民用微型无人机电磁兼容特性分析
2019-11-08董奇峰
王 粤,何 莹,董奇峰
(国家无线电监测中心检测中心,北京 100041)
民用微型无人机体积狭小,又要将动力、控制、导航、摄像等多种电子设备集于一身,这就造成了严重的电磁干扰问题。一方面无人机上诸多的电子设备势必对外发出电磁干扰,一方面外界又会对无人机本身施加干扰,使得无人机本身的电磁敏感性问题变得十分突出。
1 民用微型无人机介绍
无人机是无人驾驶航空器(Unmanned Aerial Vehicle)的简称,是一种利用无线电遥控装置和自备的程序控制装置实现飞行等功能的不载人飞机[1]。民用无人机一般由机身、飞行控制系统、导航系统、动力系统、数据传输系统及一些必要的任务系统组成。可按以下几种方式进行分类。
(1)按重量分类。微型无人机质量小于7kg,多用于个人拍摄、娱乐等功能,也是本文主要关注的无人机类型;轻型无人机质量介于7kg到116kg;小型无人机质量小于5,700kg;大型无人机质量大于5,700kg。
(2)按续航时间和航程。可分为长航时无人机、中程无人机、近程无人机和短程无人机。一般本文关注的民用微型无人机的续航时间为15-60分钟,航程受续航时间和操控距离所限,一般仅有数千米。
(3)按不同平台构型。固定翼无人机、单旋翼无人机(直升机)、多旋翼无人机,是无人机常见的几种平台构型;民用微型无人机最主要的平台构型是多旋翼(多轴)无人机,多采用4轴、6轴、8轴、甚至12轴旋翼的构型,最突出的测点就是成本低、操纵简单、悬停飞行稳定、便于进行拍摄、监控等功能。
(4)按不同使用领域。可分为军用、民用专业级和民用消费级3大类[2]。军用无人机是发展最早的无人机,并且由于军用无人机应用的复杂环境,军用无人机的各项技术指标也是十分高的,主要用于侦察、攻击、靶机等功能;民用专业级无人机相对于军用无人机各项技术指标要求较低,但是相对来说也具有可观的续航、航程和载荷能力,主要是各类政府机构、专业遥测单位在使用,用于救灾、遥感、农保等领域;民用消费级无人机,用于航拍、娱乐等用途,多选用多旋翼平台,体积较小,本文研究的民用微型无人机基本属于此类。
2 民用无人机监管体系与现状
大量涌现的民用微型无人机,给我国空中、地面安全造成了一定威胁。近几年,在北京、成都、重庆等地多个机场都出现了无人机进入民航禁飞空域的事件,累计造成数百架次航班延误起飞、多架次航班空中避让。同样,不法分子私自放飞无人机,进行偷拍等活动,侵犯了公民的隐私权;如果拍摄的是重要的军事敏感设施,还会严重危害到国家安全。再者,即便是体积重量较小的民用微型无人机,当无人机因自身可靠性,或是受到外界干扰,造成失控坠机时,从空中坠落的动能以及高速旋转的旋翼,依然会伤害到地面的人员。
民用微型无人机既是一种航空器,受中国民用航空管理局管理,又是一种搭载各类无线电通信设备的电子设备,受工业和信息化部管理。在民航方面、中国民用航空管理局发布了《民用无人机空中交通管理办法》、《关于民用无人机管理有关问题的暂行规定》、《民用无人驾驶航空器系统驾驶员管理暂行规定》、《轻小无人机运行规定(试行)》等主要针对民用无人机适航方面的规定[3],但其中对微型无人机不做强制要求。作为电子设备,民用微型无人机仅因其搭载的无线电设备受工业和信息化部无线电管理局管理,在民用微型无人机的生产、销售、监管方面就再无有效的规章制度。由于民用微型无人机技术门槛低,大量企业涌入民用微型无人机的市场当中。据统计,目前国内约有400多家民用无人机生产单位,初步估计已生产了逾百万架无人机,其中微型无人机占据了绝大多数。在各种渠道都可以方便的购买上述企业生产的各种类型的民用微型无人机,并且对这些渠道政府往往没有有效的监管。综上,我国并没有建立起有效的应用于无人机的管理制度。
我国在无人机领域开展相关的研发工作已有40多年。在无人机总体设计、飞行控制、导航、遥测、图像传输、抗干扰、任务设备等多个技术领域发展很快。但是我国在无人机领域的标准化工作却起步较晚,发展缓慢。目前,我国在无人机领域还没有形成完整的标准体系,已颁布实施的有关无人机的标准有GJB2347-1995《无人机通用规范》、GJB3060-1997《无人机电气系统通用规范》、GJB5433-2005《无人机系统通用要求》等[4]。这些标准以通用要求为主,在无人机涉及的各个专业方面,并不是特别的全面,更没有针对电磁兼容方面的专门标准。
从国内外无人机标准领域现状来看,一方面现有标准多从军用的需求出发的,缺乏专门应用于民用无人机的标准,一方面,这些标准主要是通用标准,缺乏无人机专用的电磁兼容标准。因此,国内对于无人机,特别是民用无人机的电磁兼容性要求和测试方法尚处于空白状态。
3 民用微型无人机电磁兼容特性分析
3.1 民用微型无人机电磁兼容特点
无人机因其用途不同、所处的环境,所面对的电磁干扰是完全不同的,只有对这些电磁干扰进行分析和确定,才能更好地分析无人机的电磁兼容性要求。
电磁环境是指“存在于给定场所的所有电磁现象的总和”,给定场所指的是空间,而电磁现象包括了全部时间与频谱,所以电磁环境的三个要素是时间、空间和频谱。无人机所受到的电磁干扰源可分为无人机内部的的电磁干扰和无人机外部的的电磁干扰。图1为无人机面对的主要干扰源。

图1 无人机主要干扰源的示意图
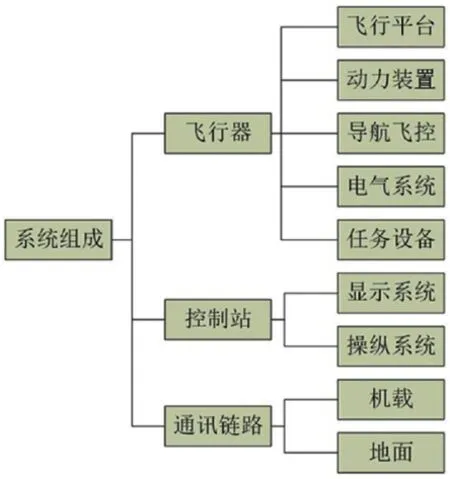
图2 民用无人机系统构成
3.2 民用微型无人机内部电磁兼容分析
由于无人机自身的特点的,无人机在设计时非常注意控制自身的体积和重量,而对于民用微型无人机而言,这种情况就更为突出。这就造成了无人机的内部空间十分有限,又要在这有限的空间内集成诸如动力装置、电子装置、导航、控制的等一系列的设备。同时民用微型无人机集成了遥控、图像传输、定位等多种无线电收发设备,各种设备之间的无线电频率从数千赫兹到数吉赫兹,电磁频谱占用宽,设备间的电平相差大。机身大小有限,还造成了机内电缆布设困难,天线位置大小也有限,无法有效的进行电路设计以减小干扰。另外,民用微型无人机为了减小重量,对机内设备的屏蔽不足,使得机内电子设备直接暴露在电磁干扰源的辐射下。
研究无人机内部的电磁兼容性,需要分析无人机自身内含的各种电磁干扰源、耦合传播途径、敏感端口等,只有这样才能为无人机电磁兼容性测试提供有效依据。图2给出了民用无人机的系统构成示意图,可以看出,无人机的动力装置、电气系统、任务设备、机载通信链路等,是无人机内电磁环境的主要干扰源。此外,如果无人机内部电路布局不合理,接地屏蔽措施不完善,就会在无人机局部积累大量的电荷,造成无人机内部产生静电噪声。
无人机内部相对恶劣的电磁环境,加之由于机体空间狭小,以及民用微型无人机为追求轻便小巧,故机体采用透波的塑料、碳纤维材料结构,甚至采用开放结构,使得飞机系统内的电磁环境也变得十分复杂[5]。在分析无人机内部的电磁兼容性时,可以考虑考虑天线、线缆、以及公共阻抗传导等几类耦合方式。
无人机电磁兼容性的另外一个方面是是无人机内部的电磁敏感设备对电磁环境的适应能力,包括导航飞控、电气系统、控制装置、通讯装置以及一些任务设备(如:摄像头等)。这些设备的抗扰度会影响到无人机的正常工作、甚至飞行安全。对于这些设备可能遭受的电磁干扰应该展开分析。
3.2.1 动力系统的电磁干扰
无人机的动力系统包括发动机以及相关的辅助设备,目前主流的民用无人机通常采用为活塞式发动机和电动机作为动力系统。活塞发动机主要用在大中型无人机上,小、微型无人机中普遍使用的是电动动力系统,电动系统主要由动力电机、动力电源、调速系统三部分组成。电动系统的成本低廉,控制方案成熟有效。图3为民用无人机常见的电动系统组成,包括电动机(马达)、电子调速器、控制器以及动力源(一般是电池)。

图3 民用微型无人机电动系统组成
动力电机则主要采用直流无刷电机,电机基于电磁感应原理工作。电机在运行时,流过电机的电流中具有很多的高频电磁成分,这些高频成分的电磁能量会以电磁波的形式向周围空间辐射,从而对周围的敏感设备造成辐射电磁干扰;与此同时,电机产生的电磁能量还有可能由于共阻抗耦合或电感耦合而传导至与电机相连的部件或设备,使其受到传导电磁干扰,影响系统其他部件的正常工作[6]。
而电子调速器则采用脉冲宽度调制(PWM)方式,这种方式能使电源的输出电压在工作条件变化时保持恒定。脉冲宽度调制(PWM)的原理就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。逆变电路的核心器件是IGBT(绝缘栅双极型晶体管),IGBT工作时开关管瞬时高速通断使得发射极和集电极之间形成一个电压高低电平高速的转换,产生一个较大的瞬时电流以及瞬时电压[7]。这种瞬时电流和电压是造成电磁干扰的主要原因。
3.2.2 电气系统的电磁干扰
无人机电气系统可分为机载电气系统和地面供电系统两部分。机载电气系统主要由主电源、电气设备的控制与保护装置及辅助设备组成。电气系统一般包括电源、配电系统、用电设备3个部分。供电系统的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。对民用微型无人机而言,主要采用电池供电,电磁干扰主要由于供电系统中电势不平衡产生的。
3.2.3 任务设备的电磁干扰
无人机根据使用用途的不同,可以搭载不同设备进行工作。常用的无人机任务设备有:航拍相机、测绘雷达、气象探测装置、农药喷洒设备、测距仪器等。对民用微型无人机而言主要任务设备是摄像头,而摄像头为了正常工作,需要使用时钟信号同步图像扫面信号。主时钟(MCLK)、像素时钟(PCLK)的基频和谐波信号如果屏蔽不当就可能会造成电磁干扰。
3.2.4 机载通信链路的电磁干扰
无人机通信链路主要用于无人机系统传输控制、载荷通信的无线电链路。工业和信息化部关于无人驾驶航空器系统频率使用事宜的通知规定840.5-845MHz、1430-1444MHz和2408-2440MHz频段用于无人驾驶航空器系统,不过由于对许多民用微型无人机定位不明,监管缺失,以及机载设备的任务需要,在无人机具体应用中还往往使用了其他频率。这就难免与目前使用这些设备的之间产生相互干扰。并且,现在的民用微型无人机强调较远的控制距离和数据传输距离,在技术水平有限的情况下,难免采取增大辐射功率等方式,造成辐射场强和辐射杂散过大,通过天线,外壳辐射到外部造成干扰。表1为无人机机载设备常用频率,以及这些频率在其他领域的应用。
3.3 民用微型无人机外部电磁兼容分析
无人机外部的电磁环境包括大自然的电磁环境和人为电磁环境[5]。自然的电磁环境主要有地磁影响、宇宙射线噪声等。而人为的电磁环境则是主要是人们的自身活动,以及使用了无线电发射设备所产生的有意辐射和伴随而来无意辐射。

表1 无人机机载设备常用频率
图4是欧洲电信标准化协会(ETSI)技术报告ETR 273-1-1总结的电磁噪声源和近似电平。可以看到,由大气噪声、宇宙辐射等构成的自然电磁环境要比人为电磁环境干扰相对小很多[5]。不过辐射的强度受到了高度的影响,虽然我们认为自然辐射很小,但是自然辐射确是高空中的主要干扰源,对飞行高度非常高的喷气式飞机影响较大;而在近地区域就是人为造成的电磁感干扰成为主要影响因素,影响的正是飞行在低空高度数百米以内民用微型无人机。低空工作的民用微型无人机,可以说电磁环境“十分恶劣”。图5给出了一个外部电磁环境示意图。辐射源包括卫星信号、广播电视信号、汽车产生的信号、移动电话信号、家用电器、家用电子产品,甚至还有供电网的电磁辐射。
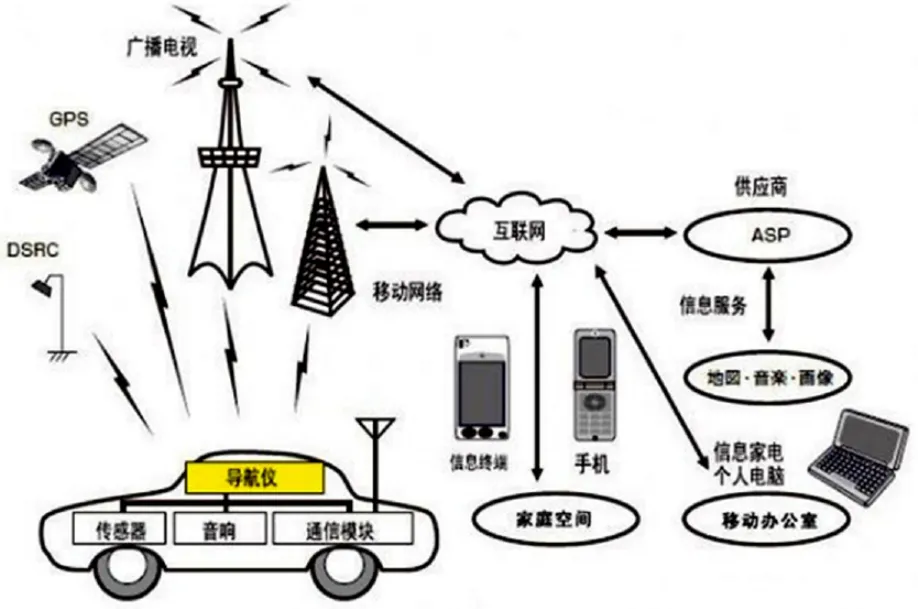
图5 外部电磁环境示意图
无人机外部的电磁环境对无人机产生的影响不仅取决于外界电磁环境的强弱,而且与无人机的结构、系统布局以及工作方式有着密切的关系[5]。如果无人机使用了金属外壳,由于金属外壳本身具有屏蔽性能,那么无人机对外部的辐射就与有了一定的抗干扰能力。而且金属机壳还可以避免电荷的积累,大大降低产生产生静电干扰的概率。这种情况下就要关注干扰源耦合在机身开口、缝隙上所引起的干扰。而如果无人机用了塑料机身甚至没有外壳,那么机内的敏感设备就完全没有屏蔽,这种情况下主要考虑外界的辐射干扰。
4 民用微型无人机电磁兼容测试方案
IEC61000-4系列标准给出了电气电子产品设备在没有产品类标准时可以参考的要求。该系列标准规定了以下端口作为设备与外界电磁环境特定界面。
外壳端口:设备的物理边界,电磁场可以通过他来向外辐射或侵入。
电信/网络端口:连接声音数据和信号传递的端口。
电源端口:为设备或相关设备提供电源而使其正常工作的导线或电缆的端口。
这些端口是电磁干扰最有可能的耦合途径,如图6所示。
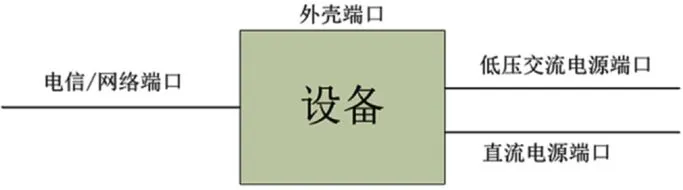
图6 设备端口
结合对民用微型无人机的电磁兼容特点分析,总结了民用微型无人机适用的电磁兼容测试项目包括骚扰测量项目(表2)和抗扰度测量项目(表3)两部分:

表2 骚扰测量项目
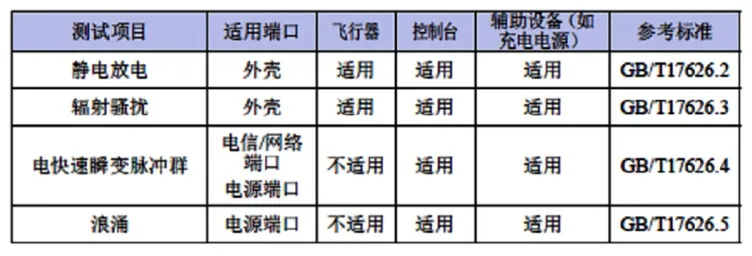
表3 抗扰度试验项目
5 结束语
本文针对民用微型无人机的电磁兼容特点,分析了民用微型无人机内部、外部的电磁环境,依据现有民用电磁兼容体系,总结出适用于民用微型无人机的电磁兼容测试方案,为民用微型无人机电磁兼容检测标准的制定进行技术铺垫。
加强对民用微型无人机的管理,使其能够更好的服务大众,同时确保安全,应是政府相关主管部门未来工作的重要方面。一方面,应该加速制定民用微型无人机的管理文件;另一方面应该构建作为管理文件相应支撑的标准体系。应大力开展标准制定,构建以国家标准、行业标准为主体的民用无人机标准体系,通过标准提升无人机技术水平,规范技术状态,并支撑无人机法律法规的制定和完善。
