基于SVM-KNN的人体步态相位识别
2019-11-05张语萌李志俊步子豪陶加贝
张语萌 李志俊 步子豪 陶加贝

【摘 要】本文对各种常用分类器进行优缺点分析,最后选择了基于阈值分割的SVM-KNN方法识别步态相位,并与SVM、KNN方法进行比较。
【关键字】外骨骼机器人;步态相位识别;SVM-KNN;阈值分割
中图分类号: TP242文献标识码: A 文章编号: 2095-2457(2019)28-0023-002
DOI:10.19694/j.cnki.issn2095-2457.2019.28.006
【Abstract】In this paper, the advantages and disadvantages of various classifiers are analyzed. Finally, SVM-KNN method based on threshold segmentation is selected to identify gait phase, and compared with SVM and KNN methods.
【Key words】Exoskeleton robot; Gait phase recognition; SVM-KNN; Threshold segmentation
外骨骼机器人技术现如今已广泛地应用在军事、生活、医疗等方面,外骨骼的控制方式是基于人的运动意图来进行控制的。目前有很多种方式可以获取人体的运动意图信号,根據不同的获取方式,可以简单地将控制方法分为三种:基于图像的方式、基于运动传感器的方式和基于生物电信号方式。分类算法的选择对于判断人体的运动意图的准确性,提高人体平地行走的步态相位模式分类的准确率非常重要。目前常用于模式分类的算法主要有神经网络、隐马尔可夫、模糊分类器、动态时间规整、支持向量机、K近邻法等。
1 基于SVM与基于KNN的分类识别方法
1.1 基于SVM的分类识别方法
支持向量机是一种二分类器,是针对线性可分类问题的最优化分类而提出的。支持向量机最重要的是求出最优超平面并且将两种分类样本正确地分开,同时使两个样本之间的间隔最大。二维情况下,线性可分的超平面如图1所示。图中H表示最优化分类线,黑点方形表示两种分类样本,H1和H2的距离L=2/‖w‖为分类间隔,H1和H2分别为穿过两类样本且与H最近的平行线,而穿过H1和H2上的样本为支持向量。
对于非线性问题,可以将向量映射到更高维的空间中,在高维空间中找出输入量和输出量之间的非线性关系。设点核函数K(X,X'),先通过非线性变换,将输入量变换到高维空间中,然后再在高维空间中求出最优线性超平面。
本文把人体平地行走时一个步态周期划分为5个相位,按照足底与地面接触情况和膝关节的角度划分了支撑前、中、后,摆动前、后5种相位模式。对sEMG信号进行预处理和特征提取后,采用SVM作为分类器进行分类。本文对人体正常平地行走状态下,去除开始和结尾数据,采集中间200个步态周期的sEMG信号特征值作为样本数据。步态周期时间约为1000毫秒,使用数据窗方法来提取特征值,数据窗长度为60ms,采样频率为2000Hz,即一个样本包含120个采样点数据,一个周期可以分为约16组样本,200个步态周期总共有3200组样本。其中5个步态相位(支撑前、中、后,摆动前、后)分别占一个步态周期时间的10%、40%、10%、20%、20%,即分别所占的样本组数为:320、1280、320、640、640。选取总样本数的80%作为训练集,20%作为测试集。本文SVM算法是用MATLAB编写的,从而实现对5种步态模式的识别,分类器识别结果得知一个步态周期中,5种步态相位的识别率在82.8%到89.8%之间,平均识别率为85.9%,平均识别时间为13.2ms,识别效果一般。
1.2 基于KNN的分类识别方法
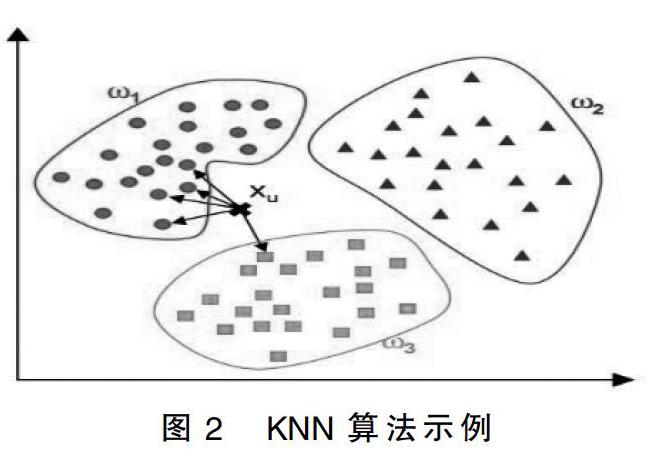
K近邻算法最早是由Cover和Hart在1968年提出的。该算法的核心思想是在已知样本集的类别条件下,对于某个测试样本在特征空间中,若与其K个近邻的样本中的大多数属于某一个类,那么该样本也属于这个类别。KNN方法在确定分类决策上只与K个最近样本有关,对于那些类域交叉或重叠较多的待分样本集,KNN方法比较合适,其分类方法简单直观,效果较好。但是当样本集规模较大时,对应的计算量也较大。
使用上述的实验方法再次进行实验,用KNN算法进行分类时,K通常选取质数以防止出现类别票数相同的情况。对于5种步态模式,本文选取K=5,其识别结果可得,5种步态相位的识别率在82.8%到91.4%之间,平均识别率为86.6%,平均识别时间为25.0ms,相较与SVM识别算法,KNN无需训练模型,但在识别中需要比较与所有样本的距离,当特征维数较大时,其计算量较大,识别所需时间较多,对于样本数较少时,其识别准确率比SVM算法略高,SVM算法需要在训练阶段对训练样本构造分类器,在训练阶段需要耗费一定的时间,但是分类器可以离线构造,在分类阶段其耗费时间较短,实时性较高。
2 基于SVM-KNN的分类识别方法
SVM算法对于非线性问题能够很好的解决,可以把非线性特征转换为线性特征,能够处理高维问题,泛化能力强,具有很好的稳定性,但是在距离超平面近的样本或类域交叉重叠、不平衡时,出错率比较大。
KNN方法在确定分类决策上只与K个最近样本有关,对于那些类域交叉或重叠较多的待分样本集,KNN方法比较合适。但是KNN方法的待测样本要计算所有已知样本的距离,计算比较复杂,耗时长,在特征向量维数较高时更为明显。
SVN-KNN改进算法。
本文提出了一种改进的SVM-KNN算法,能够解决常规SVM-KNN算法样本分布不均衡,特征值维数和权重等方面的问题,提高识别准确率,减小识别时间。改进的SVM-KNN算法具体步骤如下:
步骤1 对原始sEMG信号进行小波阈值去噪、巴特沃斯带通滤波和50Hz陷波滤波预处理。
步骤2 提取时域、频域和AR模型参数等特征值。
步骤3 对特征向量进行PCA降维处理。
步骤4 根据训练数据集计算出支持向量机的分类超平面和所有支持向量。
步骤5 计算测试样本X到分类超平面的距离|f(X)|。
步骤6 给定阈值ε(ε>0),若|f(X)|≥ε,使用优化参数的 SVM分类识别。若|f(X)|<ε,说明该测试样本点距离超平面较近,则用加权重的马氏距离算的KNN算法进行分类,以所有支持向量作为测试样本X的近邻样本。
3 改进的KNN-SVM步态识别
本文对原始数据集进行小波去噪,巴特沃斯滤波预处理,提取特征值得到特征向量样本集X={X1,…,XN},Xi={AVAi1,VARi1,RMSi1,…,AVAij,VARij,RMSij,…},一个特征向量Xi包含时域(4)、频域(3)、AR模型参数(4)共11种特征,j为肌电信号通道(股二头肌、阔筋膜张肌、股直肌、腓肠肌),共4个通道,因此一个特征向量包含44维数据,本文采用PCA降维方法取前4种主要成分作为最终的特征向量样本,即Xi={x1,x2,x3,x4}。选取总样本数的80%作为训练集,20%作为测试集,改进的SVM-KNN分类器识别结果如表1所示。
由上表可得,5种步态相位的识别率在90.6%到95.3%之间,平均识别率为93.3%,平均识别时间为15.6ms,识别效果较好。相较于SVM算法和KNN算法,KNN-SVM的识别准确率得到提升,并且识别时间较短,当测试样本到SVM分类超平面的距离超过阈值时,选用改进参数的SVM算法进行识别,当距离小于ε时,以SVM分类器的所有支持向量作为测试样本的近邻样本,用KNN算法进行识别,不需要计算与所有训练样本的距离,减少识别时间,提高准确率。本文经过多次试验,当阈值ε=0.7,K=3时,分类器分类器具有最高准确率达到93.3%左右。取不同阈值和K值时分类器的准确率如表2所示。
4 实验结果比较与分析
本文对同一数据样本集分别用SVM、KNN、传统SVM-KNN、改进SVM-KNN這4种算法进行识别,改进的SVM-KNN算法对步态相位模式识别的准确率相比传统的SVM-KNN算法有较为明显的提高,其对每种运动模式的识别率都在90%以上,摆动后期的识别率最高为95.3%,支撑后期的识别率较低为90.6%。
5 结论
本文提出的改进的SVM-KNN算法能够解决常规SVM-KNN算法样本分布不均衡,特征值维数和权重等方面的问题,提高识别准确率,减小识别时间,其主要改进点在于:
利用PCA方法对特征值进行降维处理,提高数据有效性,当测试样本和分类超平面之间的距离大于给定阈值时,用SVM算法识别,利用粒子群算法优化SVM惩罚参数C和核函数半径参数g,提高分类器性能;当测试样本和分类超平面之间的距离小于给定阈值时,则以支持向量(SVs)作为测试样本近邻样本,采用KNN进行分类,支持向量(SVs)能够充分代表训练样本集的含义,同时减小KNN算法对近邻样本的依赖性,利用加权重的马氏距离来计算的KNN算法样本间的距离。
【参考文献】
[1]杭成成.基于sEMG信号的下肢运动意图识别方法[D].武汉理工大学,2019.
[2]陈峰.可穿戴型助力机器人技术研究[D].中国科学技术大学,2007.
[3]张浩,刘志镜.加权DTW距离的自动步态识别[J].中国图像图像学报,2010,15(5):830-836.
