基于三相锁相环的PWM整流器双闭环控制研究
2019-11-02刘德意潘昌忠
刘德意,潘昌忠,罗 晶
(湖南科技大学 信息与电气工程学院,湖南 湘潭 411201)
0 引 言
PWM整流器具有能量双向流动、降低网测谐波及实现单功率因数工作的特点,在电气传动和电源变换等领域被广泛应用[1]。然而在实际应用中,PWM整流器的性能可能会受各种不确定外界干扰的影响,特别是当负载变化时,会对整流器的输出带来较大的冲击,因此如何提高PWM整流器的抗干扰能力是目前电力电子领域研究的一个重点方向。文献[2]建立了三相电压型PWM整流器在静止abc坐标系和同步旋转dq坐标系下的数学模型;文献[3]设计了双闭环PI控制器;文献[4]设计了滑模变结构控制器;文献[5]在电机的滑模控制中应用了“边界层法”;文献[6]提出了基于H∞和L2非线性控制方法;文献[7]设计了电流内环解耦控制器和电压外环滑模控制器。然而,这些控制方法的抗干扰能力均有限。
本文设计一种基于三相锁相环和滑模变结构的双闭环控制策略。首先,给出三相电压型PWM整流器的数学模型;然后,进行双闭环控制策略设计,包括应用三相锁相环将三相静止abc坐标下的电压电流进行等功率park变换成同步旋转dq坐标下的电压电流、采用“边界层法”的滑模变结构电流内环控制器、以及PI外环电压控制器。所设计的控制策略对负载干扰具有较好的鲁棒性能。最后,在Matlab/Simulnk环境下对控制方法的有效性和优越性进行验证。
1 三相电压型PWM整流器的数学模型
图1是三相电压型PWM整流器的拓扑图,左侧是系统的交流侧,其中ea、eb、ec是交流侧输入电压,ia、ib、ic是交流侧输入电流,L是交流滤波电感,R为电感寄生电阻,O为中性节点。右侧是系统的输出侧,其中C是直流输出侧滤波电容,RL是输出侧负载。中间部分则是PWM整流器,它有2个桥臂Sa,b,c与每个桥臂有3个全控性半导体器件。定义开关函数sa,b,c=1表示上桥臂Sa,b,c导通,下桥臂关断;sa,b,c=0代表上桥臂Sa,b,c关断,下桥臂导通。因此三相电压型PWM整流器有8组开关状态(23=8),在不加以控制的情况下每组开关状态的工作时间都是一样的,因此通过控制每组开关状态和工作时间来控制输出侧的直流电压。

图1 三相电压型PWM整流器拓扑结构
应用基尔霍夫电压、电流定律可得图1所示PWM整器的数学模型为[2]:

对三相abc坐标下的数学模型进行等功率park变换得到同步旋转dq坐标下的数学模型为:

2 双闭环控制策略设计
针对三相电压型PWM整流器输出容易受负载干扰影响的问题,本文提出了如图2所示的双闭环控制策略。图中包含三相锁相环(3PLL)模块、电流内环滑模控制器及电压外环PI控制器。
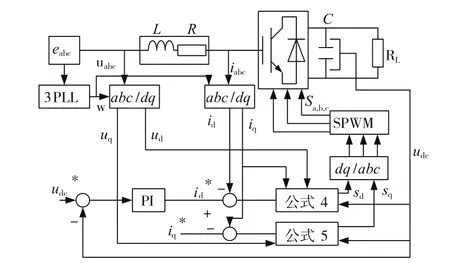
图2 双闭环控制系统
首先,应用三相锁相环(3PLL)输出abc/dq变换所需参数w(w是dq同步旋转角速度参数)。三相锁相环(3PLL)模块如图3所示,其中abc/αβ是静止坐标变换,αβ/dq是park变换[8]。它的工作原理为:静止坐标下的变量 ua、ub、uc经过 abc/αβ 转换成 uα、uβ,然后uα、uβ经dq/αβ转变成ud、uq。以uq=0为控制目标,uq为反馈变量,比例积分环节(kp+ki/s)是环路滤波器,可以稳定输出同步旋转dq坐标下的参数w。
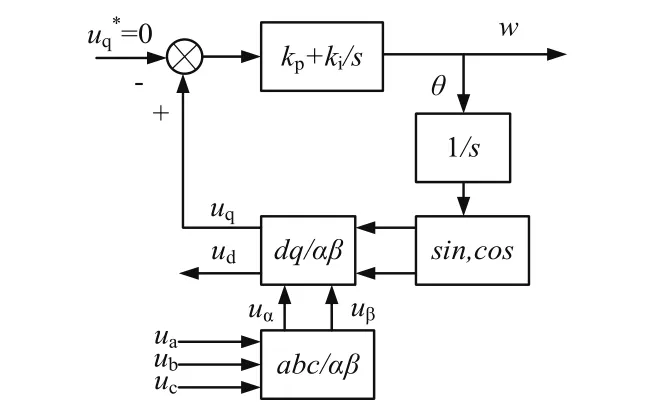
图3 三相锁相环(3PLL)模块
三相电压经过三相锁相环输出abc/dq变换需要的参数 w,ua、ub、uc,ia、ib、ic经过 abc/dq 变换转变成同步旋转dq坐标下的ud、uq,id、iq。是电压外环PI控制的给定参数,滑模控制参考值,iq=0、uq=0时系统就处于稳定状态。电压电流的dq变量经过双闭环控制调节后,在经过dq/abc输出三相abc变量,经SPWM调制成开关信号控制PWM两个桥臂上的全控型开关器件,调节交流输入侧的输入。
然后,设计电流内环控制器。考虑到电流内环是功率因数调节环,需要较快的动态响应,因此用滑模控制替代传统的PI控制,并采用“边界层法”降低滑模控制带来的抖震。ia、ib、ic经abc/dq转变成id、iq,并定义2个滑模控制面,是id、iq的给定值,其中=0。然后,设计电压外环PI控制器,为减小三相电压型PWM整流器输出侧直流稳态误差,将滑模控制与SPWM调制视为一个一阶惯性环节[9],再进行PI控制器参数整定,是电压外环的给定值。
针对电流内环,定义2个滑模面:

其中,α1、α2为滑模面控制参数,并且都是正实数,分别是id、iq的给定值。采用滑模变结构控制避免不了抖震,但是可以抑制。本文应用“边界层法”来降低抖震,定义饱和函数为:

其中,k>0,Δ是“边界层”,且k·Δ=1,将式(4)代入dq坐标下的数学模型式(2)得到电流内环控制器为:
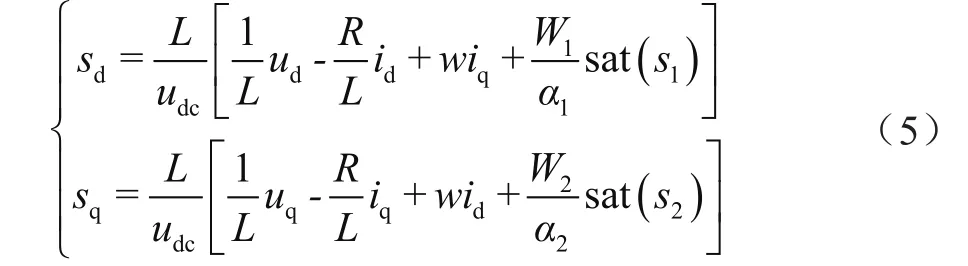
其中,W1、W2是滑模控制参数,均大于零[5]。
最后,设计电压外环PI控制器。根据同步旋转dq坐标的数学模型方程组(2)和(5)可以将电流内环和SPWM调制等效成一个一阶惯性环节[9],即:

其中,Ts是采样周期。设计电压外环PI控制器为:

其中,Kpi是PI控制比例参数,τi的倒数是PI控制积分参数。那么系统的开环传递函数为:
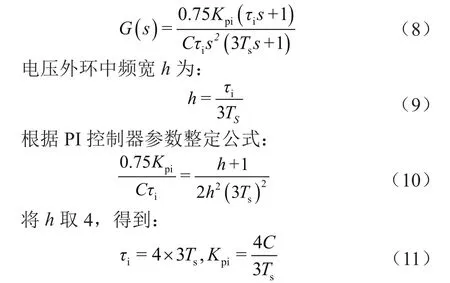
由式(4)、式(5)整定滑模控制器参数,由式(11)整定PI控制器参数。
3 仿真结果与分析
基于Matlab/Simulink软件对传统的双闭环PI控制与改进后的双闭环控制进行仿真,将三相电压型PWM整流器的直流输出端波形进行对比,以验证方法的有效性和优越性。
设置仿真参数:ea、ea、ec都为220 V,依次相差120°,频率f=50 Hz、R=0.3 Ω、L=0.02 H、C=990 μF负载电阻RL=100 Ω。滑模变结构控制器参数:α1=0.755、α2=0.55、W1=16 000、W2=4 600、k1=k2=15.5,PI控制器的给定电压是400 V。Kpi=0.198、τi=0.067 7,饱和限幅值Usat=±5 V。在仿真实验过程中,当t=0.2 s时,加入并联的200 Ω电阻来改变负载,在t=0.4 s时,将PI控制器的给定电压改为450 V。仿真结构如图4所示,其中实线是PI-SMC控制,虚线是PI-PI控制。
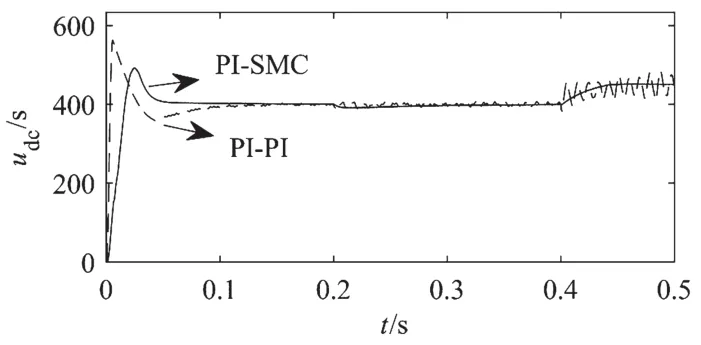
图4 输出电压仿真对比结果
由仿真结果计算两种不同控制下直流输出端的电压超调值,在给定电压参考值为400 V时,PI-PI控制下的电压最大值有564 V,而PI-SMC控制下的电压最大值只有480 V,相比之下超调减少了21%;PI-PI控制下输出端电压在t=0.15 s后实现电压跟踪,而PISMC控制下输出端电压在t=0.1 s前就实现了电压跟踪。当t=0.2 s时,负载电阻在由100 Ω突变为66 Ω,PI-PI控制输出侧电压在t=0.35 s后实现电压跟踪但稳定性不如前段时间,而PI-SMC控制则在t=0.3 s前恢复稳定且实现电压跟踪;当t=0.4 s时,将电压外环PI控制器给定值由400 V变为450 V,PI-PI控制下的电压波形会经历一段时间的震荡,而PI-SMC控制下的电压在t=0.45 s前就会恢复稳定。通过对比可知,本文设计的双闭环控制相比于传统双闭环PI控制,输出侧的直流电压质量更高,抗干扰能力更强。
4 结 论
本文基于三相锁相环,将三相电压型PWM整流器由静止abc坐标下的数学模型转换成dq同步旋转坐标下的数学模型;对其设计双闭环控制方案,电流内环采用滑模控制,并用“边界层法”降低抖震;将电流内环与SPWM调制视为一阶惯性环节的基础上设计电压外环PI控制器。仿真结果证明,本文所设计的三相电压型PWM整流器双闭环控制方案优于传统双闭环控制方案,其电压跟踪更快、抗干扰能力更强、稳态误差更小,验证了本文双闭环控制方案的有效性与优越性。
