复杂环境下基于RSSI 指纹匹配的室内定位改进算法
2019-11-05周骁健王运锋
周骁健,王运锋
(四川大学计算机学院,成都610065)
0 引言
随着无线通讯技术的发展,越来越多的人开始关注室内外环境中移动目标的追踪定位。就室外环境而言,全球卫星导航系统(Global Navigation Satellite System,GNSS)为用户提供精确的位置服务。但由于卫星信号无法穿透障碍物,使得室内定位成为另一个研究方向。
Wi-Fi 网络的广泛普及,使得基于Wi-Fi 的室内定位技术,目前应用最为广泛。
相较于空旷无遮挡的室内环境,密集的人员流动和复杂的装修布局,会使得定位结果出现较大的误差。本文针对复杂的室内环境,对定位算法进行了改进,并以实验证明了改进算法的有效性。
1 主流算法与局限性
1.1 主流算法
目前主流的基于RSSI 的定位算法有两种:①基于RSSI 测距模型的位置估计;②基于RSSI 指纹库匹配的位置估计。
1.2 算法局限性与选择
基于RSSI 测距模型的定位算法,受RSSI 测量误差影响,实际距离与理论测算值存在较大偏差。由于这种方法在交点定位时,完全依赖距离计算结果,因此在复杂实验环境下,定位交点不确定性非常大。
传统基于RSSI 指纹匹配的定位算法,在人员流动、物品遮挡和同频干扰等多种因素影响下,使得实时报告值的随机性误差明显增大且不可忽略,如何提高实时数据与指纹库的匹配一致性,是该类算法的关键。
本文实验采用了一种改进后的指纹匹配算法。
2 实验算法改进
2.1 指纹数据采集改进
本文在实验过程中,发现并验证了采集点的垂直高度对数据采集准确性的影响。当实际定位的垂直高度与前期采集的高度不一致时,会因为空间遮挡存在较大差异,直接影响数据质量与匹配的一致性。
2.2 指纹库噪点滤除
一般而言,接入设备(Access Point,AP)采集到的RSSI 值是一组离散数据,符合正态分布,其概率密度函数为:

对大量离散数据进行高斯滤波,可以减小其中的奇异值对采集结果整体的影响。
本文在数据采集时发现,指纹数据的质量,还可能受到发射与采集设备性能的影响。实验现象为:在某一段时间内,采集设备的报告值普遍异常,且偏离趋势与信号在该传播路径上的衰减趋势不符。实验对比了两款不同采集设备:小辣椒-20150718 和华为CAZAL10,均有这种现象发生,此时高斯滤波修正效果不明显。
针对这种指纹库的噪点,本文改进了基于邻域均值的滤波方法,在考虑到各分区的相对独立性后,只在各分区内,采用线性插值进行噪点滤除,并不遍历整个指纹库。后续实验结果,验证了插值修正对定位准确性的改进效果。
2.3 定位算法改进
本文在定位阶段,从提高定位准确性与减小匹配计算量的角度出发,改进的整体思路为:先分区,后定位。
分区的思想基于K-means 聚类算法,即每一个区域都是一个独立的聚类中心,且质心的各维AP,相对强弱特征唯一。当待定位设备进入时,分配欧氏距离最近的聚类中心,实现分类。
分类完成后,在局部区域内,进一步实现准确定位。
2.3.1 算法流程
算法流程如图1。

图1 算法流程
2.3.2 具体步骤
(1)确定所有聚类中心的质心,即该区域内所有采集点的加权平均:

其中:n 表示划分的区域数。以第i 个区域为例,其质心的特征量组为:

其中,m 表示区域特征量组的维度,即需要计算m个接入设备(Access Point,AP)的特征量。
以该区域第k 个AP 为例,其加权平均值为:

其中,q 表示该区域共有q 个参考节点(Reference Point,RP)。
(2)对实际报告值做滤波修正。
对比两种不同的限幅滤波算法,方法一:用前一周期的报告值滤波;方法二:用前期全部值的均值滤波。文本在后续,以实验结果作为选择依据,并探讨了可能的原因。
(3)对步骤(2)修正后的报告值进行区域分类。
(4)局部分区实现准确定位。
采用加权K 值最近邻(WKNN)算法进行定位,对加权方法做了对比实验的选择,并提出了方法中的参数获取的改进。假设匹配结果满足条件的RP 个数为K’,最终定位结果取决于这K’个RP 的加权平均,具体坐标为:

公式(5)中,关于权值ωi的算法选择,本文对比试验了两种主要方法:
方法一:基于指纹库的方差加权。
方差δi越大,认为该参考节点(RP)的信号波动越大,权值应当越小。加权公式:

其中:

方法二:基于指纹库的欧氏距离加权。
对于区域内每一维度的AP,与实际报告值欧氏距离越近的AP,权值应该越大。基于此思想,引入带欧氏距离di的加权公式:

其中,c 为常数。公式(8)中:

可知:

通常ωi的公式为
引入常数c 的原因在于,当某一AP 的报告值与指纹数据相同时,di值为0,此时使用加权会使该维度权值无限大。后续实验讨论了c 在特定环境下的适应性取值,并通过多个定位结果的拟合曲线,确定了本实验环境下,常数c 的最佳值。
3 实验设计与结果分析
3.1 本文实验环境及设备
实验环境为6m×8m 写字楼办公室,室内人员流动性较大,桌椅布局密集,房间隔断墙材料不统一。另外写字楼内其他Wi-Fi 信号杂多。具体情况见图2。

图2 实验环境
路由器位置为Wi-Fi 信号标识处。
根据算法描述,实验区域分为四个区块,即公式(2)中n 为4;
接下来将定位区域网格化,共确定36 个参考节点(Reference Point,RP)。每个RP 的接入设备(Access Point,AP)为3 个,即公式(2)中的m 取值为3,ID 分别为:trst、ea38、925a。每一个AP 采集数据5 分钟,共300 组。
区域划分与参考节点部署如图3。

图3 区块划分与参考节点部署
3.2 对比实验及结果
3.2.1 采集点垂直高度与区域内线性插值
指纹库的采集结果如图4(以trst 为例)。

图4 原始指纹库
图5 可以看出,在修正采集高度和分区滤噪后,指纹库的信号强度在各区域内衰减趋势更加明显,更符合实际。
实验数据结果:定位的区域误判率从40.15%降低到25.78%;正确区域内最大距离误差从1.86 米下降至1.30 米,平均误差从1.48 米下降至1.20 米。点迹如图(横纵坐标均为实验室边长,单位:米)。

图5 改进指纹库
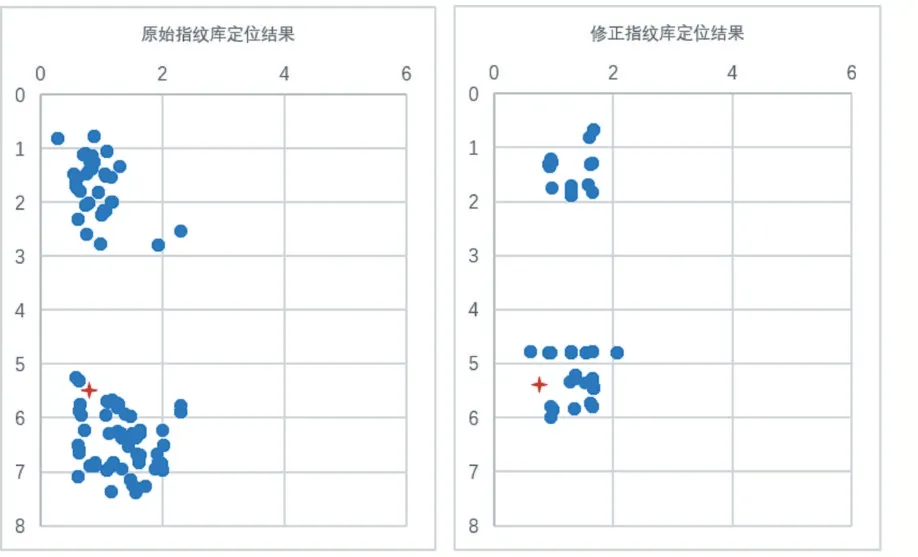
图6 指纹库修正前后定位结果对比
实验效果的改进可以证明,在复杂环境指纹库的建立过程中,数据采集的垂直高度和指纹库的噪点,两个因素均不能忽略,前者误差在采集时需要人为规避,而后者则可能与路由器发射功率不稳定性有关。
3.2.2 滤波算法的选择与改进
实验对比的两种滤波方法,定位点迹如图7。

图7 不同滤波算法的定位结果对比
理论上分析,采用上一周期报告值滤波,可以有效克服偶然因素引起的干扰,波动幅度受到约束,结果的离散性应该更小;采用前期均值滤波,滤波效果依赖于前期多组定位结果均值,平均误差应该更小,但需要多周期数据累积,以满足计算需要,实时性牺牲较大。
数据结果如下:
(1)前一周期值滤波
定位误差标准差:0.31 米,平均误差:1.27 米。
(2)均值滤波
定位误差标准差:0.48 米,平均误差:1 米。
符合理论判断。并且,两种滤波都能使区域误判率明显下降。
考虑到室内定位的实时性要求,采用前一周期值滤波更为合适。
3.2.3 加权方法对比
分别使用算法描述中的两种加权方法,对比定位结果,点迹描述如图8。

图8 不同加权办法的定位结果对比
可以看出,基于欧氏距离的加权办法,定位结果更趋于集中,且最大误差也在1 米范围内。
原因在于,基于欧氏距离加权,对数据质量好的维度更加敏感,定位准确性更依赖于滤波后的数据质量;而方差加权对指纹库更加依赖,但前期数据的方差,受采集时的人流、噪声影响较大,与后期实际定位时的相关性更弱。
因此,本实验选择基于欧氏距离加权。
3.2.4 常数c 的确定
不同环境下,常数c 需要适应性调整。通过多次实验,对比定位误差与误差标准差两项指标,选择最佳的c 值。
(1)不同c 的定位误差与拟合曲线如表1。

表1 不同C 值下的定位误差

图9 定位误差拟合曲线
(2)不同c 的误差标准差与拟合曲线如表2。

表2 不同C 值下的误差标准差

图10 误差标准差拟合曲线
从拟合结果可以看出:
当c 过小时,欧氏距离小的训练结果权值较大,而非近邻的训练点会衰减很快。虽然这种情况是我们希望的,但有时候也会使算法对噪声数据变得更加敏感,使得多次定位结果的方差较大;
当c 过大时,加权效果不明显,定位结果更加接近于均值,导致定位误差变大。
综合上述两个结果,c 取值0.53。
3.2.5 各区域测试点定位结果
最后,在整体实验区域内选择4 个测试点,位置如图11。
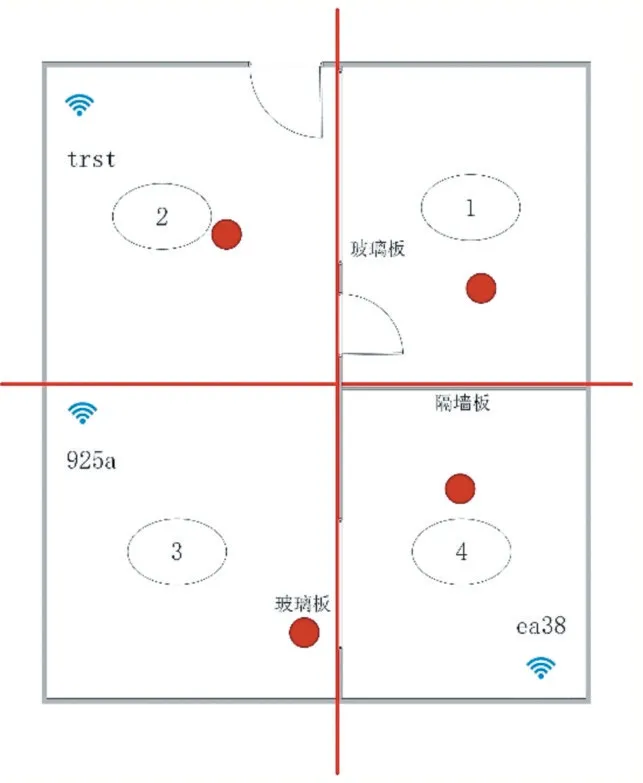
图11 测试点部署
对比算法改进前后的定位结果,如图12。

图12 测试结果
原始定位结果(上图黄色点)均方根误差(RMSE)为0.94 米,算法改进后定位结果(图12 蓝色点)的RMSE 为0.35 米。可以证明,改进算法对于复杂环境下室内定位精确度的提高,具有实用性。
其中,区域三的改进效果最为明显,原因在于该测试点靠近区域三与区域四的分界点。原始报告值的波动会造成严重的区域误判,而错误区域内的加权结果,相较于真实点的位置,误差更大,因此改进效果更为明显。
4 结语
对于经典的基于指纹库匹配的室内定位算法,本文分别从指纹数据采集与噪点滤除、报告值滤波算法选择和WKNN 算法的权值ωi确定,三方面进行了改进。
首先,在实验设计上,整体采用“先定区,后定位”的思路,减少置信度低的AP 对定位结果的影响,同时能明显减少计算量,提高定位效率的同时,在准确的区域内实现更精确的定位。
其次,定位算法的三个改进方面分别为:①在数据指纹建库过程中,考虑了采集点高度和指纹库噪点两项因素,并通过实验证明其对最终定位结果的影响;②在对实际报告值的修正过程中,综合了定位离散性和实时性的需求,选择基于前一周期值的动态滤波算法;③在加权定位阶段,分析并选择最优的ωi计算方法,并通过多结果的拟合曲线,确定了本实验场景下的最佳常数c。
最后,在各分区随机选择测试点,试验并证明了本文改进的定位算法,在实际场景下的有效性与实用性。
