基于可拓优度评价的智能汽车横向轨迹跟踪控制方法*
2019-11-02蔡英凤秦顺琪孙晓强
蔡英凤,秦顺琪,臧 勇,孙晓强,陈 龙
(1.江苏大学汽车工程研究院,镇江 212013; 2.江苏大学汽车与交通工程学院,镇江 212013)
前言
汽车智能化技术作为解决交通安全、交通拥挤和环境污染问题的重要手段,正引发世界各国的新一轮角逐,受到各国学者的广泛关注。自动驾驶作为智能汽车发展的高级阶段,其核心之一是控制系统,汽车所有的动作都由该系统进行控制,性能良好的控制系统对整个自动驾驶汽车平台的运行具有重要的作用。车辆横向控制是指车辆在沿着期望路径行驶过程中,通过算法决策和底层执行装置的作用,使横向位置偏差和航向偏差尽可能小,同时车辆应具有一定的稳定性和行驶安全性[1]。
普通车辆为前轮驱动,自动驾驶汽车横向轨迹跟踪控制通过调节前轮转角保证车辆横向控制精度和车辆行驶的安全性稳定性。横向控制主要有预瞄式参考系统和非预瞄式参考系统两种。预瞄式参考系统主要以车辆前方位置的道路曲率作为输入,以车辆与期望路径之间的横向位置偏差或航向偏差为控制目标,通过各种反馈控制方法设计对车辆动力学参数鲁棒的反馈控制系统,如基于雷达或摄像头等视觉传感器的参考系统。非预瞄式参考系统根据车辆附近的期望路径,通过车辆运动学模型计算出如车辆横摆角速度等描述车辆运动的物理量,然后设计反馈控制系统进行跟踪。如今常用的横向控制方法有经典控制方法[2]、最优控制方法[3]、自适应控制方法[4]、滑模控制方法[5]、鲁棒控制方法[6]、模型预测控制方法[7]和模糊控制方法[8]。经典控制方法采用PID控制方法,通过横摆角速度反馈将横摆运动和横向运动解耦,使用动态前视和横摆角速度反馈两种方法,实现智能汽车横向控制[9]。最优预瞄横向控制算法同时考虑车辆当前偏差、预瞄点偏差和控制变量的有限时间二次型性能指标函数,运用最优跟踪算法设计了最优预瞄控制器,实现车道保持控制[10]。自适应控制方法根据输出约束条件,自适应地控制车道保持过程中横向偏差,保证车辆运动的稳定性[11]。文献[12]中提出了一种基于轨迹跟踪误差的鲁棒控制方法,将前馈控制和鲁棒控制策略相结合,设计了线性模型预测控制器,使直线和曲线工况的跟踪误差均满足要求。文献[13]中基于7自由度非线性车辆动力学模型,设计滑模控制器跟踪期望横摆角速度,使车辆稳定地跟踪目标路径。文献[14]中采用2自由度自行车模型和魔术公式轮胎模型,对自主车辆的自动转向控制提出了一种非线性模型预测控制(NMPC)方法。自动调节的模糊控制器采用带约束的迭代遗传算法来控制无人驾驶车辆的转向,通过迭代调整模糊控制器的隶属函数和规则库,达到控制要求[15]。然而,上述的控制方法约束条件较多,有效控制区域小,在某些工况下控制效果不佳,尤其对于道路曲率变化范围大的混合工况,会出现求解失败、控制误差大的问题。除经典控制方法外,大多数控制器计算量大、迭代速度慢,对于硬件要求高,实车移植性差,不同工况下控制器切换不协调。
本文中主要针对单一控制策略控制范围有限的问题,基于蔡文提出的可拓理论,提出了可拓优度评价控制方法。可拓优度评价方法是可拓学中评价一个对象,包括事物、策略和方法等优劣的基本方法,根据实际问题的需要,制定符合技术要求的评价标准,确定出衡量指标,反映出利弊的过程及其变化情况,从而评价一个对象的优劣[16]。将上层控制器的输出量分别输入到车辆动力学模型,得到车辆状态预估量,以此作为车辆横向控制的评价指标,从而计算出各评价对象的优度值。根据实时的车辆状态和优度评价控制方法有针对性地采用优度更高的输出值,提出一种基于可拓优度评价的智能汽车横向轨迹跟踪控制方法,可使整个控制过程取得良好控制效果,将误差控制在较小的范围内。因此,可将可拓优度评价方法运用到智能汽车横向轨迹跟踪控制系统,保证车辆运动过程中的精确跟踪。
1 车辆动力学模型和路径跟踪预瞄模型的建立
1.1 车辆2自由度动力学模型
采用2自由度车辆动力学模型,该模型只考虑沿车辆y轴的侧向运动和绕z轴的横摆运动,并做如下假设:
(1)忽略汽车的空气阻力;
(2)假设汽车在水平路面行驶,且忽略车辆的滚动阻力;
(3)假设汽车两前轮和两后轮的转向角大小分别相等且车轮的外倾角为0;
(4)忽略转向系在车辆转向过程中的作用,直接以前轮的车轮转角作为系统的控制输入;
(5)假设汽车的悬架是刚性的,车身不存在垂直于地面的上下运动、前后俯仰和车身的侧倾,车身的运动平行于地面;
(6)忽略转弯过程中汽车质量的左右偏移,假设左右两侧车轮所受地面的垂向反力相等[17]。
车辆2自由度动力学模型示意图如图1所示。根据牛顿第二定律定理可得沿y轴的力平衡方程和绕z轴的力矩平衡方程[17]:
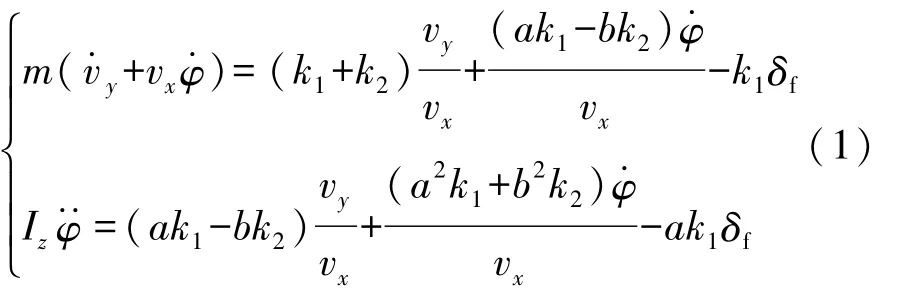
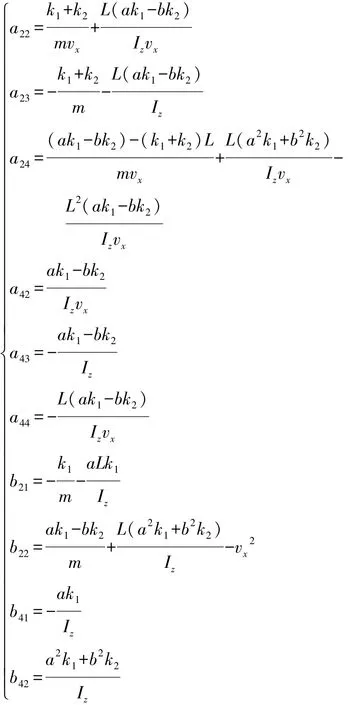
式中:m为车辆质量,kg;vx,vy分别为车辆纵向速度、横向速度,m·s-1;δf为车辆前轮转角,rad;Iz为车辆绕z轴的转动惯量,kg·m2;a,b分别为车辆质心至前轴和后轴的水平距离,m;k1,k2分别为前、后轮轮胎的侧偏刚度,N·rad-1;φ·为车辆横摆角速度,rad·s-1。
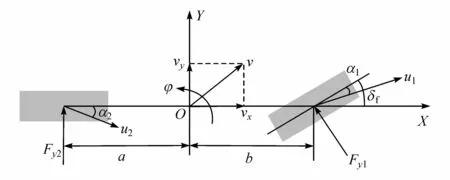
图1 车辆2自由度动力学模型示意图
1.2 路径跟踪预瞄模型
车辆在轨迹跟踪过程中,运动过程包括车辆的平移运动和旋转运动,路径跟踪预瞄偏差模型如图2所示[18]。
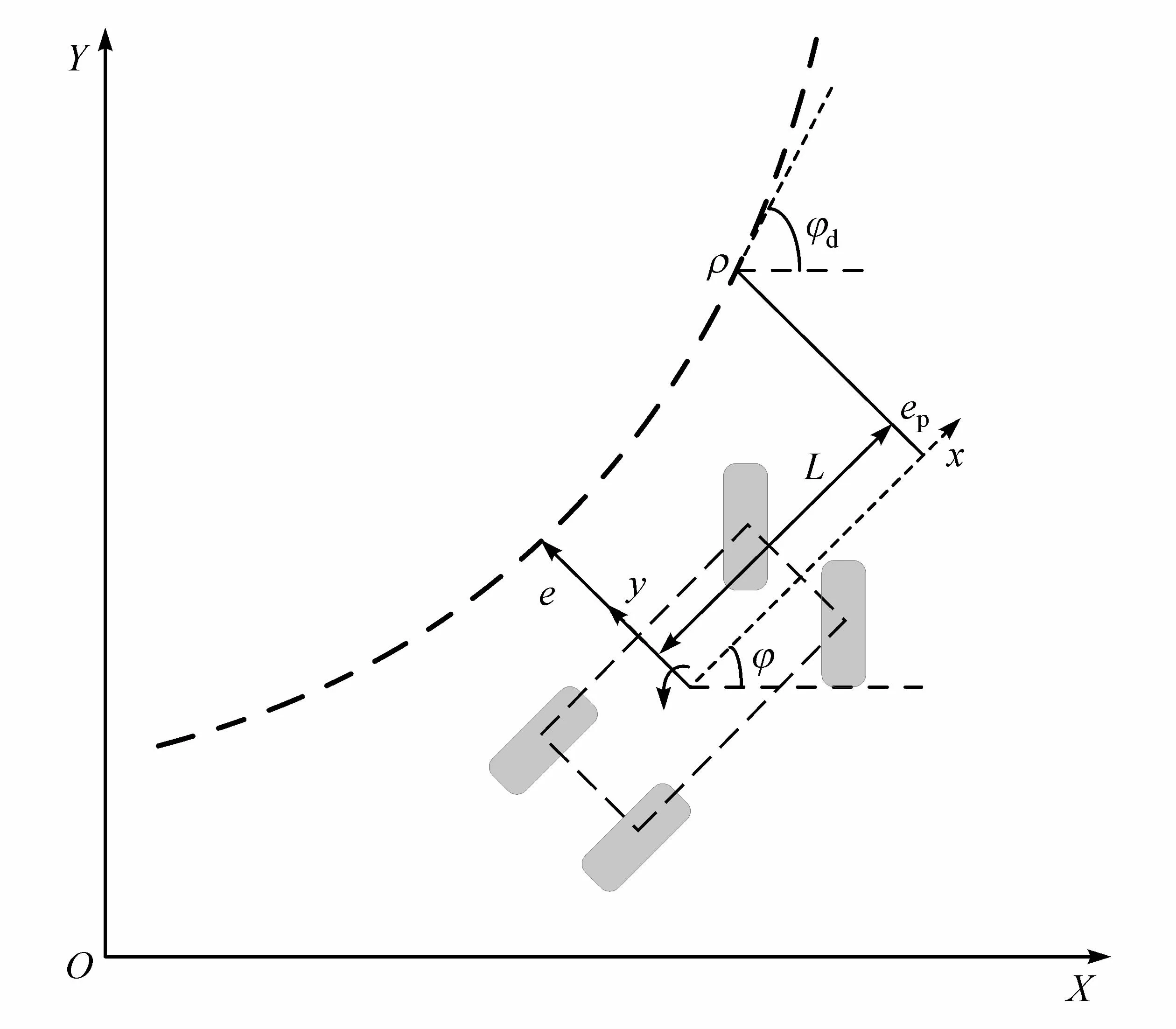
图2 路径跟踪预瞄偏差模型图
图2 中:L为预瞄距离,m;ep为预瞄点的横向位置偏差,m;e为车辆质心处横向位置偏差,m;φ为车辆航向角,rad;φd为道路中心线切线与大地横坐标的夹角,rad。
定义φr为车辆与道路中心线的航向偏差:

根据几何关系可得

因 tanφr≈φr,故

对ep求导可得

根据几何关系可得

其中,车辆纵向速度vx为常数,道路中心线曲率ρ为道路中心线圆半径的倒数,为已知量。
因此有

车辆轨迹跟踪过程质心处与道路中心线之间的横向位置偏差的变化率为

因 cosφr≈1,sinφr≈φr,故

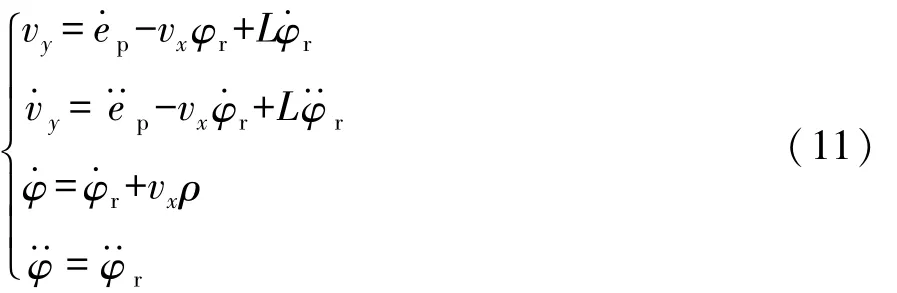
将式(9)代入式(5)可得

化简可得车辆状态量侧向速度vy、侧向加速度v·y、车辆横摆角速度φ·和车辆横摆角加速度φ··与路径跟踪预瞄偏差模型中参数的关系,即路径跟踪预瞄偏差模型:
将路径跟踪预瞄偏差模型与车辆2自由度动力学模型结合,构成车辆-道路预瞄偏差模型,选取ep,为状态空间方程的状态量,可得车辆-道路模型的状态空间方程·x=Ax+Bu[19]:
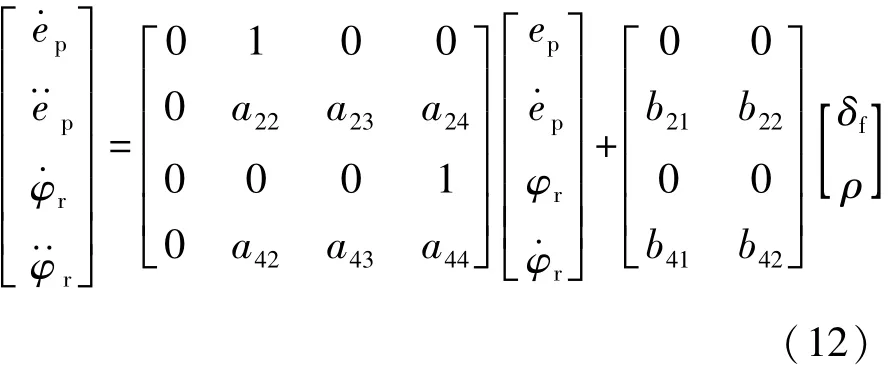
其中:
2 系统设计
本文中所提出的基于可拓优度评价的智能汽车横向轨迹跟踪控制方法的控制流程图如图3所示,由上层控制器和下层控制器两部分构成。
2.1 上层控制器
上层控制器中车辆-道路状态量实际采用的摄像头为AVT ALLIED PIKE F-421B/C,摄像头通过CAN总线连接到自动驾驶试验车处理器,通过摄像头采集处理的数据可用于MATLAB/Simulink仿真。由于摄像头远距离对道路信息采集时存在偏差大和置信度低的问题,为了保证摄像头采集信息对控制系统可信度的要求,对该型号摄像头设置参数极限值,如表1所示。
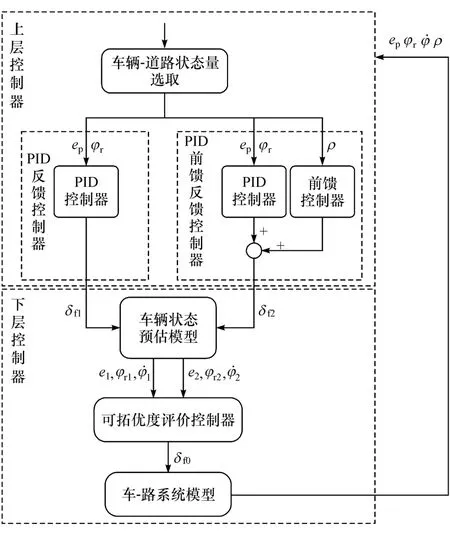
图3 基于可拓优度评价方法的横向轨迹跟踪控制流程图
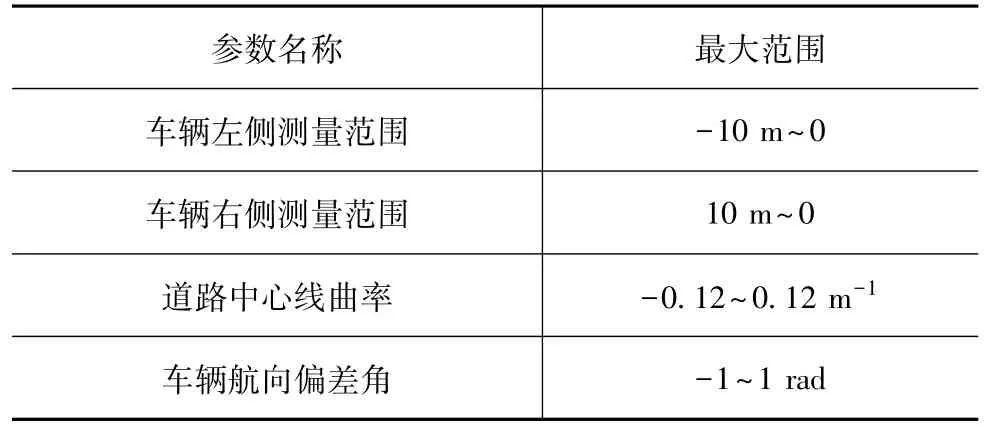
表1 摄像头有效测量极限参数值
上层控制器包括基于预瞄偏差的PID反馈控制和基于道路曲率的PID前馈-反馈控制。PID反馈控制适用于曲率较小的道路,只需要小幅控制,即能实现横向轨迹跟踪。预瞄偏差包含预瞄点处的横向位置偏差ep和车辆航向与道路期望航向之间的航向偏差φr。在设计PID反馈控制器时,须同时调节这两个偏差,以获得最优的前轮转角输入,使车辆横向控制过程中不仅有较小的横向位置偏差,还能保证车辆与期望轨迹之间有较小的航向偏差[20],可通过加权相加的方式来实现两者偏差调节量的叠加。
PID前馈-反馈控制适用于车辆转弯半径较小、道路曲率较大的工况,要求车辆快速响应,故采用基于前方道路曲率的前馈控制加以抑制,保证车辆能及时将车轮转到所需的转角上,使车辆前轮转角快速响应,提高了控制系统对于小曲率路径干扰的响应速度,同时也减小了车辆转向控制的滞后和波动[21]。
2.2 下层控制器
下层控制器利用可拓优度评价控制器来评价上层两控制器的优劣,从而选择优度高的控制器输出值。
可拓优度评价控制器基于可拓学优度评价方法来选取优度较高的控制器输出值,优度评价方法流程图如图4所示,具体过程如下[16]。
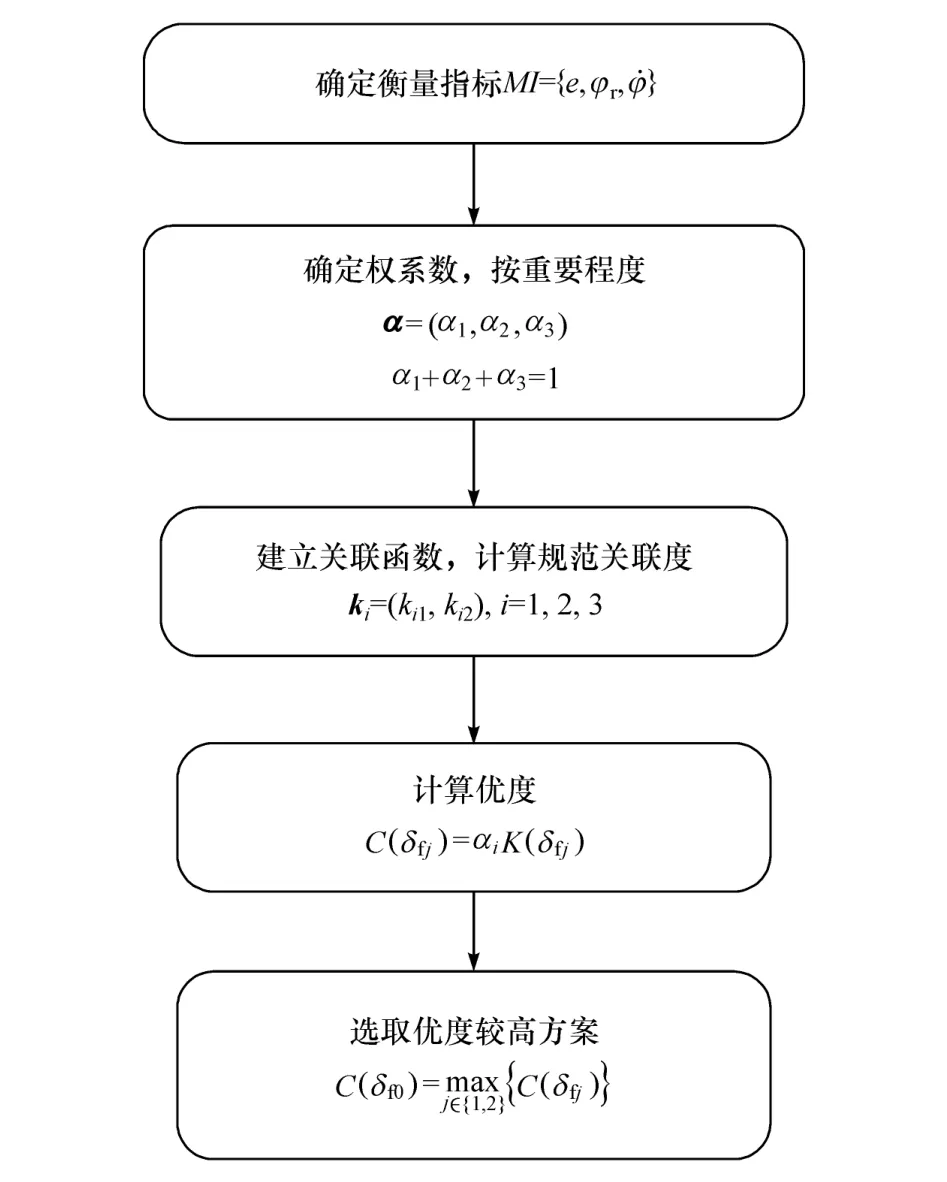
图4 优度评价方法流程图
(1)确定衡量指标
要评价一个对象的优劣,首先须规定衡量指标。优劣是相对于一定的标准而言。一个对象,对某些衡量指标是有利的,而对另一些衡量指标可能是有弊的,因此评价一个对象的优劣必须反映出利弊的程度及其可能的变化情况。将PID反馈控制和PID前馈-反馈控制的输出量分别输入到基于车辆动力学模型的车辆状态预估模型中,得到对应车辆状态预估量:车辆质心处横向位置偏差e1,e2,车辆航向偏差 φr1,φr2和车辆横摆角速度·φ1,·φ2。以此作为衡量指标:

(2)确定权系数
评价两个控制器输出值 δfj(j=1,2)优劣的 MI={e,φr,φ·}各衡量指标 MIi有轻重之分,以权系数来表示各衡量指标的重要性程度,分别赋予(0,1)的值。权系数记为

其中 α1+α2+α3=1
依据重要程度取:车辆质心的横向位置偏差权重 α1=0.5,车辆航向偏差权重 α2=0.3,车辆横摆角速度权重 α3=0.2。
(3)建立关联函数[22]
以车辆质心的横向位置偏差e为例,建立关联函数。选择特征量最优状态点均为原点S0(0,0)。质心的横向位置偏差S(e,e·)与最优点S0(0,0)的加权可拓距为

横向位置偏差经典域界可拓距为

横向位置偏差可拓域界可拓距为

根据实时状态下质心的横向位置偏差可拓集合点S(e,e·)与最优点S0(0,0)的可拓距|SS0|和经典域界与可拓域界可拓距可计算两者关联函数,即

(4)计算关联度
衡量指标 MI={e,φr,φ·},权系数分配为 α=(α1,α2,α3),根据各衡量指标要求,把对象 δf1和 δf2关于各衡量指标MIi的关联函数值简记为Ki(Sj),则各对象 δf1,δf2关于 MIi的关联度为

将上述关联度进行规范化:

则各对象δf1和δf2关于MIi的规范关联度为

(5)计算优度
对象Zj关于各衡量指标MI1,MI2和MI3的规范关联度为
对象Zj的优度为

(6)选取优度较高方案
对δfj的优度进行比较,若

则对象δf0为较优,δf0便是控制器实际输出值。
优度评价方法如表2所示。
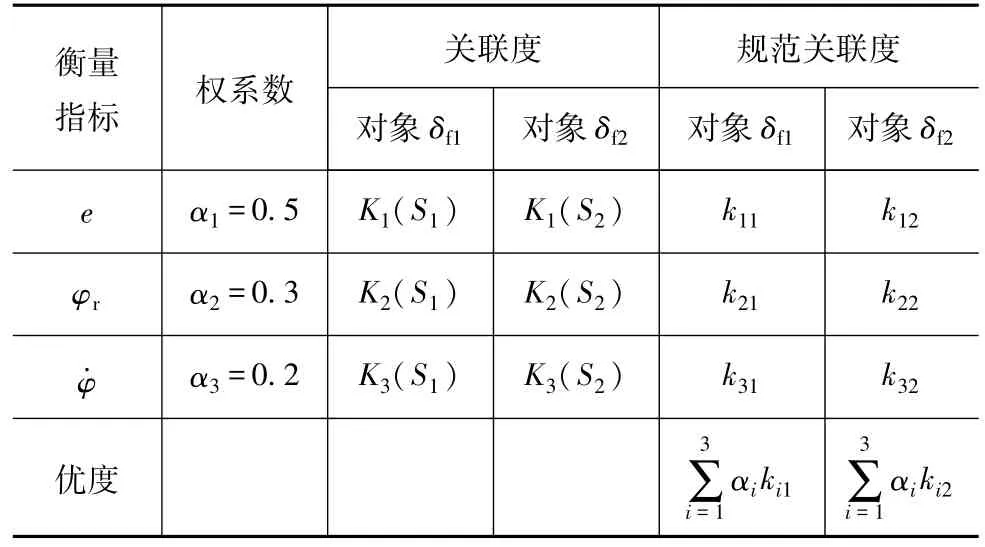
表2 优度评价方法
3 仿真结果
本文中基于MATLAB/Simulink-Carsim平台,搭建仿真系统模型,基于可拓优度评价横向轨迹跟踪控制仿真系统框架图如图5所示,仿真实验验证本文中提出的基于可拓优度评价横向轨迹跟踪控制方法的有效性和稳定性,工况为两次变道路径。仿真采用的整车参数如表3所示。
本文中选用的工况为两次变道工况,车辆速度为中高速状态vx=20 m/s,预瞄距离为15 m,为保证变道平顺性,期望轨迹曲率变化如图6所示,曲率ρ随时间变化结果,最大曲率为0.000 25 m-1,变道最大横向位移为4 m。该工况有效验证了本文中提出的可拓优度评价横向切换控制器在中高速工况下时变曲率道路跟踪控制稳定性和可靠性。
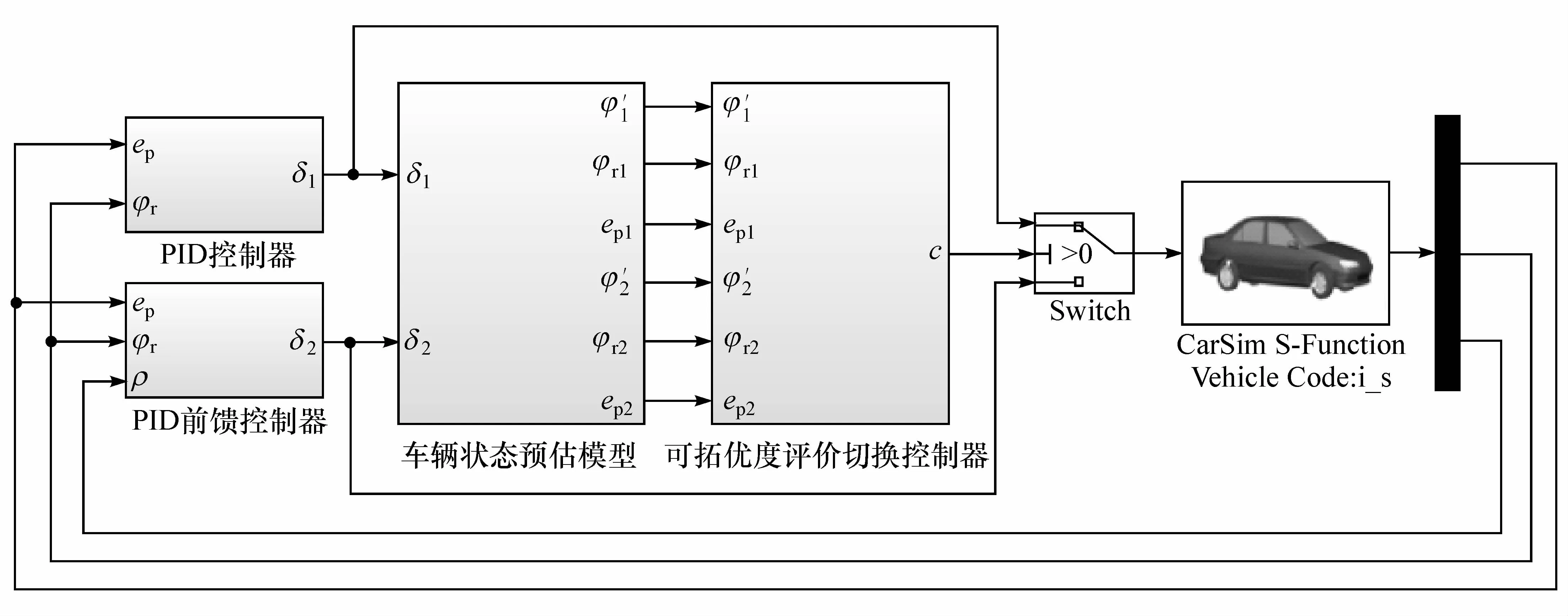
图5 基于可拓优度评价横向轨迹跟踪控制仿真系统框架图
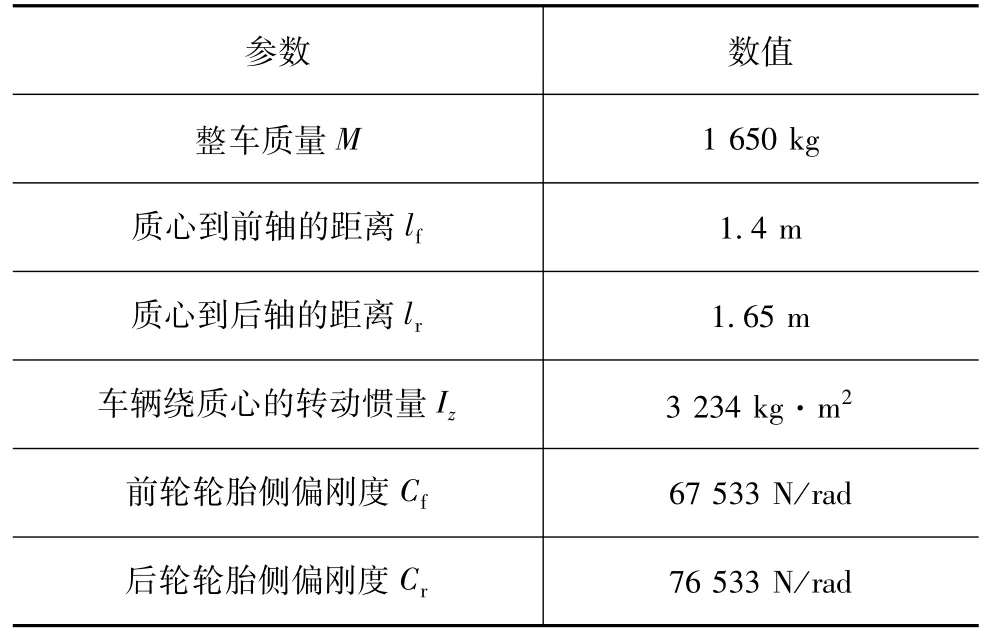
表3 整车参数

图6 目标轨迹曲率
轨迹跟踪结果如图7所示。可以看出,本文中提出的横向轨迹跟踪控制系统在此中高速工况下跟踪精度较好。车辆质心横向位置偏差如图8所示,横向位置偏差峰值由0.15下降到0.125 m,改善16.67%,车辆完成变道后,能快速收敛达到稳定状态。车辆航向偏差如图9所示,航向偏差峰值由0.007 5下降到0.006 6 rad,改善12%,车辆完成变道后,能快速收敛达到稳定状态。可拓优度评价控制器响应结果如图10所示,车辆直行时,控制器输出值均为大于0的稳态值,此时车辆-道路系统稳定,当车辆开始变道时,可拓优度评价函数向负值方向发展,路径跟踪逐渐向不稳定发展,此次车辆-道路系统控制难度增大,在车辆完成变道后,车辆-道路系统逐渐进入稳定状态,可拓优度评价函数的变化过程体现了整个控制过程中两控制器实时输出值的优劣程度。此外,车辆运动过程中横摆角速度和侧向速度如图11和图12所示,横摆角速度与侧向速度无明显波动,没有出现车辆控制过程中不稳定状态,整个控制过程车辆稳定性良好,两种控制器没有明显差别。
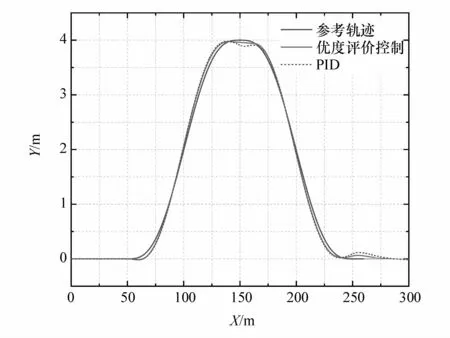
图7 车辆轨迹跟踪曲线
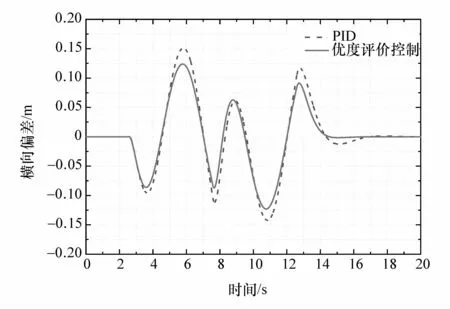
图8 车辆质心处横向位置偏差
根据两次变道工况在中高速工况下响应结果发现,本文中提出的可拓优度评价控制系统在中高速时变曲率道路具有较高的跟踪精度,控制系统可靠性强。
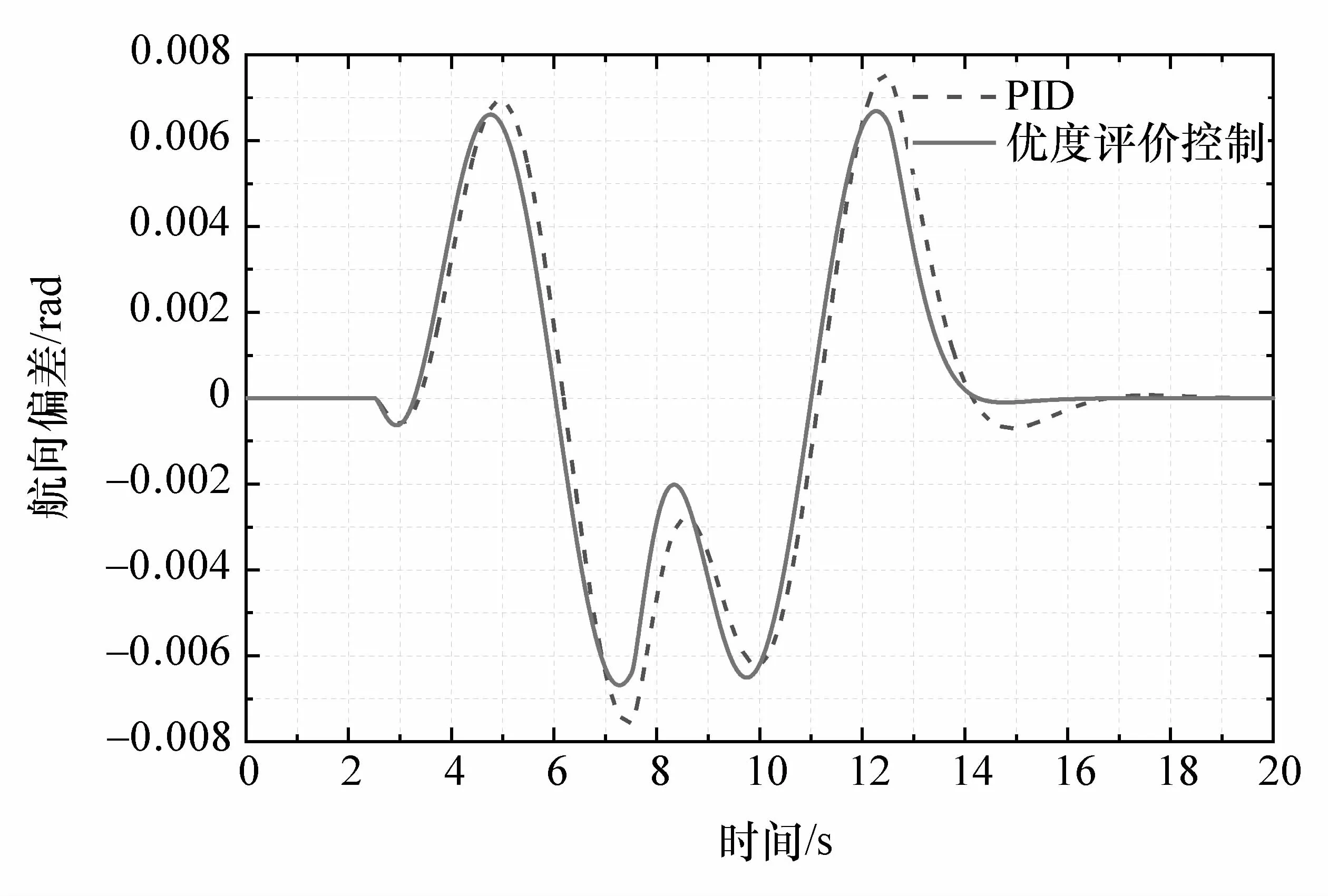
图9 车辆航向偏差
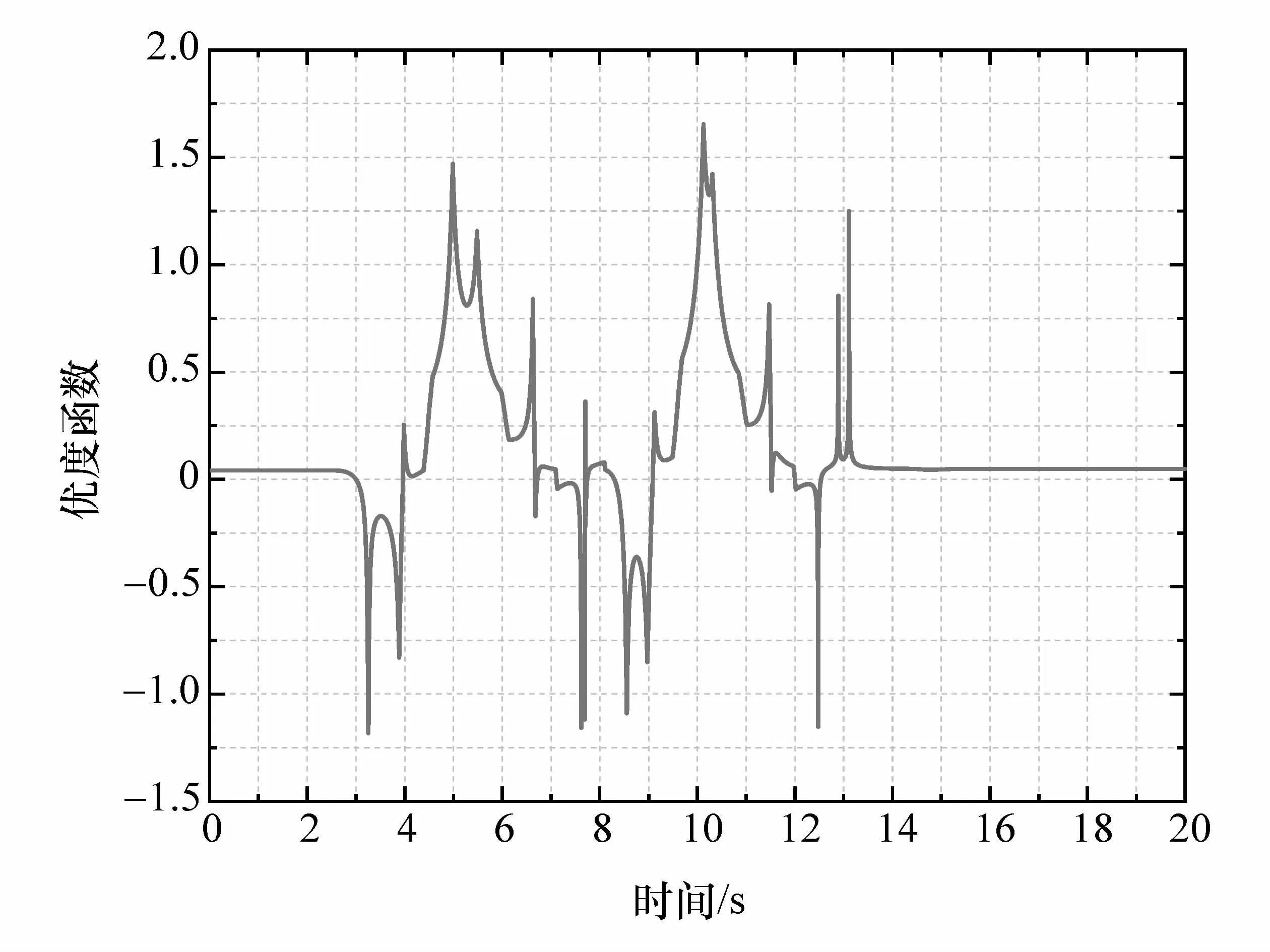
图10 优度评价函数之差
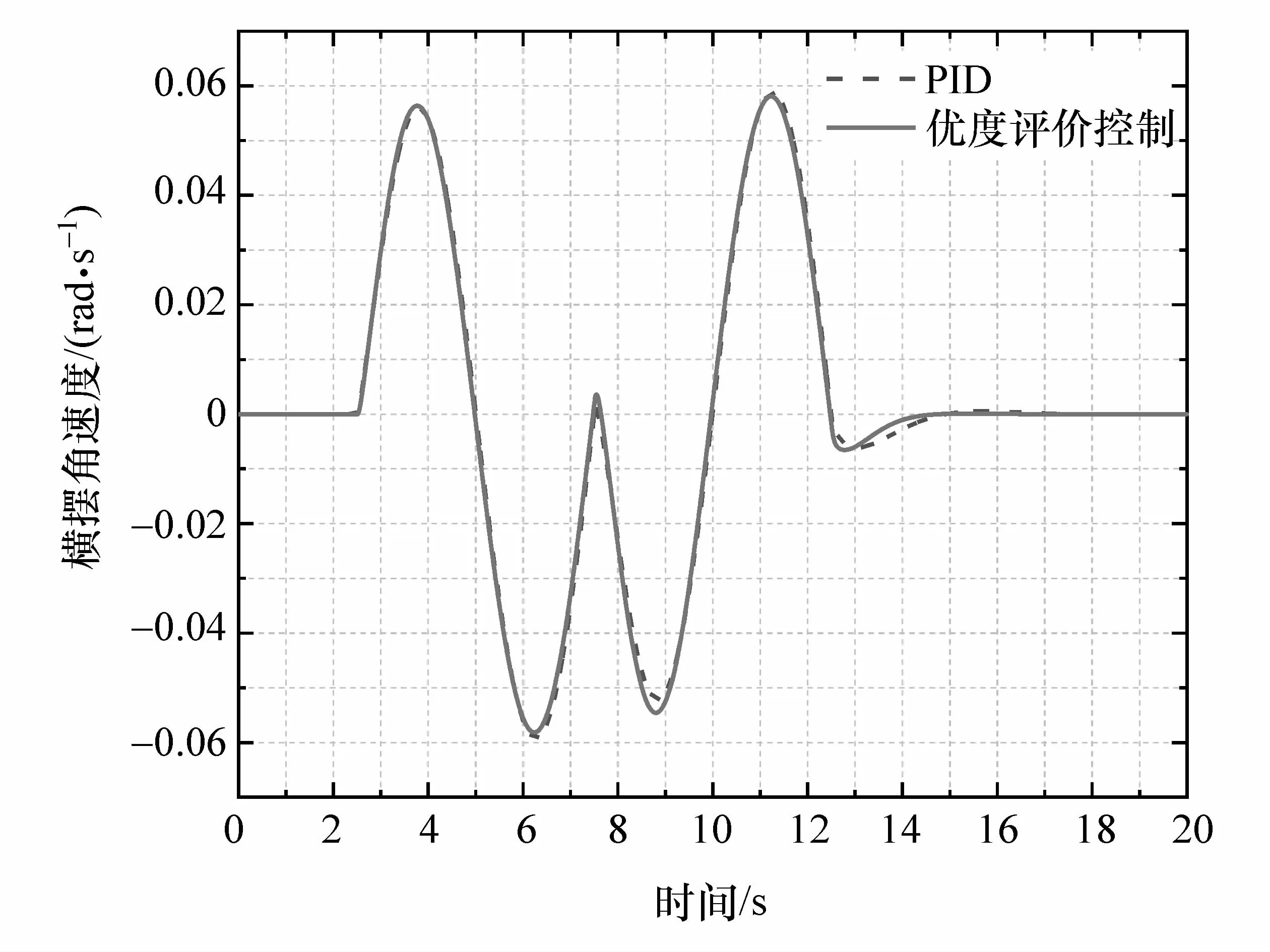
图11 车辆横摆角速度
4 结论
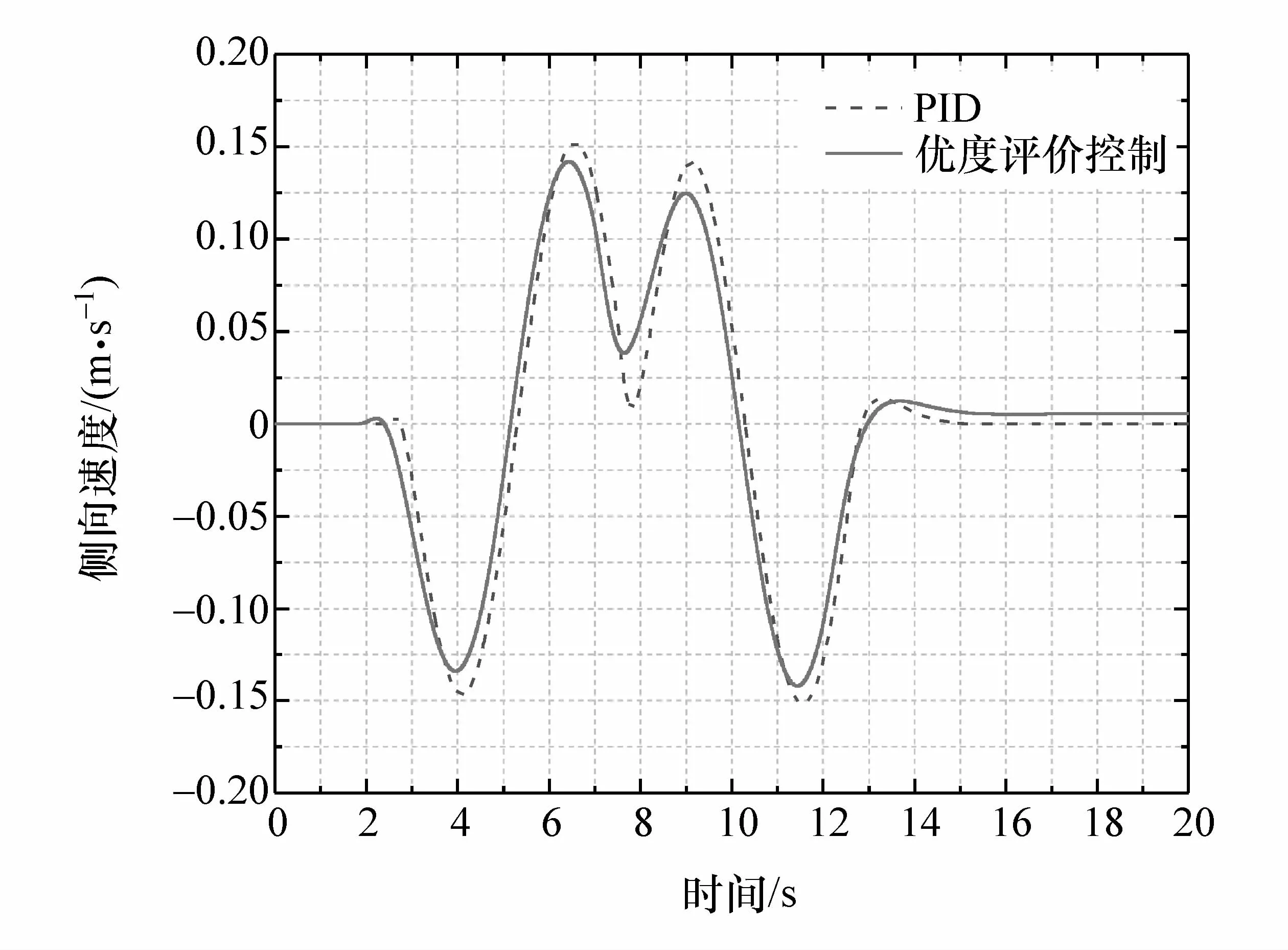
图12 车辆侧向速度
本文中提出了一种基于可拓优度评价的智能汽车横向轨迹跟踪控制方法,该方法解决了中高速、时变大曲率工况下横向控制精度低、稳定性可靠性差的问题,实现了智能汽车的横向轨迹跟踪控制。基于质心横向位置偏差、航向偏差和横摆角速度特征量建立可拓优度评价控制器,以控制器效果的优劣采用对应控制输出,实现了控制输出与车辆-道路系统稳定性的实时对应,从而保证了控制系统在较高精度范围内工作。从两次变道时变曲率工况下Simulink/Carsim响应结果可以验证,智能汽车横向轨迹跟踪控制过程中,轨迹跟踪精度高,车辆运动稳定性、平顺性好。
