具有输入饱和约束的永磁同步电机伺服系统鲁棒有限时间控制
2019-11-12郭一军
郭一军
(1.黄山学院 机电工程学院,安徽 黄山 245041;2.浙江工业大学 信息工程学院,杭州 310032)
0 引 言
近年来,永磁同步电机由于体积小、成本低、执行效率高、输出转矩大、调速性能好等优点,在机器人、高精度数控机床的伺服系统中获得了广泛的应用[1-3]。但在实际的伺服系统中存在诸如系统摩擦力、电机参数变化、电磁干扰和负载扰动等不确定性因素,以及伺服系统执行机构输入饱和约束,这些问题的存在不仅会严重影响系统的控制精度,甚至会引起系统的不稳定性。因此,如何更好地处理伺服系统不确定性因素和输入饱和约束问题对于提高系统的跟踪精度具有重要意义。
在实际的控制系统中,执行机构由于受物理条件限制,当控制器输出信号过大时,执行机构的输出将进入非线性饱和状态,出现控制器输出的信号与被控对象实际接收的信号不一致的现象,从而导致系统控制性能下降,甚至引起系统失稳[4-5]。目前,关于控制系统输入饱和约束问题,国内外学者开展了相关研究并取得了一定的研究成果。文献[6]针对一类具有输入饱和约束的不确定非线性系统鲁棒自适应控制问题,采用光滑双曲正切函数近似逼近饱和约束函数以达到消除饱和的目的,但该控制算法设计过于复杂,不利于实际工程应用。文献[7]为解决直流伺服系统的饱和约束问题,利用模糊神经网络补偿策略对饱和约束进行补偿,但神经网络在线学习过程需要一定的时间。文献[8-9]研究了存在控制输入饱和约束的离散时间线性变参数系统的H保性能控制问题,控制算法通过将系统的饱和约束处理为一个线性矩阵不等的方法来达到抗饱和的目的。
滑模控制由于对系统参数不确定性和有界扰动具有很强的鲁棒性,被广泛应用于伺服系统的高精度控制中。但普通滑模控制律只能做到系统状态变量的渐近收敛,即从理论上来讲,系统状态变量只有当时间趋于无穷大的时候才能获得最佳控制效果。为提高系统的收敛速度,可在算法滑模面的设计中加入分数幂次项,这样可以做到系统状态变量的有限时间收敛。研究表明,有限时间收敛控制除了可以提高系统的收敛速度,还可使系统获得更好的抗扰动性能[10-13]。
伺服系统通常受摩擦力、测量噪声以及外部扰动等诸多不确定因素的影响,为了提高其跟踪控制精度,需要对系统的不确定性因素进行有效处理。目前,干扰观测器已被广泛应用于模型参数不确定性以及系统未知外部扰动的估计中[14-17]。只要能够精确估计出系统的扰动,那么其对系统控制精度的影响将得到有效的抑制[18]。文献[14]中,基于干扰观测器的自适应模糊跟踪策略被应用于一类多输入多输出非线性系统的控制器设计中,通过干扰观测器对复合扰动的估计可有效提高系统的控制精度。Liu[16]针对具有时变扰动及未知模型不确定性因素的水下航行器轨迹跟踪控制问题,提出了采用基于非线性干扰观测器的反步有限时间滑模控制方法,取得了不错的控制效果。
本文结合有限时间滑模和干扰观测器各自的优势,考虑存在系统不确定因素影响以及具有输入饱和约束的永磁同步电机伺服系统跟踪控制问题,提出了具有控制输入约束的鲁棒有限时间控制方法。首先,充分考虑外部未知扰动的影响,利用干扰观测器实现对系统不确定性因素的在线估计。然后,针对实际应用中执行机构饱和的问题,设计具有输入约束的鲁棒有限时间控制器。仿真结果表明,本文所提控制方法能够补偿系统不确定性对控制效果的影响,提高系统的鲁棒性能,同时消除执行机构饱和约束问题,有利于算法的工程应用。
1 永磁同步电机伺服系统问题描述
由文献[19],永磁同步电机伺服系统的机械动力学模型可以描述为
(1)

(2)
(2)式中:sign(·)为符号函数;vmax为控制输入的最大值。

(3)
假设饱和非线性函数S(u)可表示为
S(u)=u-sat(u)
(4)
则有sat(u)=u-S(u),将其代入(3)式可得
(5)
本文的控制目标为针对系统(5)存在的不确定性及控制输入饱和约束问题,基于干扰观测器设计抗饱和的鲁棒有限时间滑模控制器,实现永磁同步电机伺服系统跟踪误差有限时间收敛。
2 鲁棒有限时间控制器设计
2.1 干扰观测器设计
(6)

(7)
(7)式中,c1,c2,c3为待设计的观测器参数。
将(7)式减去(6)式,可得观测误差动态方程为
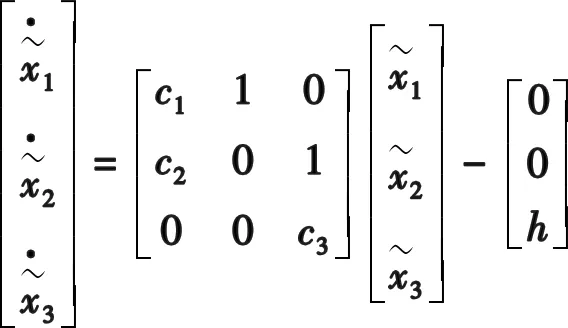
(8)
由(8)式可写出其特征方程为
p3-(c1+c3)p2+(c1c3-c2)p+c2c3=0
(9)
通过合理设计观测器增益矩阵参数c1,c2,c3使得观测误差特征方程式(9)是Hurwitz稳定的,从而可以保证观测误差的渐近收敛。
2.2 抗饱和有限时间滑模控制律设计
对于存在不确定性的系统(5),同时考虑控制输入约束的影响,下面结合干扰观测器和有限时间滑模进行控制律设计,具体设计过程如下。
首先,定义系统跟踪误差为
e=yd-y=yd-x1
(10)
(10)式中,yd为系统参考轨迹,满足连续二次可微条件,则e的一阶导数为
(11)
设计系统滑模面为
(12)
(12)式中:α,β>0为待设计的系统滑模面参数;sign(e)φ=|e|φsign(e);0<φ<1为待设计的正常数。
s的一阶导数为
(13)

(14)
(14)式中,ϖ为适当小的正常数。
则由(5)式、(7)式和(12)式,具有输入饱和约束的有限时间滑模控制律设计为
(15)
(15)式中,Δ可表示为
(16)
2.3 稳定性分析
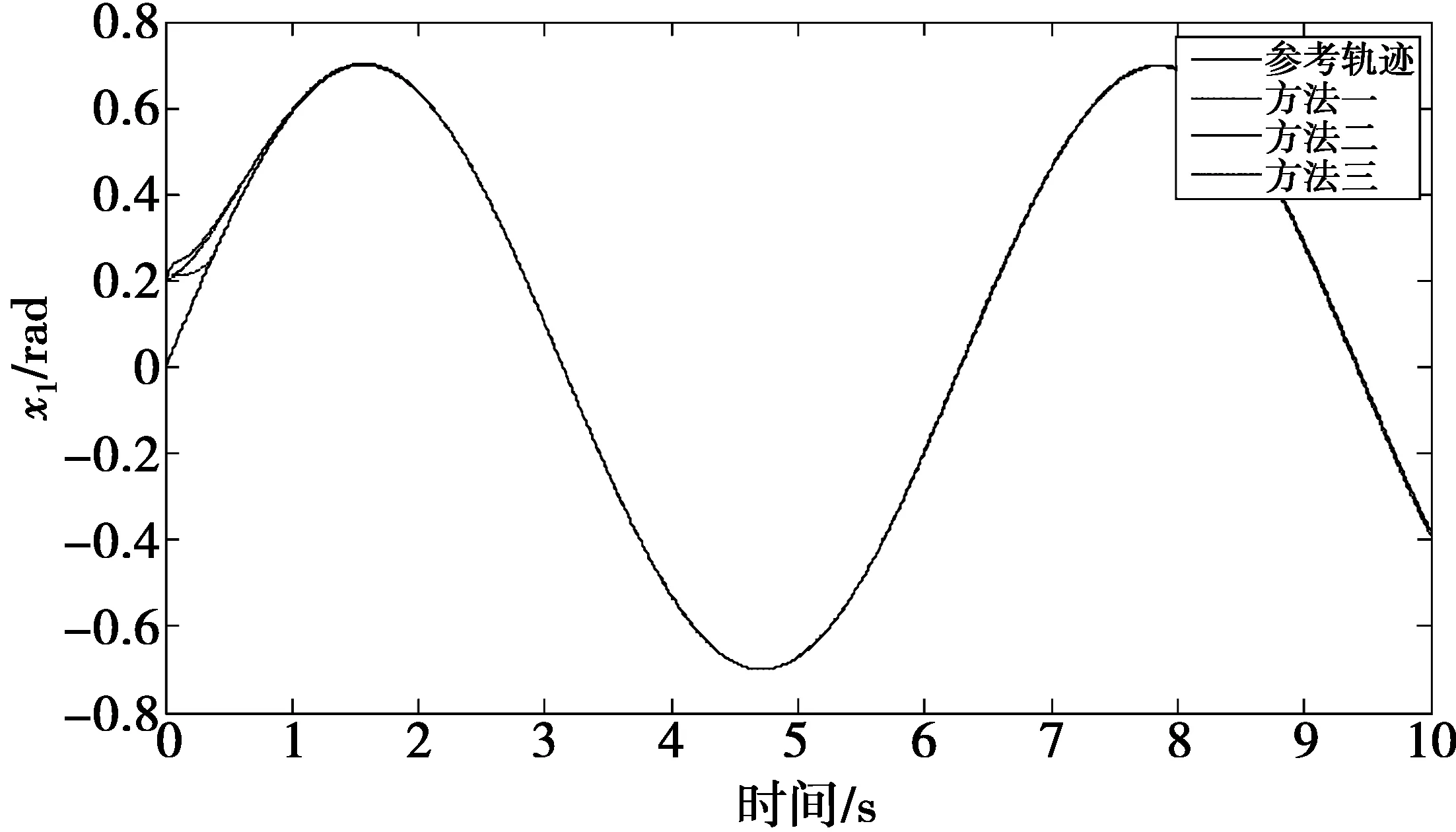
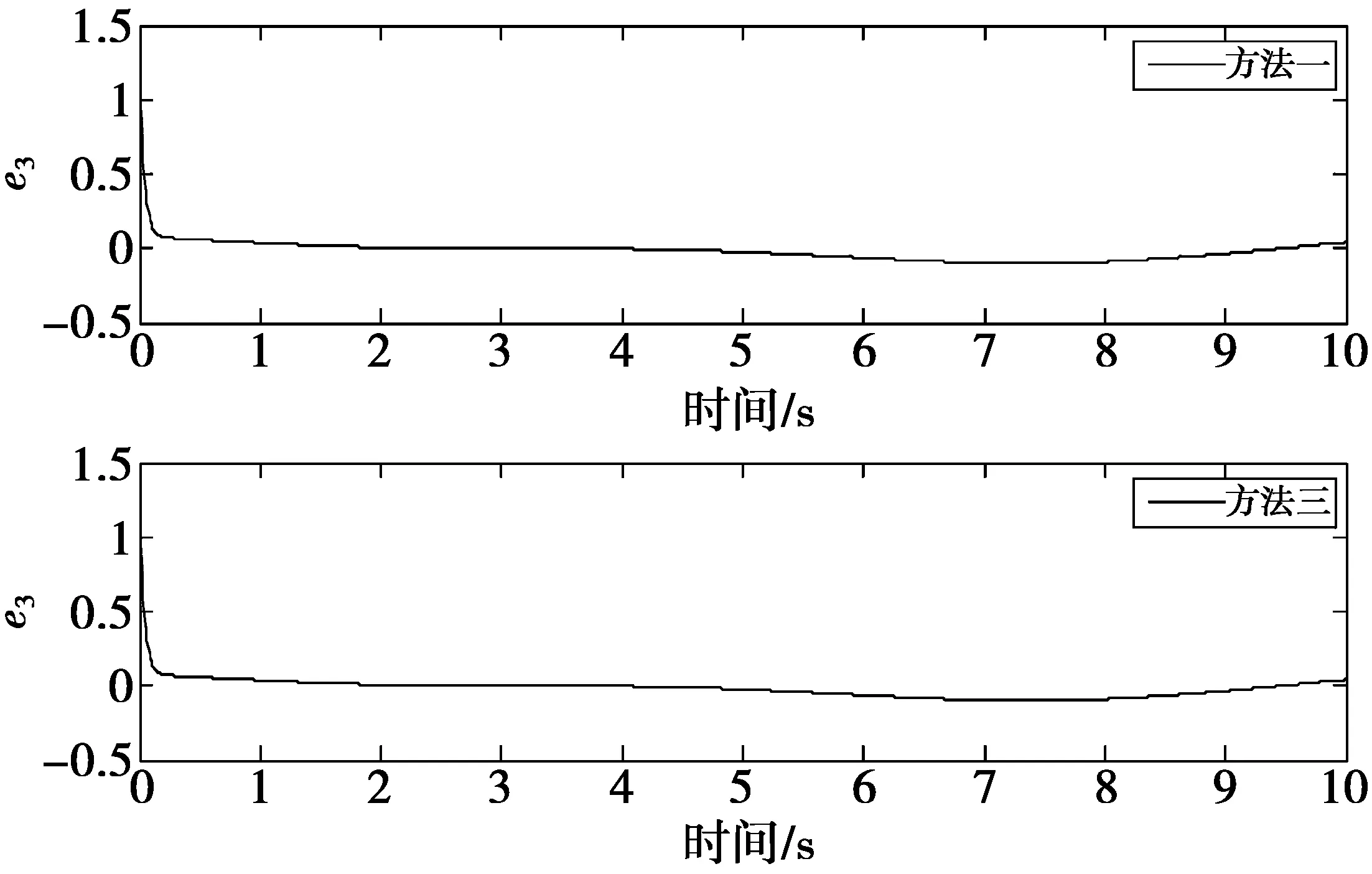
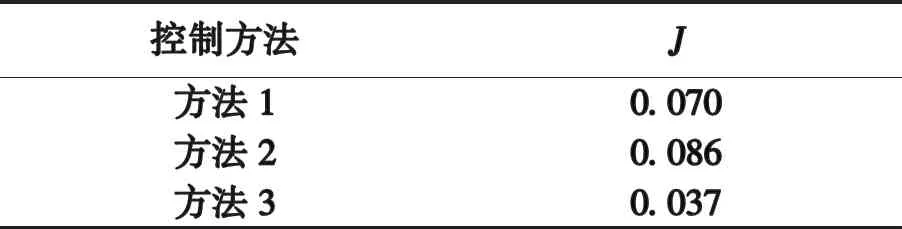
引理1[20]如果0 |b2|q+…+|bn|q (17) 成立。 引理2[21-22]假设存在一个连续正定的函数V(t),满足微分方程 (18) (18)式中,φ>0,0<μ<1是常数。则对应任意给定的t0,存在有限时间t1,使得(19)式成立。 V1-μ(t)≤V1-μ(t0)-φ(1-μ)(t-t0), t0≤t≤t1 (19) V(t)≡0,∀t≥t1 (20) 引理3[23]假设存在一个连续正定的函数V(t),满足微分方程 (21) (21)式中,实常数γ,l>0,0<η<1,则对于任意给定的t0,V(t)满足不等式 V1-η(t)≤[γV1-η(t0)+l]e-γ(1-η)(t-t0)-l, t0 (22) V(t)≡0,t>ts (23) (22)式中,ts满足 (24) 证明为了分析系统的稳定性,构建系统的候选Lyapunov函数为 (25) 对(25式)求导可得 (26) 将(15)式代入(26)式可得 (27) 因此,依据引理2,存在一个有限时间t1,当满足t>t1时,V1=0,从而在控制律(15)的作用下可以保证系统滑模面s在有限时间内收敛于零。 定理2当系统于有限时间内到达滑模面s后,跟踪误差将在有限时间内收敛到零。 证明一旦系统状态到达滑模面s=0,由(12)式可得 (28) 考虑候选Lyapunov函数 (29) 对(28)式求导,并将(27)式代入可得 (30) 因此,依据引理3可知,跟踪误差e将于有限时间内收敛到平衡点。 为了更好地验证控制器的有效性,本文分别对如下3种控制方法的控制效果进行仿真研究。 方法1不考虑控制输入约束但加入不确定因素补偿项的永磁同步电机伺服系统鲁棒有限时间控制算法。算法滑模面设计如(12)式,控制律设计为 (31) 方法2考虑控制输入约束但不加入不确定因素补偿项的永磁同步电机伺服系统鲁棒有限时间控制算法。算法滑模面设计如(12)式,控制律设计为 (32) 方法3考虑控制输入约束同时加入不确定因素补偿项的永磁同步电机伺服系统鲁棒有限时间控制算法。算法滑模面、控制律设计分别如(12)式和(14) 式。 假设系统不确定因素为 x3=4sin(0.5t)+cos(t)+0.5 (33) 为方便对比分析,仿真中永磁同步电机伺服系统的初始条件和控制器部分参数设置相同。系统的参考轨迹设定为yd=0.7sin(t);饱和限幅值为vmax=8 A;系统的初始位置设定为x(0)=0.1。 干扰观测器的参数设置为c1=20,c2=-600,c3=-26;控制律参数设置为α=3,β=0.2,φ=0.6,κ1=10,κ2=5。 3种控制方法的仿真效果如图1~图4。图1为3种方法的系统状态响应曲线;图2为3种方法的系统跟踪误差曲线;图3为干扰观测器对系统不确定性因素的观测误差;图4为3种方法的控制输入信号。由图1,图2可见,3种方法都在1.5 s后实现了对给定信号的稳定跟踪,但方法1和方法2的稳态响应时间较方法3要长,且方法1跟踪误差出现了明显的高频抖振,故总体而言,方法3具有更快的响应速度和更好的跟踪性能,且基本不受输入饱和约束和系统不确定性因素的影响。由图3可见,方法1和方法3中的干扰观测器均能有效地实现对系统不确定性因素的观测,即通过选择合适的干扰观测器相关参数,其观测误差可以控制在较小的范围内;由图4可见,方法1的控制输入信号在整个系统控制过程中,其值都超过了系统的饱和限幅值,尤其是在控制的初始阶段,由于存在较大的初始状态误差,控制输入信号幅值明显增加,极易导致系统执行机构控制输入饱和问题。而方法2和方法3由于采用了考虑控制输入饱和约束的鲁棒有限时间控制器,其控制输入信号的幅度可以很好地限定在系统执行机构饱和限幅值范围内,同时也能够达到较好的控制效果。 图1 3种方法的系统状态响应Fig.1 System state responses of three methods 图2 3种方法的系统跟踪误差Fig.2 Tracking errors of three methods 图3 系统观测误差Fig.3 Observation errors of the system 图4 3种方法的控制输入Fig.4 Control inputs of three methods表1 3种控制方法的控制效果比较Tab.1 Control effect comparison of three methods 控制方法J方法10.070方法20.086方法30.037 仿真对比结果表明,本文所设计的基于控制输入约束的永磁同步电机伺服系统鲁棒有限时间控制方法相比于其他2种控制方法具有更好的控制效果,该方法的跟踪精度高,能很好地消除系统输入饱和约束和不确定性因素的影响。 本文针对存在模型参数非线性不确定性因素和输入饱和约束的永磁同步电机伺服系统跟踪控制问题,设计了一种具有输入饱和约束的鲁棒有限时间控制方法,并用Lyapunov稳定性理论证明了闭环系统的全局有限时间稳定。仿真结果表明,所设计控制方法不仅具有调节时间短、鲁棒性强的控制效果,而且能够有效消除输入饱和约束对系统跟踪控制性能的不良影响。
3 仿真研究



4 结 论
