基于视频监控的地面原煤运输集控系统设计
2019-11-06刘伟
刘 伟
(太原理工大学 电气与动力工程学院,太原 030024)
地面原煤运输集控系统的可靠性关系着煤矿生产是否安全可靠的重大问题,在煤矿生产领域已受到越来越多的关注。某煤炭企业的地面原煤胶带运输系统由1号皮带、1号筛、中粒度带、中粒度仓、2号皮带、2号筛、粒度带、粒度仓、转角带、仓带和原煤仓等组成,可概括为由 6 条胶带输送机、3个煤仓、2个振动筛以及控制设备等组成,其运输系统见图1。
由于该地面原煤运输系统采用单个设备对胶带机及振动筛进行简单人工手动操作,只有简单的单个控制设备保护,没有构成一个整体的系统,导致原煤运输系统经常发生故障影响安全生产,为了保障设备长时间可靠运行,本文设计以PLC为控制核心的地面原煤输送系统,并采用视频监控的方式加强地面原煤运输系统的监控水平,实现远距离集中控制和监控相结合,提高地面原煤运输系统的自动化水平[1]。
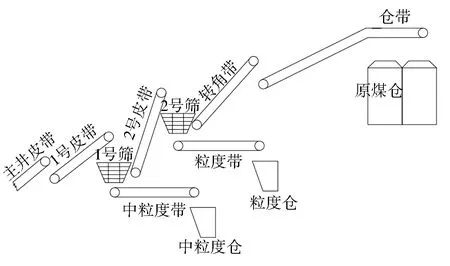
图1 地面原煤运输系统示意图Fig.1 Raw coal transportation system
1 控制系统要求
胶带集控系统要求对仓带、转角带、粒度带、2#筛、2#皮带、中粒度带、1#筛和1#带进行集中控制并给主带留一个状态控制信号。每台设备采集四个状态(起动、停止、运行、故障)。给每部胶带机配置拉线开关,用以实现设备的现场紧急停车。配置有跑偏、煤位、烟雾、撕裂等保护功能,构成较完善的监控系统。
视频监控系统要求由摄像、传输、控制、显示和记录五大部分组成,实现实时监视、实时录像、录像回放。视频监视系统采用优质一体化工业摄像机。视频设备应选择具有在低照度下良好拍摄的能力,并配置大屏幕液晶电视用于监视。
2 硬件系统设计
2.1 视频监控系统
根据要求监控地点选用矿用隔爆兼本质安全型摄像仪。主井口胶带机头:选用进口一体化变焦摄像机焦摄像机1台。1#振动筛:选用低照度彩色摄像机定焦摄像机1台。1#胶带头:选用低照度彩色摄像机定焦摄像机1台。1#胶带尾:选用低照度彩色摄像机定焦摄像机1台。2#振动筛:选用低照度彩色摄像机定焦摄像机1台。2#胶带头:选用低照度彩色摄像机定焦摄像机1台。2#胶带尾:选用低照度彩色摄像机定焦摄像机1台。粒度带尾:选用低照度彩色摄像机定焦摄像机1台。中粒度带尾:选用低照度彩色摄像机定焦摄像机1台。仓带头:选用低照度彩色摄像机定焦摄像机1台。仓带尾:选用进口一体化变焦摄像机焦摄像机2台。根据监控要求设视频服务器(硬盘录像机)1台。
2.2 胶带机集控系统
胶带机集控系统采用西门子PLC和工控机对现有的胶带机、给煤机和筛子等设备进行集中控制。采用1台S7-200可编程控制器结合1块EM222及1块EM221完成对胶带机、振动筛的控制,配置EM277模块实现和工控机的通讯功能,6套胶带机保护控制系统实现对带式输送机的控制保护,8台矿用隔爆兼本质安全型电磁起动器控制6条胶带机及2台振动筛,并采用研华的工控机共同构成胶带机集控系统。通过PLC可编程控制器进行内部设定程序,根据原煤集控系统的工艺过程,实现系统的集中自动控制、集中手动控制、就地控制,并对系统出现的故障进行处理。在集控室操作台上能集中形象地显示原煤运输的运行状态,并对系统的故障类型、故障地点给出相应的信息[2-4]。
3 PLC胶带机集控系统的软件设计
根据地面原煤运输系统的要求,对系统输入输出点进行分配,编制程序使整个控制系统对地面原煤运输工艺要求的适应性增强[5]。
3.1 PLC输入输出地址分配
根据系统控制要求,对6条胶带机和2个振动筛以及系统相应控制模式的输入输出接口进行统计,并留有相应的裕量。具体PLC输入输出端口配置如表1所示。

表1 PLC输入输出端口配置Table 1 Input and output configuration of PLC
3.2 控制程序设计
根据地面原煤运输系统工艺要求,控制系统程序设计主要实现对胶带机和振动筛的控制,使系统能够稳定可靠的运行。控制方式分为3类:集中自动、集控手动以及就地手动。本文介绍前两种控制方式。
1)集中自动方式。启动过程:点击集控台“起车预警” 按钮,发预警信号(打铃5 s),在预警信号发出后,1 min之内点击“集控起车”按钮,则胶带机集控系统按照程序设置,打铃2 s、停2 s、再打2 s后,按照仓带、转角带、粒度带、二号筛、二号带、中粒度带、一号筛和一号带的顺序启动。1 min内没有点击集控起车按钮,本次集控起车无效。启动过程中需要停止集控启动过程,按“起车中止”按钮,则已经启动的设备保持运行状态,未启动的设备不再启动。在集控中止后需要集控启动未启动的设备,按“集控起车”按钮即可按照工艺顺序启动剩余设备。
集控停车:在运行正常的情况下,实现全部停车,按“集控停车”按钮,则系统根据程序设置,按照一号带、一号筛、二号带、中粒度带、二号筛、粒度带、转角带、仓带的顺序逐步停车。如果不需要停止运行的设备,按“停车中止”按钮,系统停止执行集控停车程序,未停止的设备保持运行状态。在停车中止后需要停止运行的设备,再次按“集控停车”按钮,系统按照工艺顺序停止还在运行的设备。
2)集控手动方式。将工控机人机界面的手/自动选择设置为手动,将鼠标移近设备时,鼠标指针变成闪电样式,表示进入该设备的操作区域,单击控制设备左键,出现起动、停止、退出三个按钮,按钮底色是绿色表示允许进行该项操作,底色是灰色表示不允许,根据需要选择,如选择起动,则所选设备起动。
紧急停车:当遇到特殊情况如皮带撕裂、堆煤、跑偏等故障时点击人机界面的“紧急停车”按钮或者按下机柜上方的红色急停按钮,系统控制所有设备无延时瞬时停车。
3.3 设计故障程序
故障程序设计主要包括各种报警信号的应对处理及事故警报解除后的复位。安装在各个带式输送机的传感器对于出现的故障进行判断,检测烟雾报警信号和温度报警信号,当检测到烟雾浓度或温度超过标准时,需要开启事故报警铃发出事故报警,关闭电机,并开启电磁阀洒水降温降尘,设置延时检测程序,1.5 s后若电磁阀未正常开启或电机未正常关闭,发出故障报警信号,提示设备故障。检测2级跑偏报警、撕裂报警信号、煤位报警信号、速度报警信号,出现这些报警信号时需要开启电磁阀、关闭电机。
4 工控机人机界面设计
根据地面原煤胶带控制系统的要求设计见图2的操作界面,根据要求设计有起车预警按、全部自动、集控起车、集控停车、停车终止、紧急停车和故障确认等按键,设置有每台设备的自动、远控切换,设备的运行状态监控。根据工艺要求可以调整相应的时间参数以及故障报警界面。

图2 工控机人机界面设计Fig.2 Human-machine interface design of IPC (industrial personal computer)
5 视频监控中心设计
监控系统应是集现代化信息技术、语音技术、通讯技术、图像处理技术、自动控制技术、网络技术、人工智能技术等高新技术于一体的系统集成,利用科学手段达到对地面原煤运输系统状况的实时监视、检测、控制,保障生产安全和提高管理水平,填补了传统煤矿地面原煤运输安全监控系统存在的不足。视频监控系统设备列表如表2所示。
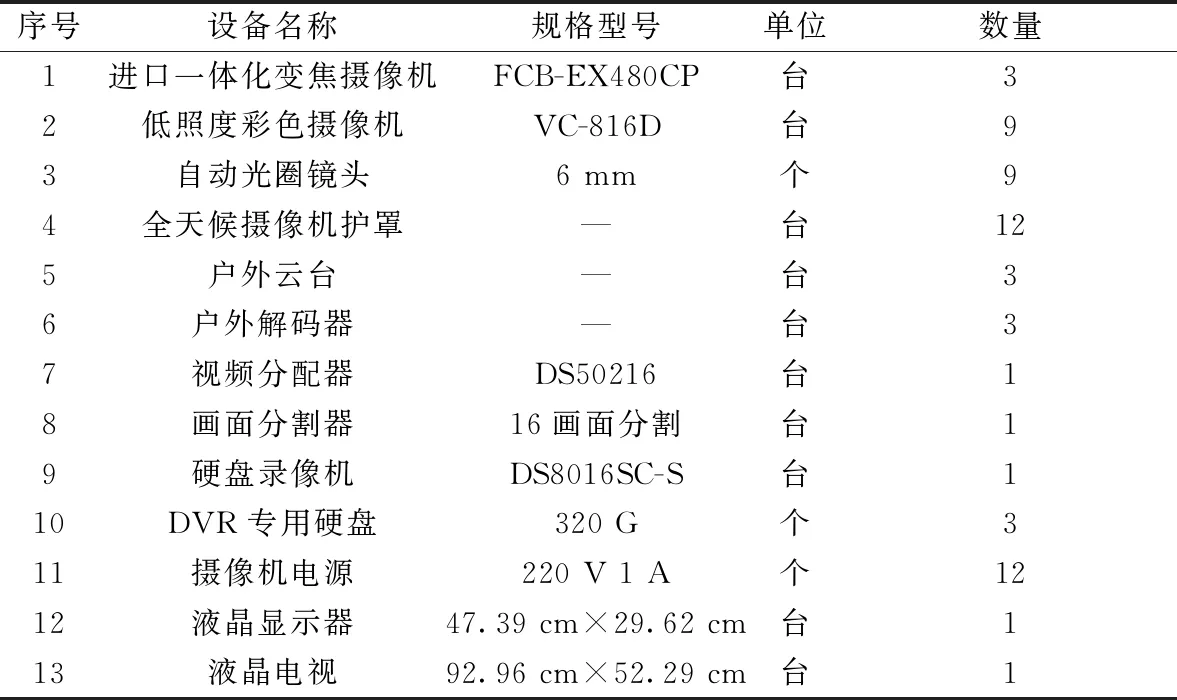
表2 视频监控系统设备Table 2 Device list of video surveillance system
视频采集系统将视频信号传输到监控中心,监控中心将视频信号输入硬盘存储,并通过画面分割器使用大屏幕等离子电视监看。利用远程视频监控系统,集控室监控人员可以直接对原煤运输情况进行实时监控,可以直观地监视和记录原煤运输情况,为分析事故提供相应的第一手图像资料。因此,远程视频监控系统是保障地面原煤安全生产的重要组成部分。
6 结束语
结合某企业对地面原煤运输的工艺流程,采用以PLC为核心的胶带集控系统结合视频监控技术,给出了基于视频监控的地面原煤胶带集控系统设计,并设计了该系统的PLC选型、控制程序。本系统使工作人员在控制室便可实时监控整个地面原煤运输系统的运行,对于系统的故障保护、安全可靠运行均有重要意义。
