接收到的温度偏差e和温度变化速率ec作为输入,并进行模糊推理后得到[ΔKP,ΔKI,ΔKD],基于[ΔKP,ΔKI,ΔKD]值在线调整PID控制器,实现冰蓄冷空调的控制优化。
图1 模糊控制系统整体结构
2.1 Smith预估器的设计
Smith预估器通过在被控对象的传递函数前加入补偿环节,来超前反映本该滞后的输出量[10?12]。Smith预估器针对被控对象的大惯性和大滞后的特点来提前调整超调量,从而改善系统的动态特性并消除系统的不利影响。
2.2 模糊控制器的设计
本文从系统变量与输入参数模糊化、模糊逻辑判断和模糊知识库的建立以及输出参数模糊化等方面介绍模糊控制器的设计。根据冰蓄冷空调的特点,设定温度偏差e和温度偏差变化率ec作为本文模糊控制系统的输入,其PID控制关系为:
式中,[KP,KI,KD]分别为比例增益、积分增益和微分增益。因此,设置[ΔKP,ΔKI,ΔKD]作为模糊控制器的输出量。由于输入量e,ec和输出量[ΔKP,ΔKI,ΔKD]均为精确量,故使用负大、负中、负小、零、正小、正中和正大对这些量进行模糊化。
各模糊量的论域如表1所示。同时,本文采用Mamdani规则和if?then模式得到如表2所示的模糊规则表。
表1 模糊论域表
3 仿真与分析
为了验证本文所提控制方法的有效性,使用Simulink模块进行仿真验证。通过比较在正常工作和复杂工况条件下,本文控制方法与传统PID控制方法的适应性来验证所提出方法的有效性。
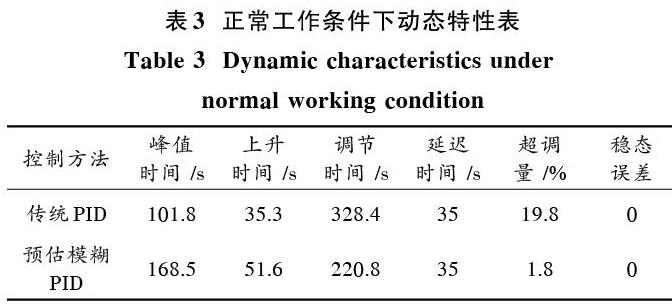
表3为各种方法在正常工况下的运行结果。从表中可以看出,预估模糊PID控制方法只有1.8%的超调量,相比于传统方法降低了18%,表明所提出的方法具有更优的平稳性;同时,还可以看出所提方法的调节时间有220.8 s,表明其具有更快的响应能力。
表3 正常工作条件下动态特性表
假设在复杂工况条件下,空调换气次数提升为20 次/h,测试结果如表4所示。从表中可以看出,预估模糊PID控制方法的调节时间为149.5 s,超调量为1.89%。而传统PID方法的调节时间为234.6 s,超调量为24.8%。表明预估模糊PID控制方法在复杂工况条件下具有远好于传统方法的性能。
表4 复杂工况条件下动态特性表

4 结 语
本文提出一种基于预估模糊PID控制的冰蓄冷空调控制系统。该系统由空气处理装置、风管系统、控制系统和变风量末端4部分组成,使用Smith预估器给出了PID参数变化量的推理结果,使用模糊PID控制器实现对PID参数的控制。仿真验证结果表明,所提方法具有更快的响应能力与控制效果。
参考文献
[1] 徐敬召,李声晋,卢刚,等.基于模糊PID算法的双闭环电机伺服系统设计[J].微特电机,2013,41(10):40?43.
XU Jingzhao, LI Shengjin, LU Gang, et al. Design of double closed?loop servo control system based on algorithm of fuzzy PID [J]. Small & special electrical machines, 2013, 41(10): 40?43.
[2] 周凯,杨嵇森.磁粉离合器自调整模糊PID励磁控制技术[J].电机与控制学报,2017,21(2):87?93.
ZHOU Kai, YANG Jisen. Self?tuning fuzzy?PID excitation control technology for magnetic particle clutch [J]. Journal of motor and control, 2017, 21(2): 87?93.
[3] 郑刚,李斌,梁于州.模糊自适应PID控制的恒张力收卷系统研究[J].现代电子技术,2017,40(21):132?135.
ZHENG Gang, LI Bin, LIANG Yuzhou. Research on constant tension winding system based on fuzzy self?adaptive PID control [J]. Modern electronics technique, 2017, 40(21): 132?135.
[4] 赵运达.模糊自适应PID在數控进给伺服系统的运用[J].自动化与仪器仪表,2017(11):201?203.
ZHAO Yunda. Application of fuzzy adaptive PID in CNC feed servo system [J]. Automation & instrumentation, 2017(11): 201?203.
[5] 刘姣娣,曹卫彬,许洪振,等.自动补苗装置精准定位自适应模糊PID控制[J].农业工程学报,2017(9):45?52.
LIU Jiaodi, CAO Weibin, XU Hongzhen, et al. Precise positioning and adaptive fuzzy PID control of automatic seedling?repairing device [J]. Journal of agricultural engineering, 2017(9): 45?52.
[6] 雷泰,赵荣耀,袁方,等.基于模糊自适应的PID控制器研究[J].智慧电力,2016,44(6):64?68.
LEI Tai, ZHAO Rongyao, YUAN Fang, et al. Study on PID controller based on fuzzy adaptive [J]. Smart power, 2016, 44(6): 64?68.
[7] 谢治军,郑丽娟,屈召贵.改进粒子群算法的永磁同步电机PID控制器[J].现代电子技术,2017,40(7):139?142.
XIE Zhijun, ZHENG Lijuan, QU Zhaogui. PID controller of permanent magnet synchronous motor based on improved particle swarm optimization [J]. Modern electronics technique, 2017, 40(7): 139?142.
[8] 王志超,董明利,刘超,等.基于模糊PID的流式细胞仪液流主从控制系统[J].液压与气动,2017(2):45?50.
WANG Zhichao, DONG Mingli, LIU Chao, et al. Master?slave control system of flow cytometer based on fuzzy PID [J]. Hydraulic and pneumatic, 2017(2): 45?50.
[9] 裘智峰,黄灯,桂卫华,等.基于变论域插值模糊PID控制系统的研究与应用[J].仪器仪表学报,2008,29(11):2435?2440.
QIU Zhifeng, HUANG Deng, GUI Weihua, et al. Study and application of the control system based on interpolation algorithm fuzzy?PID with variable universe [J]. Chinese journal of scientific instrument, 2008, 29(11): 2435?2440.
[10] 葛楠,李铁鹰,王宇慧.变论域模糊PID算法在供热控制中的应用[J].科学技术与工程,2012,12(34):9203?9206.
GE Nan, LI Tieying, WANG Yuhui. The application of variable universe fuzzy PID algorithm in heating control system [J]. Science technology and engineering, 2012, 12(34): 9203?9206.
[11] 王丽梅,张宗雪.H型精密运动平台交叉耦合模糊PID同步控制[J].沈阳工业大学学报,2018,40(1):1?5.
WANG Limei, ZHANG Zongxue. Cross?coupled fuzzy?PID synchronization control for H?type precision motion platform [J]. Journal of Shenyang University of Technology, 2018, 40(1): 1?5.
[12] 刘军,刘振旺,陈建恩,等.基于模糊PID对转子系统的非线性振动控制的研究[J].系统仿真学报,2017,29(1):200?205.
LIU Jun, LIU Zhenwang, CHEN Jianen, et al. Research on nonlinear vibration control of rotor system based on fuzzy PID [J]. Journal of systems simulation, 2017, 29(1): 200?205.