基于公交优先的多路口车速引导控制方法
2019-10-28蔡雅苹王伟智
蔡雅苹, 王伟智
(福州大学土木工程学院, 福建 福州 350108)
0 引言
传统公交优先控制针对单一交叉口的控制效果显著, 却不能保证相邻交叉口畅通, 对干线相邻交叉口的影响较大[1]. 国内外已有较为成熟的理论成果来解决路口公交优先申请冲突, 建立了基于实时数据的公交优先控制方法, 通过调整信号配时, 延长绿灯时间、 缩短红灯时间和插入优先相位, 但这些方法对于多交叉口的公交优先并不理想. 干线公交优先考虑公交车辆整体的通行效益, 同时兼顾配时参数调整, 不破坏干线绿波带的前提下, 通过控制相位差协调干线上交通车流的运行. 公交信号优先是作为协调控制的一种补充和完善, 应以不破坏协调相位差为前提. 为提供公交车更多的优先机会, 王殿海等[2]提出保证相邻两个周期总时长不变的协调方法, 将上、 下周期富余绿灯时间用于本周期协调相位所需绿灯提前启亮、 延长, 但信号交叉口多相位公交申请冲突阻碍了公交优先的信号配时协同控制, 同时造成非公交相位上社会车辆延误增加. 马万经等[3]将可变速度引入公交优先控制, 提出最优的协调公交车辆运行速度与信号优先控制策略, 设计交叉口信号控制下公交车辆优先通行规则, 单个交叉口信号控制方法和最佳车速调整控制规则并不适用干线协调控制, 对相邻交叉口的通行产生负面影响. 当交叉口之间存在多个公交站点时, 公交车到站时间延误会制约干线协调控制效果, 导致交叉口整体运行效率降低, 难以实现公交车辆和社会车辆的协调控制.
本文明确公交专用道干线协调控制的目标, 提出可变车速引导控制方法, 建立实时干线协调控制下车速引导的公交优先模型. 以不破坏干线协调控制下的绿波带为前提, 预测公交车到达交叉口的信号状态, 利用交叉口间存在的公交站点, 对公交车进行精准车速引导, 确保干线协调控制下的主动优先控制效果, 同时解决公交多优先申请的冲突问题, 并实时检测公交车流量.
1 公交优先
1.1 公交优先策略分析

图1 公交优先策略分析Fig.1 Analysis of bus priority strategy
公交优先策略是为降低公交车辆的行程时间, 提高公交车辆的准点率, 减少城市道路交叉口的延误, 提高交叉口的通行效率. 传统的公交优先策略是公交优先信号控制, 通过控制交叉口信号灯, 为公交车辆提供优先通行权[4]. 信号协调控制交叉口群上下游交叉口受到的影响较大, 公交优先下的干线协调效果差. 图1所示, 传统信号优先策略与无控制下的效果相似. 传统公交优先存在产生无效优先的情况, 影响非优先相位. 车速引导策略通过车速变化, 调整行程时间, 适应交叉口信号配时, 实现多交叉口高效的公交优先[5].
1.2 双层在线优化模型
提出一种双层在线优化模型, 设计车路协同环境下公交优先干线协调优化控制方案, 流程如图2所示.
第一层: 干线协调信号配时调整. 公交专用道的公交车流量在早晚高峰时段突发变化调整多个交叉口公共周期、 绿信比、 优化相位差以适应交通环境的变化. 实时检测公交车流量变化, 优化多交叉口绿波控制.
第二层: 交叉口信号配时和公交车速引导集成. 该集成为公交车辆主动优先, 在多交叉口公交绿波协调控制下, 通过车辆与道路设施进行的双向通信, 确定各交叉口主干道相位绿灯启亮时刻. 依据相位差计算可实施引导区域, 结合公交车流量对多辆公交车进行速度引导, 调整公交车速以改变行程时间. 车路协同系统检测公交车流量变化, 通过交叉口信号配时优化和车速引导策略, 保障公交优先实施的可行性.
2 多交叉口协调优化
2.1 干线协调信号配时模块
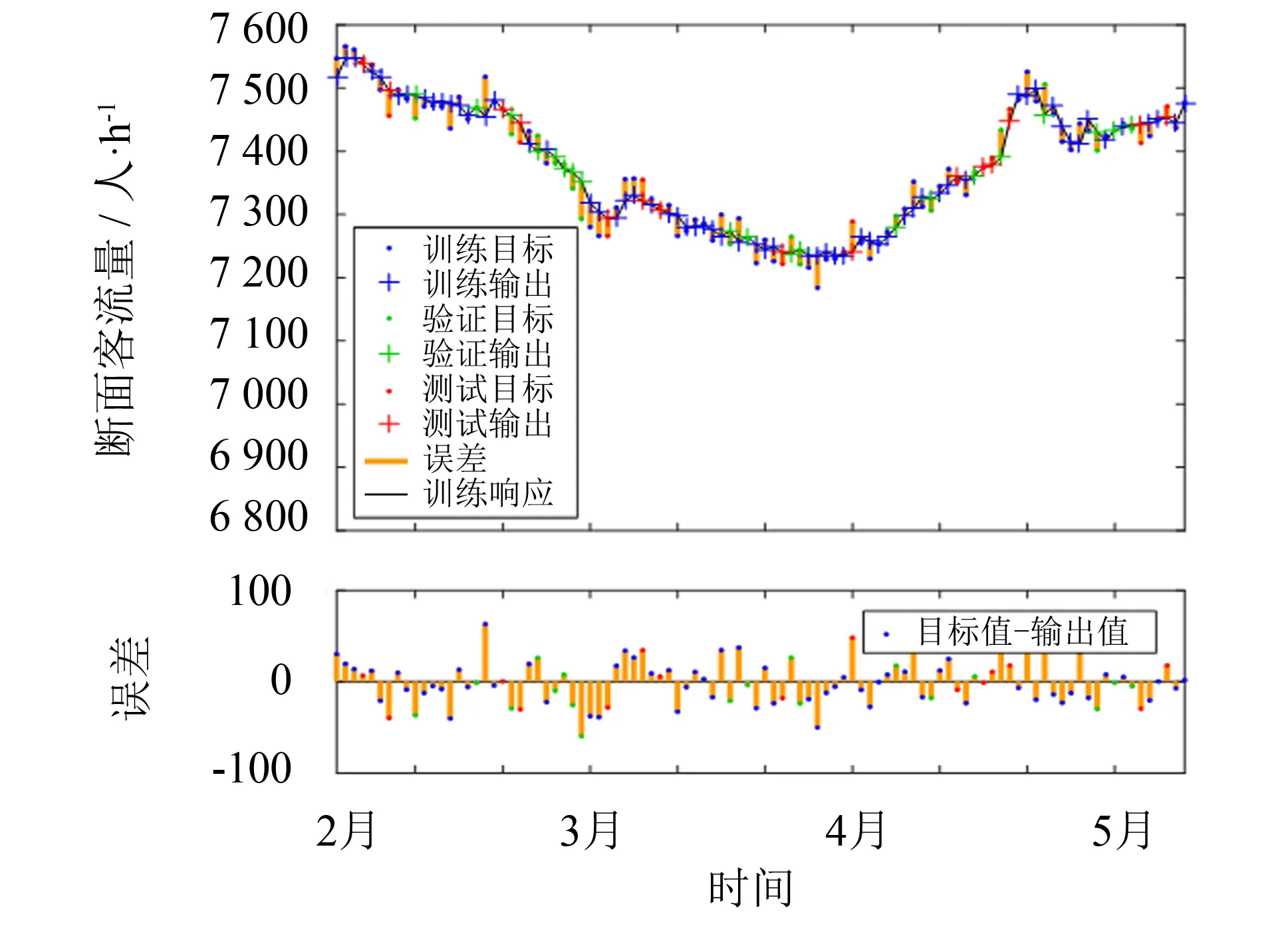
图3 神经网络高峰小时客流量预测Fig.3 Neural network passenger flow prediction
公交优先控制通过调查交叉口的公交车辆运行数据、 早晚高峰时期的交通流量, 对社会车流与公交车流进行客流量换算处理, 采用动态神经网络预测法预测研究区域的早高峰的客流量. 以1 h为数据采集周期, 为保证数据的可靠性, 以早高峰时期的100组数据进行神经网络的训练. 经过测试, 选择10层隐藏层、 Levenberg-Marquardt算法进行客流量的预测, 结果如图3所示. 利用预测结果进行公交排班调整和干线公交协调控制, 优化交叉口进行信号配时: 公共周期、 绿信比、 相位差. 采用韦伯斯特法确定各交叉口的最佳周期时长, 从中选取最大周期作为线控的公共周期. 绿信比的求解采取等饱和度原则分配, 为增加干线绿波带宽度, 压缩非主干道相位的绿灯时间, 采用饱和度0.9对应的绿灯时间, 剩余绿灯时间分配给主干道相位. 相位差是实现线控的关键参数, 采用以绿波带带宽最大化为优化目标的数解法求解相位差.
在线基础信号配时方案适用于公交车辆发车频率高、 公交车到达稳定、 可预测运行状况下的公交车流. 该方法运行状况的预测仅需要获得区域客运量历史数据, 在公交车流稳定的情况下, 控制效果较理想. 早晚高峰时期, 公交客运需求大, 绿波控制难以保证公交连续通过多个交叉口, 检测器检测到公交到达, 预测从上游路段到下游交叉口行程时间并判断是否与相位差相适应, 即
T=nOf(n=1, 2, 3, …)
(1)
式中:Of为相邻交叉口时差, s;T为预测相邻交叉口间的行程时间, s.
当T≠nOf, 不满足适应条件时启动车速引导控制条件判别, 在引导区域内, 能通过改变公交车速调整行程时间T, 使其等于相邻交叉口相位差或呈整数倍, 对其进行车速引导策略. 否则, 获取实时检测的公交车运行数据, 重新调整多交叉口绿波联控, 优化相位差, 改变公交到达交叉口状态.
2.2 车速引导控制流程
车辆引导策略的控制因素包括发车间隔、 车辆调度和速度引导. 干道上的公交车辆采用智能公交发车时刻, 根据历史需求数据、 干线公交车辆运行情况进行调度, 发车时间调整适应优化后协调控制方案. 根据路口各个相位绿灯启亮时刻, 计算引导区域, 结合路段公交车流量对多辆公交车辆进行速度引导, 达到公交优先的目的.
2.2.1引导车速控制
前提假设: 排班调度控制下, 公交车队数量不大于3辆, 公交车队发车间隔为交叉口周期的n倍; 设有公交专用道, 不考虑非主干道公交车辆的优先情况.
绿波控制后设置公交车可行驶车速区间为[v1,v2], 取干线协调联控的带速vm为公交车辆正常行驶速度. 设公交车在tA时经过检测点A, 检测点A与检测点间距离为SAB, 公交车以vm匀速行驶, 到达检测点B所需时间为tAB=SAB/vm, 站点乘客上下车等候时间为tS. 公交车辆在时刻tB=tA+tAB到达检测点B, 在路段AB间, 通过减、 加速所能改变的最大时间分别为[6]:

(2)

(3)

图4 公交车到达交叉口时刻示意图Fig.4 Schematic diagram of the time when the bus arrives
传统的公交优先控制多着重于优先车辆或者交叉口本身, 较少考虑交叉口之前存在公交站点情况, 提高公交优先实施效果, 引导控制公交车在绿灯时通过交叉口停车线[7]. 图4中,Tmax2≥t3-t2;Tmax1≥t5-t4. 根据公交车辆到达时刻与公交站点对以下情况进行讨论.
1) 公交车在站点完成乘客上下车后能在[t0,t1]之间到达交叉口停车线, 公交维持原速度vt=vm.
2) 公交车在站点完成乘客上下车后在[t1,t3]之间到达交叉口停车线, 需对公交车进行车速引导, 通过在到达公交车站前提高车速, 使得公交车能在t1前到达停车线. 加速后的车速为:

(4)
3) 公交车经过站点完成乘客上下车后在[t4,t5]之间到达交叉口停车线, 则需要在到达公交车站前进行车速引导, 通过减速, 使得公交车到达停车线时为下一周期绿灯启亮时刻. 速度为:

(5)
4) 上述情况2)若通过一次提速, 公交车不能在t1前到达停车线, 则需经过公交车站点后进行二次提速, 以达到t1时刻前到达停车线, 速度为:
(6)
5) 公交车经过站点完成乘客上下车后, 在[t3,t4]之间到达交叉口停车线, 需在到达公交车站前进行第一次减速引导, 引导速度为:

(7)
增加公交车站点乘客上下车时间, 利用红灯时间完成站点乘客上下车, 公交车于交叉口停车耗时转移到载客服务, 经过公交车站采取二次减速引导, 其速度为:

(8)
图4中, 预测车队在首个交叉口,Tmax2 2.2.2引导车速动力学参数求解 车速引导区域即公交车车速引导区, 根据第一层干线信号配时方案, 可确定公交车到达交叉口状态S1(t1,vt1). 若交叉口之间存在公交车停靠站, 需要考虑站前与站后两次车速引导. 车速引导后的速度状态为Sn, 则到达公交站前的状态为S1/2(t1/2,vt1/2), 到达交叉口状态为S1(t1,vt1). 实际道路多数存在公交停靠站, 以下对存在公交车停靠站, 公交引导车速vm的求解过程进行说明. 车辆在检测点A的状态为S0(t0,vt0), 在引导区完成从状态S0到Sn的转变. 1)引导区域长度. 在t01=t1-t0, 车辆引导加速行驶最大路程Lmax1为: (9) 车辆引导减速行驶的最大路程Lmax2为: (10) 如图5所示, 车速引导区公交车辆行驶长度对应的控制曲线应满足如下约束条件: 车速引导区域的长度Lm∈[Lmax2,Lmax1], 则速度控制曲线存在, 可以通过速度引导策略指引公交车加、 减速行驶, 否则通过第一层干线协调信号配时调整控制改变状态S1(t1,vt1), 进一步求解判断Lm范围. 2)车速引导下控制参数求解. 当Lm∈[Lmax2,Lmax1]时, 如图6所示对公交车辆进行车速引导控制, 其数学表达式为: (11) 图5 车速引导区速度控制曲线Fig.5 Speed curve in speed guidance area 公交车辆在该引导模式下的控制曲线积分L为: 仿真实验选取福州市金山大道部分路段, 如图7(a)所示为实际路况在Vissim中建立的路网. 考虑该相邻的3个交叉口作为仿真分析对象, 图7(b)显示交叉口距离、 信号相位与站点情况. 其中1号为关键交叉口, 干线联动控制后各个交叉口起始周期时长146 s. 仿真情景根据实际车流量调查情况设置无控制现状Ⅰ、 传统感应信号公交优先Ⅱ、 双层优化模型车速引导控制Ⅲ, 交通流变化设置为实际车流量的0.7、 1.3倍. 仿真时间段为该区域路段早高峰(7:00—9:00), 交叉口车流量如表1所示, 根据实际调查情况在Vissim中建立仿真交叉口模型, 对模型进行标定. 调查主干道上250辆车的速度, 期望车速在40~45 km·h-1的频率最高为26%, 城市道路设计车速较低, 高峰期车速范围变化不大, 因此将期望车速标定在40 km·h-1. 经过反复试验调整, 将换车道行为设为可以自由选择路线, 在任意车道任意行为下均可超车, 跟驰行为可以观察到的车辆数为10, 仿真持续时间为7 200 s, 仿真精度设置单位仿真秒的帧数为5帧. 图7 协调交叉口情况与信号相位Fig.7 Coordinate intersection status and signal phase 车道西进口道(pcu·h-1)左转直行右转东进口道(pcu·h-1)左转直行右转北进口道(pcu·h-1)左转直行右转南进口道(pcu·h-1)左转直行右转135315593001751500144168118128306141250216915351261941507140832007024943620032061272165124160710023321220010619985 图8 仿真模型标定结果Fig.8 Calibration result of simulation model 对仿真交通流量进行有效性检验, 首先将调查干道上游进口道交通流数据输入交叉口仿真模型中, 然后将初始配时方案输入对应交叉口配时信号机中, 仿真结束后输出给定时刻干道下游交叉口出口道仿真数据流量, 运用Spss软件分析给定时刻实际流量和通过仿真输出相应时刻的流量, 选定两者的趋势线的相关性系数进行评估. 图8表明实际交通流数据和仿真交通流数据不能完全吻合, 但是两者趋势接近, 相关性趋势函数为y=0.958 4x-43.319, 相关性系数R2为0.918, 表示两组数据之间差异较小, 具有显著相关性. 同时选取15组下游交叉口早高峰时刻的交通流量作为检验标准, 采用t-检验实测交通流量与仿真数据是否存在显著区别, 查t界值表, 在显著性水平为α=0.05水平下,t0.025(14)=2.144 8,T=0.437 8 双层优化模型考虑了实时调整干线交叉口之间的联动控制, 并根据客流量预测结果调整公交排班发车时间, 优化干线协调控制, 发车频率设置为干线协调绿波带交叉口周期的n倍. 选取123路、 158路、 173路、 41路、 96路五条公交线路. 公交专用道路出入口设置检测器, 检测公交车辆到站时间并根据交叉口相位情况, 判断双层优化模型启动条件, 采取可变车速引导及站点停靠时间调整. 实施车速引导策略仍无法连续通过多个交叉口, 启动第一层干线协调信号配时模块, 车速为绿波带速, 起始设置40 km·h-1, 车辆为最优行驶状态下, 通过50%的上下限调整车速, 约束车速范围20~60 km·h-1, 通过边界搜索确定可行加速度an、 引导速度vm组合. 以该方法作为理论基础进行Vissim实例仿真, 对仿真结果进行分析. 表2表明多路口三种控制情形的对比结果. 无控制现状下, 公交车辆的平均延误为113.7 s, 公交车辆行程时间为356.7 s. 传统感应信号优先控制下公交平均延误有所减少, 公交优先效果不理想, 公交行程时间优势较小. 采取双层优化模型下的引导策略, 进行车辆排班计划, 重新调整干线联动控制, 改善车速引导策略下公交优先效果, 公交车辆平均延误降低60.9%, 公交行程时间减少了110.4 s. 无控制现状、 传统感应信号优先以及可变车速引导下的三种公交行程时间分别为356.7、 318.6、 246.3 s, 如表3所示, 三种情形下, 可变车速引导策略的停车时间最短. 单位时间的公交车通过数次调控后, 更满足高峰时段的客流量需求. 表2 公交服务评价 表3 公交优先效益评价 双层优化模型下的干线协调联动控制有效地提高了断面客流量, 公交优先可变车速引导策略有效减少了公交车辆的延误, 提高了公交车辆的服务水平. 本文提出的协调优化方法可用于多路口公交优先智能控制, 适合发车频率高、 公交路网复杂的情况, 引导的车速求解方法简单快捷. 当公交需求较大, 路段长度和车速满足条件时, 通过调整发车频率及进行车速引导实现交叉口公交优先. 本文研究还存在不足, 缺少干线双向的协调优化, 没有考虑高峰时期站点乘客上下车延迟, 需要进一步讨论研究.







3 仿真实验分析



3.1 实验方案
3.2 仿真结果评价


4 结语
