自动泊车系统模型设计
2019-11-12彭湘灵
彭湘灵
摘 要:设计并制作一套具有自动泊车功能的智能小车和停车场管理的自动泊车系统,小车以STC15W4K32S4单片机为控制核心,系统由电机驱动模块、红外防碰撞模块、超声波测距模块、LCD显示模块等部分组成。单片机产生两路PWM波控制小车的转向和速度,防碰撞模块采用红外对管检测小车在行驶过程遇到的障碍物,超声波测距模块用于测量小车在泊车过程中车身与车库墙壁之间的距离,LCD显示模块用于显示小车的当前距离等基本信息。测试结果表明,系统性能稳定,小车能实现智能防碰撞和自动泊车功能。
关键词:智能小车;自动泊车;红外防碰撞;超声波测距;单片机
中图分类号:U463.6 文献标志码:A 文章编号:2095-2945(2019)29-0037-03
Abstract: A set of intelligent car with automatic parking function and automatic parking system with parking lot management are designed and made. The car is controlled by STC15W4K32S4 single chip microcomputer. The system is composed of motor drive module, infrared anti-collision module, ultrasonic ranging module, LCD display module and so on. The single chip microcomputer produces two PWM waves to control the steering and speed of the car, and the anti-collision module uses infrared pair tube to detect the obstacles encountered by the car during driving. The ultrasonic ranging module is used to measure the distance between the car body and the garage wall in the parking process, and the LCD display module is used to display the current distance and other basic information. The test results show that the performance of the system is stable, and the car can realize the function of intelligent anti-collision and automatic parking.
Keywords: intelligent car; automatic parking; infrared anti-collision; ultrasonic ranging; single chip microcomputer
1 系统方案设计
1.1 自动泊车原理分析
自动泊车系统就是一种凭借检测车辆周边情况和路径来寻找最合适的泊车地点,借此来调整车辆的转弯半径、车速、停车方位和前后位置移动,使得车辆能够在系统的控制中自主的驶入泊车库的系统。
自动泊车系统可分为控制部分和信号检测部分。为了使小车能正常的进入车库,因此停车场控制系统需要有一个引导系统,把小车正确的引导到车库前,并通过测距传感器实现入库、停车、再到出库的一系列动作,使小车能进行智能停车。
1.2 系统方案设计
根据设计任务要求,本系统要进行停车场及停车场控制装置、智能小车以及辅助系统设计。
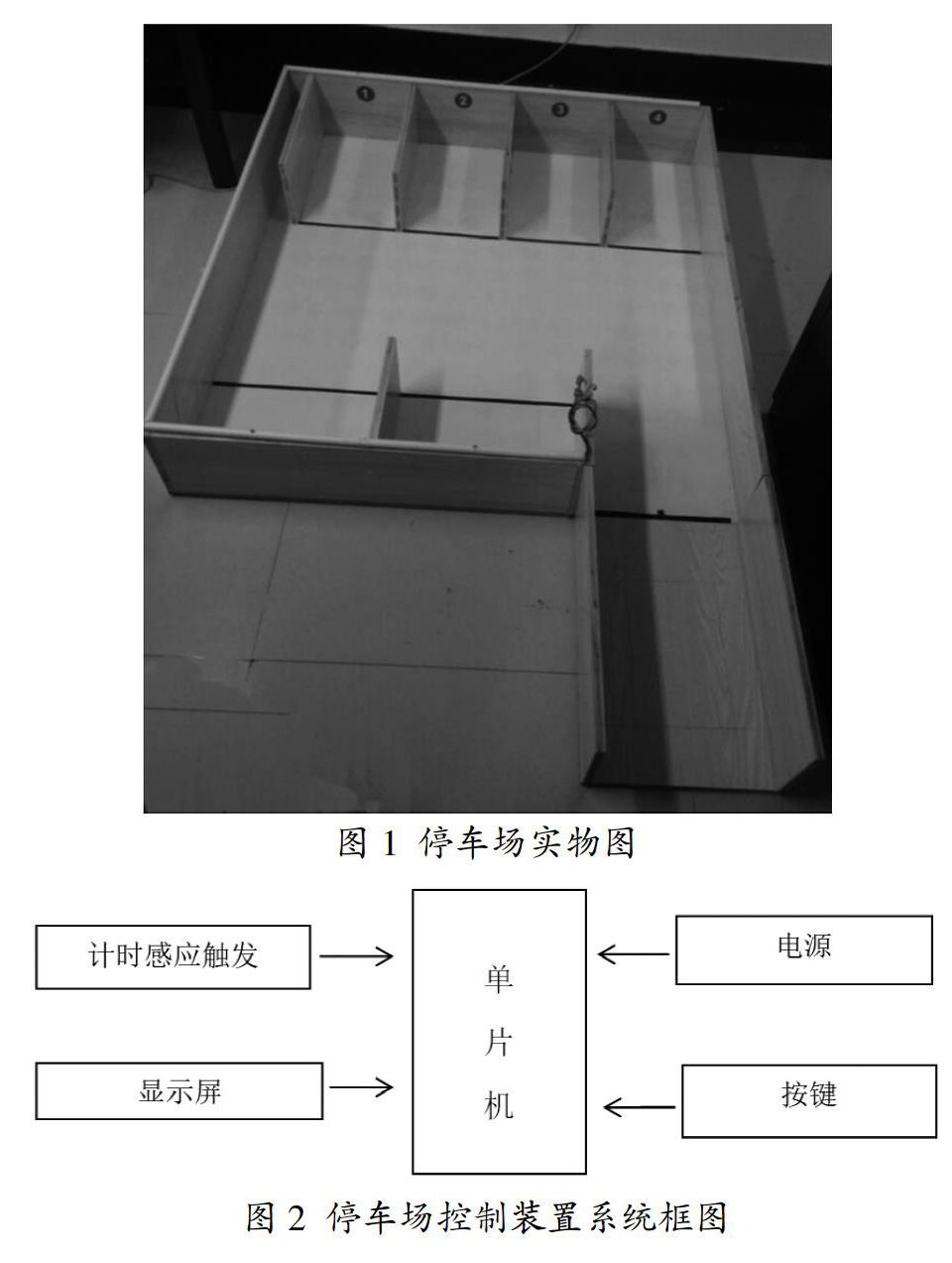
(1)停车场地分停车场和导向车道两部分,加工制作采用木工板制作,底板用2cm厚的120cm×120cm大芯板制作,板上的隔板也是2cm厚的大芯板制作,车库尺寸按要求制作;车库指示灯采用LED灯,沿外隔板布线采用线管隐藏;计费线和车库线粘贴宽度为1cm黑色胶带。停车场实物图如图1所示。
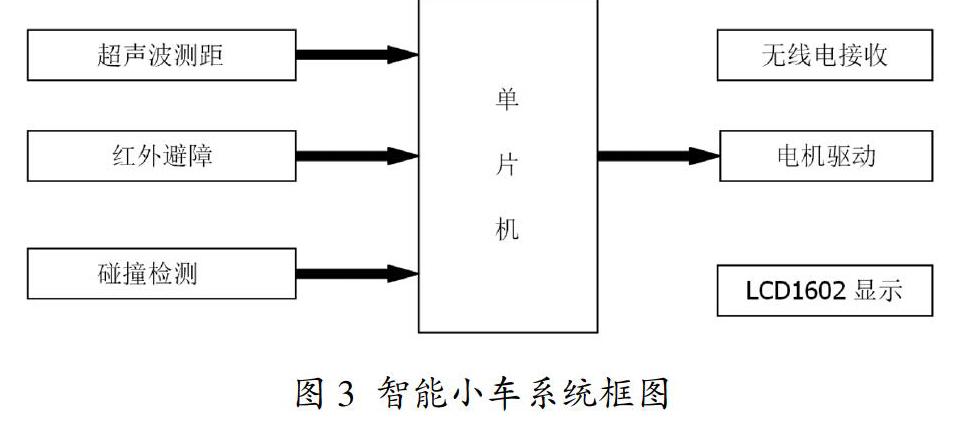
(2)停车场控制装置包括控制板、车库指示灯、计费及显示系统,主要由单片机、LCD显示屏、LED灯、计时感应传感器等构成,该部分框圖如图2所示。
(3)智能小车以及辅助系统包括底盘、驱动电机及驱动模块、测距离模块、防撞模块、碰撞检测模块、无线电信号接收模块、电源以及其他辅助系统,主要由单片机、电机驱动电路、超声波传感器、红外传感器、碰撞检测传感器、LCD显示屏、蜂鸣器、18650锂电池以及其他构成,该部分框图如图3所示。
2 电路与程序设计
2.1 电路设计
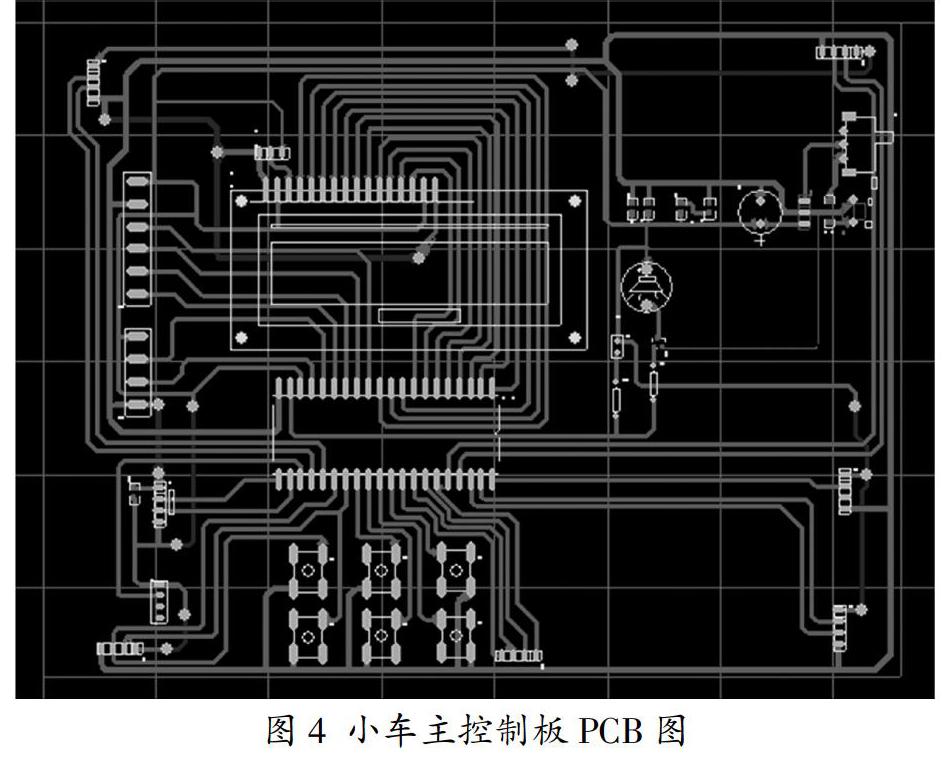
电路设计包括以下几个方面,小车控制板PCB如图4所示:
(1)电机驱动模块电路
(2)STC15W4K32S4单片机最小系统
(3)红外感应电路
(4)超声波模块电路
(5)红外感应模块电路
(6)震动检测模块电路
2.2 程序设计
整个系统的功能由硬件电路配合软件来实现,控制系统的核心是主程序,主程序调用了五个子程序,分别为液晶显示程序、按键处理程序、红外传感器检测、单片机接收控制程序、超声波传感器等等。
系统上电后,控制系统发车指令,然后智能小车接收信号,按预设指令形式,图5为程序流程图。
2.3 停车场场地数据采集
程序设计时,要对场地信息进行采集,采集小车进入各个车库时候的主要转弯点信息前距离(F)、后距离(A)、左距离(L)、右距离(R),采集如下(表1-表6)。
3 系统测试方案与测试结果
3.1 测试条件
经多次检查,硬件电路和仿真电路须与系统原理图相同,且检查无误,硬件电路保证无虚焊、短接等现象。
硬件测试:首先检查硬件电路,结果正常。定位信息测试:先保持小车在起点位置,记录数值,再将小车移到终点位置,记录对应数值。
3.2 测试方案
小车以一定速度沿直线移动,依次使超声波传感器位于停车场的所述侧面上距地面位置处并在泊车控制器中,记录超声波传感器距地面的不同值,且超声波传感器每处于一个高度位置,就通过泊车控制器实时获取该超声波传感器输出的脉冲信号,并对该脉冲信号进行处理,达到自动正确驶入车库的效果。
3.3 测试结果完整性
一共1~6六个车库,每个车库都测试了几百次,每个车库的入库率非常高。记录了无数次自动计费功能,都已成功。声光信息与碰撞功能都很完善。软件上机调试:将编写好的程序下载到单片机中,让硬件按竞赛要求工作起来测试入库、出库、计时、计费、碰撞及记录显示,误差通过软件程序的调节来达到要求,测试部分完成(表7)。
参考文献:
[1]王静霞.单片机应用技术(C语言版)[M].电子工业出版社,2012.
[2]徐科军.传感器与检测技术[M].电子工业出版社,2008.
[3]张华林,周晓芳.电子设计竞赛实训教程[M].北京航空航天出版社,2007.
[4]孙余凯.电子实用电路集锦[M].电子工业出版社,2008.
[5]别传爽.单片机原理与应用[M].北京理工大学出版社,2010.
[6]李响初.实用电子控制线路200例[M].中国电力出版社,2009.
