基于多尺度特征向量的输电线路无人机LiDAR点云数据分类方法
2019-11-07付红安夏峻马海鹏田帅王学平
付红安,夏峻,马海鹏,田帅,王学平
基于多尺度特征向量的输电线路无人机LiDAR点云数据分类方法
付红安,夏峻,马海鹏,田帅,王学平
宁夏宁电电力设计有限公司, 宁夏 银川 750000
提出了一种基于多尺度特征向量的输电线路无人机LiDAR点云数据分类方法,可以有效对线路走廊中的地物进行分类。首先提取三维点云数据的多尺度局部特征作为特征参数构成特征向量,主要包括高程特征、连通特征、张量特征和平面特征。然后将多尺度特征向量输入到多分类相关向量机分类器中,在完成分类器训练之后,对无人机LiDAR点云数据进行分类。试验结果表明,该方法可以有效区分地面、植物、建筑物、杆塔和电力线5类线路走廊地物LiDAR点云数据,分类整体精度达到96.63%。
输电线路; 无人机; 云数据分类
随着无人机技术和激光雷达扫描(Light Detection And Ranging,LiDAR)技术的不断发展,及输电线路无人机巡检和三维建模研究的不断深入,机载LiDAR技术可以有效解决传统人工巡检的缺点,减少输电线路故障的发生[2]。在无人机LiDAR输电线路巡检中,线路走廊模型三维重建是重点研究问题,是线路三维可视化、通道清理、故障预测等应用的基础[3]。其中,无人机LiDAR点云数据分类是线路三维重建研究的核心,直接决定了重建模型的准确性[4]。目前,无人机LiDAR点云数据分类主要有三类方法,主要包括地物典型几何特征分析法、决策树分析法和机器学习法三类。其中,地物典型几何特征分析法只能对符合典型特征的地物进行分类,易受地形影响,且分类后的数据会部分缺失[5];决策树分析法分类精度较高,效率高,但识别地物种类有限[6]。因此,将地物点云多尺度特征进行融合,采用机器学习的方法进行监督分类成为了研究重点。本文提出了一种基于多尺度特征向量的输电线路无人机LiDAR点云数据分类方法。首先提取三维点云数据的多尺度局部特征作为特征参数构成特征向量,然后采用多分类相关向量机(Milticlass Relevance Vector Machine,M-RVM)分类器对无人机LiDAR点云数据进行分类,可以分为地面、植物、建筑物、杆塔和电力线5类,总体分类准确率达到96.63%。
1 特征提取
由于输电线路走廊地形多变且环境复杂,所以无人机LiDAR点云数据信息量大且分类目标多样,包括地面、建筑物、植物、电力线和杆塔。因此提取的点云数据特征值需要更加精细和准确,从而可以有效对每一类分类目标进行有效分类。由于特征值提取需要与其三维邻域内的其他点云进行分析计算,因此进行定义特征值时需要结合领域的形状和大小考虑。
根据线路走廊中地物的LiDAR点云数据特征与文献[7]中的结论,本文定义了以下三种点云领域的划分方式:(1)以待分类点为中心的球体邻域V;(2)对整个数据集采用纵向二维格网划分的格网领域2D;(3)对整个数据集采用三维格网划分的格网领域3D。
其中,张量特征和平面特征基于V计算得出,高程特征和平面连通性特征基于2D计算得出,高程连通性特征基于3D计算得出。同时,本文从以下四个方面定义了16个特征参数来描述无人机LiDAR点云的局部特征。根据文献[8]的研究结果和减少计算量,本文仅利用点云空间几何信息来定义特征参数,未采用回波信息。
1.1 高程特征
根据式(1)~(3)可以计算出特征值:平面密度1、二维体密度2和三维体密度3。


式中,LiDAR点云点在2D和3D内的总数量为2D和3D,二维格网的平面面积和体积分别为2D和2D,三维格网的体积面积为3D。植物和电力杆塔的点云数据所在的2D内平面密度较大,电力线的点云数据所在的2D内体密度较小。
根据式(4)~(6)可以计算出特征值:最大高差4、高程方差5和高程平均值6。
式中,P为点云数据在二维格网中某个点的高程,P、P和P分别为点云数据在二维格网中间、最高和最低位置的高程。对于电力线和杆塔所在的二维格网,最大高差4较大;对于地面所在的二维格网,其高程平均值6较小。
1.2 连通特征
根据式(7)~(9)可以计算出特征值:高程连通性7、平面连通性8。



式中,PN为点云数据在相邻二维格网中最高位置的高程。高程连通性7、平面连通性8可以用来区分电力线和杆塔点云数据。
1.3 张量特征
点云数据领域协方差矩阵的特征值可以描述局部张量特征。设为点云点P的领域协方差矩阵,可以由式(10)和式(11)计算得出。


对进行特征值分解计算,选取特征值1、2和3,根据式(12)~(15)计算获得张量特征,包括点云点在3D内所有点的各向异性9、平面分布特性10、球面分布特性11和线状分布特性12。




9和10在非平面处较低,在平面处较高;11非平面处较高,在平面处较低;12在线性结构处较高。
1.4 平面特征
根据文献[8]中的结论,设该三维领域3D内中点的法向量角度为13;所在3D内所有点法向量角度方差为14,所有点到其拟合平面距离的残差为15,所有点拟合的平面距离为16。所计算的局部领域平面特征可以有效的对建筑物和植物的点云数据进行分类。
根据上述计算获得特征值,可以构建特征向量=[1,2,…,16],且该特征向量的计算与领域尺度的大小相关,会直接影响到最终的地物点云数据分类准确性。当较小时会导致局部特征不明显,当较大时会导致地物分类准确度降低。本文采用多尺度领域计算特征值,从而达到更好的区分度和稳定性。领域尺度取值如表1所示。

表1 领域尺度k取值
因此,可以构建最终的LiDAR点云数据多尺度分类特征向量=[f1,f2,f3]。
2 多分类相关向量机
由于输电线路无人机LiDAR点云数据的训练样本量较小,且在实际应用中需要较快的计算速度,因此本文提出采用M-RVM对输电线路无人机LiDAR点云数据进行分类[9]。M-RVM采用0-1向量的形式对点云数据的类别进行表示,如果需要分类的点云数据有种,则采用维的0-1列向量的形式进行表示。输电线路走廊无人机LiDAR点云数据在本文被分为地面、建筑物、植物、电力线和杆塔5种,则采用5维列向量(0,0,0,0,1)T、(0,0,0,1,0)T、(0,0,1,0,0)T、(0,1,0,0,0)T和(1,0,0,0,0)T作为类别标签。M-RVM具体算法流程见文献[9]。
3 试验验证
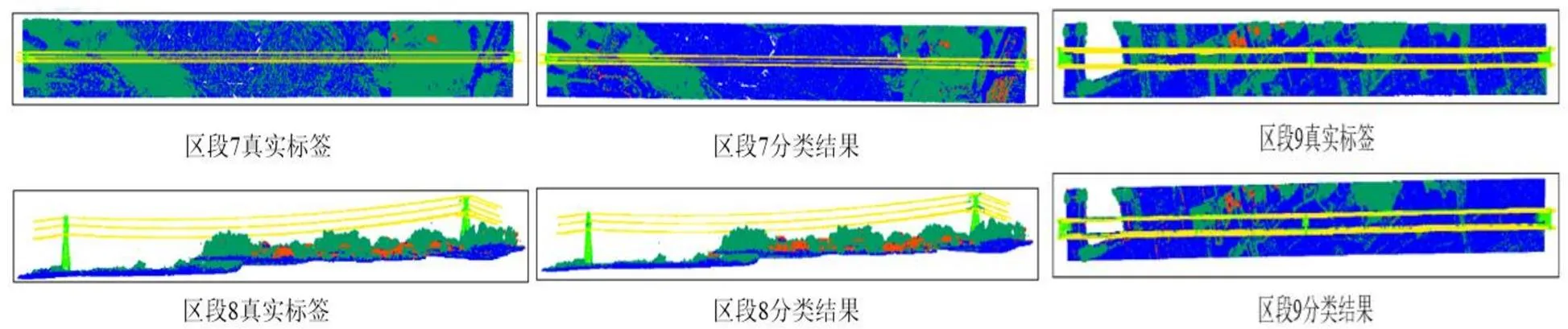
图1 分类结果与真实标签的对比
为验证本文提出算法的有效性,采用贵州省某条输电线路走廊的无人机LiDAR点云数据进行试验。该条输电线路走廊长度约10 km,宽度约40 m,包括10基杆塔和2回线路,地物主要包括植物和建筑物。点云数据总点数约为2×106个,平均点间距约为0.5 m。试验环境采用Inetel i5-7200U四核处理器,2.7 GHz主频,8 GB内存的计算机。由于训练分类器需要综合考虑各类地物信息,本文将10基杆塔之间的9个走廊区段的前6个(区段1~区段6)选为训练集,后3个(区段7~区段9)选为测试集。为对本文方法的分类结果进行评价,所有的点云数据均需要人工进行标记类别标签。分类结果如图1和表2所示。试验结果表明,该方法可以有效区分地面、植物、建筑物、杆塔和电力线5类线路走廊地物LiDAR点云数据,分类整体精度达到96.63%。

表2 分类准确度
4 结论
基于高程特征、连通特征、张量特征和平面特征,本文通过定义不同的点云领域划分方式和领域尺度,构建的无人机LiDAR点云数据多尺度分类特征向量可以有效用于输电线路走廊地物的分类计算。本文提出的基于多尺度分类特征向量的输电线路无人机LiDAR点云数据分类方法可以有效对地面、植物、建筑物、杆塔和电力线5种地物进行分类,分类总体精度达到96.63%,分类结果可以用于输电线路走廊三维建模。
[1] 杨渊,陈凤翔,虢韬,等.基于LiDAR点云特征和模型拟合的高压线提取[J].中国科学院大学学报,2018,35(5):612-616
[2] 沈小军,杜勇,王仁德,等.基于地面激光雷达的输电线路铁塔倾斜度测量[J].电子测量与仪器学报,2017,31(4):516-521
[3] Guo B, LI QQ, Huang XF,. An Improved Method for Power-Line Reconstruction from Point Cloud Data[J]. Remote Sensing, 2016,8(1):36
[4] Kim HB, Sohn G. Point-based Classification of Power Line Corridor Scene Using Random Forests[J]. Photogrammetric Engineering & Remote Sensing, 2013,79(9):821-833
[5] 彭向阳,陈驰,徐晓刚,等.基于无人机激光扫描的输电通道安全距离诊断技术[J].电网技术,2014,38(11):3254-3259
[6] 陈鑫松,袁晓妍,李响.综合单点和点簇的建筑物点云分类方法[J].测绘与空间地理信息,2018,41(6):91-93
[7] Guo B, Huang XF, Zhang F,. Classification of airborne laser scanning data using JointBoost[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015,100:71-83
[8] Jie S, Zulong L. Airborne LiDAR Feature Selection for Urban Classification Using Random Forests[J]. Geomatics and Information Science of Wuhan University, 2014,38(11):207--212
[9] 尹金良,朱永利,俞国勤.基于多分类相关向量机的变压器故障诊断新方法[J].电力系统保护与控制,2013,41(5):77-82
LiDAR Point Cloud Data Classification Method for Transmission Line UAV Based on Multi-scale Feature Vector
FU Hong-an, XIA Jun, MA Hai-peng, TIAN Shuai, WANG Xue-ping
750000,
A LiDAR point cloud data classification method for transmission line UAV based on multi-scale classification features is proposed, which can effectively classify the grounding objects in the corridor of transmission line. Firstly, multi-scale local features of 3D point cloud data are extracted as feature parameters to form feature vectors, which include height features, connectivity feature, tensor feature and plane feature. After that, the feature vector is inputted into the classifier of multi-classification correlation vector machine. After the classifier training is completed, the LiDAR point cloud data of UAV is classified. The test results show that this method can effectively distinguish 5 kinds LiDAR point cloud data of line corridor, which includes ground, plants, buildings, towers and power lines. The classified overall accuracy reached 96.63%.
Transmission line; UAV; cloud data classification
TM769
A
1000-2324(2019)05-0852-03
10.3969/j.issn.1000-2324.2019.05.025
2018-07-21
2018-09-01
付红安(1990-),男,硕士研究生,工程师,主要研究方向为输电线路设计及新技术. E-mail:yishilfxy@163.com
