基于UM的高速磁浮车辆刚柔耦合建模及振动传递规律研究*
2019-11-11闫一凡齐洪峰罗林涛刘鹏飞张凯龙
闫一凡, 齐洪峰, 罗林涛, 刘鹏飞, 张凯龙
(1 中车工业研究院有限公司, 北京 100070;2 中车山东机车车辆有限公司, 济南 250000;3 石家庄铁道大学, 石家庄 050043)
从1971年第1辆磁浮车问世至今,磁浮轨道交通技术已历经50年的发展和革新,磁浮车辆从最初没有独立的走行部到模块化的磁轮走行结构再到今天采用独立的磁转向架走行部,大致经历了3个阶段的发展[1,2];同时研究磁浮车辆运行性能以及车-桥耦合振动的磁浮动力学仿真技术也有了更系统和更深入的发展,最初学者们将磁浮列车等效为移动力和移动质量块,研究了磁浮列车以不同速度通过桥梁时桥梁的动力学响应;随后将电磁力简化为弹簧力和阻尼力,研究了悬浮系统和桥梁的响应,找到了引起共振的车辆运行速度;最近学者们基于磁浮列车—桥梁,耦合系统的非线性模型,采用数值仿真方法,研究了共振速度下耦合系统的振动情况[4]。另外,在车-桥耦合振动方面也有两种研究方向:一种是侧重研究和优化控制原理和控制方法,以此寻找解决车—桥耦合振动的方法;另一种是基于简化的控制系统,将车辆线路考虑为多自由度刚—柔耦合系统,重点针对车辆和线路的相互作用,研究车辆系统结构参数对磁浮车轨相互作用的影响[3],文献[5-7]归纳了近年来针对磁浮列车动力学的代表性研究成果。需要注意的是,磁浮列车通过悬浮架弹性变形协调走行系统对线路的适应性,对磁浮列车的运行平稳性和安全性十分重要。
鉴于此,文中通过建立柔性悬架和刚柔耦合整车模型进行振动传递的仿真分析,并同多刚体整车模型的振动传递进行对比分析,旨在对比出两种建模方式对计算结果的影响,找出更接近工程实际的动力学建模方法。
1 刚柔耦合动力学模型建模
1.1 悬浮架柔性体建模
悬浮架是高速磁浮转向架的重要结构件,它不仅是安装电磁铁,二系悬挂系统等零部件的基础,也承担着牵引力、悬浮力、导向力以及车体载荷,而且悬浮架结构必须具有足够的柔性,以协调其上连接部件的相对运动,同时发挥一定的减振作用,保证高速通过曲线的性能。为了反映悬浮架的结构弹性,有必要对其进行柔性体建模。图1为悬浮架结构图,图2给出了柔性悬浮架通过CATIA、ANSYS和UM等软件进行建模的总体流程。
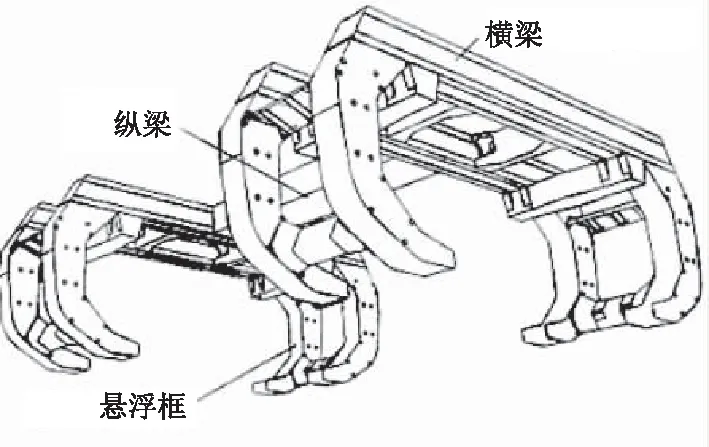
图1 悬浮架结构图
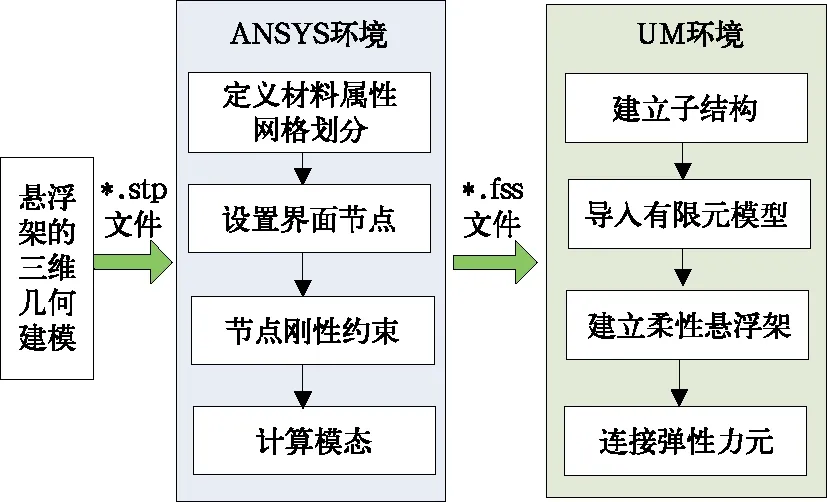
图2 柔性体悬浮架的建模流程
为更好的在动力学软件中模拟悬浮架的响应情况,按照图2的流程建立柔性体悬浮架模型并导入UM动力学软件:首先在三维建模软件中建立悬浮架的实体模型,存为ANSYS支持的格式,并导入ANSYS中进行网格划分,单元类型设置,界面节点设置,节点刚性约束,及模态计算等工作,然后输出fss格式的文件,并导入UM动力学软件的子模块中,建立柔性悬浮架模型。悬浮架的有限元模型如图3所示,所采用的单元类型为solid185四面体4节点单元,划分方法采用体映射网格划分,共产生单元56 936个,节点20 037个。
对该柔性体模型进行模态综合计算后得到前28阶自由振动模态,受限于篇幅,这里仅将100 Hz以内的振动频率和振型摘于表1中。柔性悬浮架的振动形式较为丰富,有限元模型的振型覆盖了第1阶到第28阶,频率从4.82 Hz到644.98 Hz,基本覆盖了车轨耦合振动的共振带频率范围,能够较好的反映工程实际的振动情况。

图3 悬浮架有限元模型

表1 100 Hz以内的柔性悬浮架模态
1.2 磁浮车辆整车动力学模型
从磁浮列车建模的角度看,磁浮列车由上部结构车体以及下部结构磁浮转向架组成,车体同转向架是通过摇臂、空气弹簧、吊杆以及牵引拉杆等二系悬挂零部件实现弹性连接,以满足车体和悬浮架间的相对运动关系。车体同转向架各部件间的拓扑关系如图4所示,图5为建立的整车动力学模型:
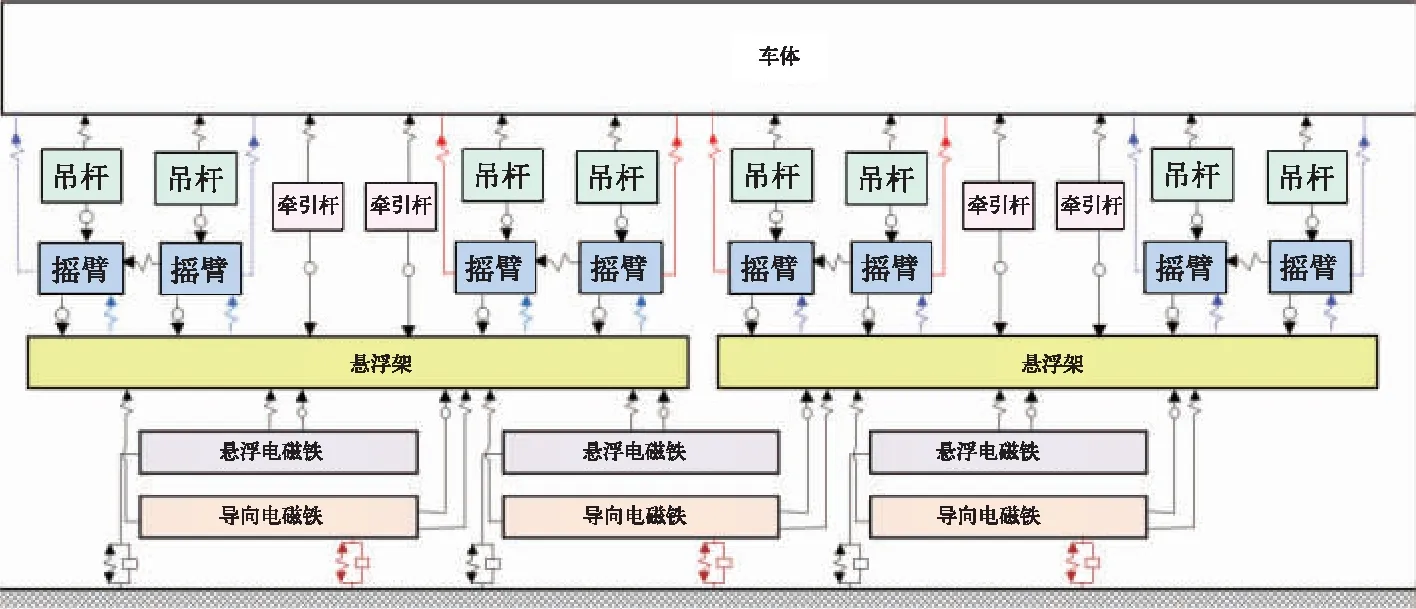
图4 车辆动力学模型拓扑图

图5 磁浮车辆动力学模型
在UM软件中悬浮架同各零部件的连接关系如下:悬浮电磁铁、导向电磁铁和摇臂均设置6个自由度,再通过设置铰接点处的力元以及力元6个方向的约束刚度实现其同悬浮架耦合;摆杆同摇臂形成铰接副,设为绕X轴转动;牵引杆一端同车体的牵引座连接,另一端同悬浮架形成铰接副;上部车体则通过16个摆杆和4套牵引杆同磁浮转向架铰接建模。
1.3 电磁力元的设置
磁轨相互作用关系是实现磁悬浮列车悬浮、导向的关键技术,为反映动态悬浮力和导向力,参考文献[5],采用较为成熟的单电磁铁悬浮模型来模拟悬浮电磁铁和导向电磁铁的悬浮力元,如图6所示,其电磁力的公式列于式(1)中,悬浮力对电流变化的函数曲线如图7所示。
(1)
式中F为单电磁铁的电磁力;μ为真空磁导率;N为线圈匝数;A为磁极面积;I为线圈中的电流;S为悬浮间隙。
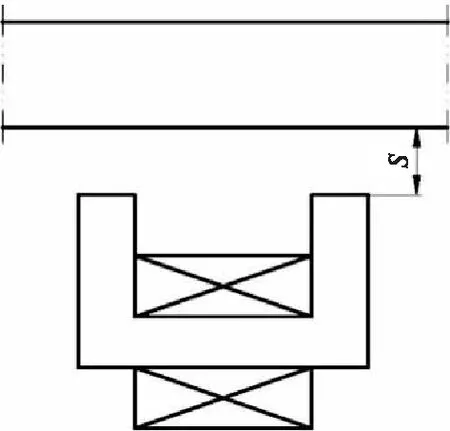
图6 单电磁铁悬浮模型
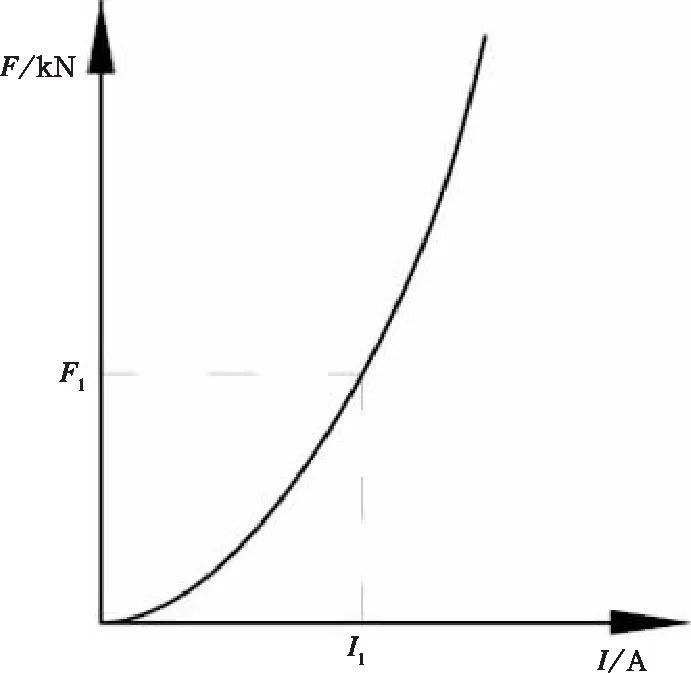
图7 悬浮力对电流变化的曲线
建模时我们在磁浮转向架模型中的每块悬浮电磁铁和导向电磁铁上均匀施加两个集中力以代替电磁力,同时在电磁铁上均匀布置两个间隙传感器以检测电磁铁同轨面的间距从而调整磁力大小,实现磁力控制。
2 悬浮架刚柔建模的振动响应比较
高速磁浮车辆在运行过程中会受到轨道不平顺的激扰,该激扰从轨道传递给转向架后会激发起车辆系统的随机振动。文献[10]根据上海高速磁浮列车运行情况,通过惯性基准法,测得磁悬浮线路的实际不平顺,并转换为标准的功率谱密度函数,通过傅里叶逆变换得到了时域的轨道不平顺如图8所示。分别采用柔性体悬浮架建模(简称:柔体)和刚性体悬浮架建模(简称:刚体),以400 km/h的速度运行工况来论述柔性体模型同刚性体模型对车辆系统随机振动传递的特点。
2.1 悬浮架刚柔建模对臂爪垂向振动的影响
图9给出了分别采用柔性悬浮架建模和刚性悬浮架建模得到的悬浮架臂爪处的垂向振动加速度时域图见图9(a)和频域图见图9(b),从时域图中可以看出两种建模方式得到的垂向加速度振动规律大体一致,但柔性体的振动峰值和谷值都在外边缘,也就是柔性体的振动更明显。频谱特性分析表明,频率大于4 Hz时,柔性体和刚性体垂向加速度的振动趋势大体一致,而频率小于4 Hz时,柔性体的频率波动更显著,成分也更丰富。同时在大于1 Hz时刚性体出现了振幅较大的尖点,而柔性体没出现较大振幅。在大于4 Hz时刚体模型同柔体模型的主频略有差别,刚性体的主频集中在7 Hz、50 Hz 和80 Hz左右,柔性体的主频集中在7 Hz和40 Hz 左右。
2.2 悬浮架刚柔建模对空气弹簧座垂向振动的影响
采用柔性悬浮架建模和刚性悬浮架建模时,得到的悬浮架空气弹簧座处垂向振动加速度的时频特性比较如图10所示。可以看出两种建模方法获得的垂向加速度振动趋势大体一致,比较图9(a)和图10(a)可知,刚体臂爪、空气弹簧座处振幅均多在±8左右,而柔体上对应两个位置的振幅分别在±8 m/s2和±5 m/s2间。由此表明,对刚体模型而言,垂向振动从臂爪传到空气弹簧座后没有衰减,而柔体模型的垂向振动从臂爪传到空气弹簧座后有一定的缓冲和衰减。在频谱特性图中(图10(b)),频率大于4 Hz时,柔性体和刚性体垂向加速度的振动趋于一致,而小于该频率时,柔性体有更丰富的频率波动。同时,刚体模型与柔体模型的主频略有差别,刚性体的主频集中在6 Hz、50 Hz和80 Hz左右,而柔性体的主频集中在6 Hz和45 Hz左右。

图8 高速磁悬浮轨道不平顺激扰
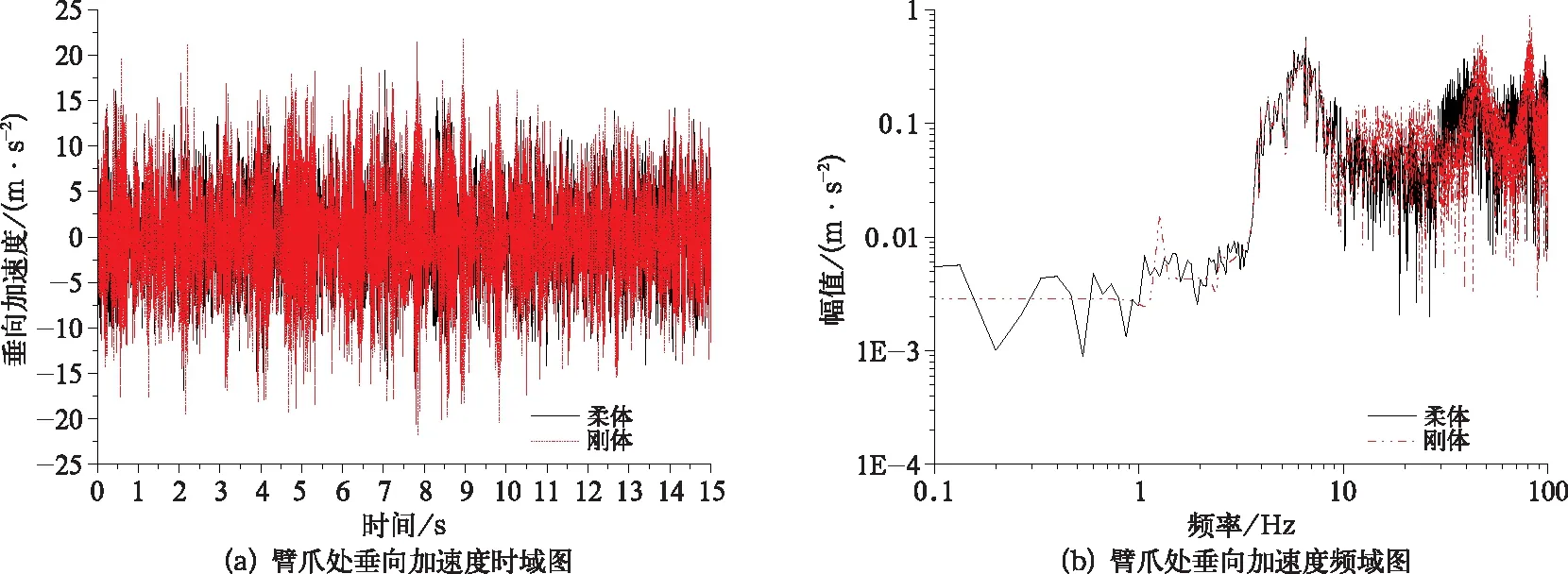
图9 臂爪处垂向加速度时域图和频域图

图10 空气弹簧座处垂向加速度时域图和频域图
2.3 悬浮架刚柔建模对车体垂向振动的影响
采用柔性悬浮架建模和刚性悬浮架建模时,得到的车体垂向振动加速度的时频特性比较如图11所示。从频域对比图中能够看出,相较于臂爪和弹簧座的垂向加速度而言,车体的垂向振动能量主要集中在低频区,而且幅值波动范围也要小很多,从空气弹簧座处振幅±5衰减到约±0.25之间,产生了数量级上的衰减,这说明空气弹簧对垂向振动的隔离效果较好。图11(b)频谱对比结果表明,在频率大于4 Hz时,两种建模方式下车体垂向振动差别不大,差异出现在小于4Hz的低频区,明显的采用刚体建模时,车体垂向加速度在1 Hz和3 Hz 左右出现了较大振动。此外,在频率大于4 Hz的区段,刚体振动出现了3次主频,分别在4.5 Hz,11 Hz和70 Hz左右,柔体则出现了2次主频,分别在4.5 Hz和35 Hz左右。

图11 车体垂向加速度时域和频域图
2.4 悬浮架刚柔建模对磁浮车辆系统垂向振动传递规律的影响
综合磁浮车辆各部分的垂向振动加速度数据,从频谱角度对比研究悬浮架刚、柔建模方式对磁浮车辆系统垂向振动传递规律的影响。
以臂爪、空气弹簧座及车体的垂向振动加速度频谱特性为对比指标,图12比较了采用刚性、柔性悬浮架建模时的频谱成分及对应幅值差异。从图12(a)可知,臂爪处和空气弹簧座处垂向加速度的频谱波形基本是重叠的,主频集中在7 Hz、50 Hz和80 Hz,而车体主频则在1 Hz、4.5 Hz、和11 Hz,说明垂向振动经空气弹簧衰减后,车体振动以低频为主,且车体垂向加速度的波动幅值比臂爪处和空气弹簧座处衰减了大约十多倍。在频率较低的1.5 Hz附近,车体的振动被放大,这是由于悬浮架振动激发起了车体的沉浮自振刚体模态。图12(b)对比结果表明,50 Hz以上的高频振动在柔性悬浮架中得到一定程度的抑制,主频集中在6 Hz和45 Hz 附近。总体来看,车体垂向加速度的波动幅值衰减较明显,特别在7 Hz以后,车体的振动得到有效隔离。
2.5 悬浮架刚柔建模对磁浮车辆系统横向振动加速度传递规律的影响
选取上面3个位置的横向振动加速度进行比较,图13分别给出了采用刚性、柔性悬浮架建模时悬浮架空气弹簧座处和车体处的横向振动加速度响应,可以看出,悬浮架柔性建模时,其横向振动加速度相对刚性模型的略大,而就车体振动而言,两种建模方式计算结果的差异不甚明显。
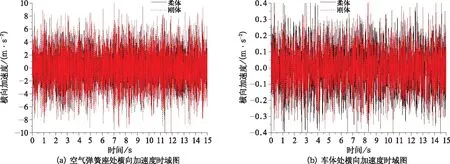
图13 悬浮架刚柔建模对空簧座和车体处横向加速度影响
下面从频域角度,对车辆系统横向振动传递特性进行比较:图14分别给出了采用刚性、柔性悬浮架建模时悬浮架臂爪处、空气弹簧座处和车体处的横向振动加速度频域图。由图14(a)可知,臂爪、空气弹簧座和车体处的横向加速度在1~5 Hz范围内幅值重叠较多,且都有2个明显波动,主频约为1.5 Hz和2.5 Hz,说明该频率范围内横向振动从臂爪传到空气弹簧座再经空气弹簧传到车体的过程中衰减不明显。特别在40~70 Hz 频段内,车体横向振动存在较大的振幅。与图12(a)中的结果相比,车体的横向加速度衰减幅度没有垂向加速度衰减明显,换言之,空气弹簧对系统横向隔振的作用有限。悬浮架柔体建模时见图14(b)所示,系统在0.1~5 Hz及20 Hz以后范围内波动相对明显,说明该频率范围内悬浮架臂爪弹性振动占主导地位。

图14 悬浮架刚柔建模对车辆横向振动传递的影响
综上所述,悬浮架的建模方式(刚性或柔性)不同一方面会影响悬浮架自身的振动形式,另一方面也会影响车辆系统振动的传递特性。相对刚性悬浮架而言,柔性悬浮架臂爪处和空气弹簧座处垂向、横向振动的差别较大,尤其是横向振动。两种建模方式对车体垂向振动计算结果的差异较小,但横向上,无论悬浮架采用何种方式建模,车体40~70 Hz频段内的横向振动均不能有效衰减,故建议在车体和转向架间增设横向减振器以更好的衰减横向振动,提高车辆舒适度。
3 结束语
基于UM动力学软件建立了采用柔性悬浮架的动力学模型和采用刚性悬浮架的动力学模型并以400 km/h的速度对两种模型的垂向振动传递规律及横向振动传递规律进行了计算分析,通过对比说明采用柔性构架不仅能反映构架自身丰富的振型,模拟其自身同外部结构的耦合振动,而且能较明显的区分悬浮架上部结构同下部结构不同的振动情况,能够使仿真计算结果更接近工程实际。
