压缩机防喘振智能控制系统的研究
2019-10-24高艳春
高艳春
摘 要:本文阐述了压缩机喘振机理以及喘振特性分析,为防喘振控制方法的改进提供了前提。将传统的PID控制与模糊控制相结合,应用MATLAB进行系统性能仿真。经过仿真结果可以看出模糊PID控制能够更好地适应压缩机系统变工况运行。
关键词:防喘振;PID控制;模糊控制
压缩机在运行过程中,当负荷降到一定程度时,压缩机气体流量和压力将按照一定的周期性变化,其变化频率比较低而振幅却比较大,压缩机的机身会振动的比较剧烈,并发出“哮喘”或吼叫声,这种现象就叫做“喘振”。压缩机喘振具有很大的危害性,一旦发生喘振,严重时会造成压缩机的轴承、密封、叶轮以及转子的损坏。有时压缩机虽然发生喘振现象,但对其并没有产生明显的损害,可是它会降低其工作效率和使用寿命。所以针对喘振对压缩机的不利影响及目前方法的局限性,对喘振控制系统的研究尤为重要。
一、压缩机防喘振机理及特性分析
(一)喘振机理的研究
压缩机工况的变化会引起压缩机的喘振、逆流、旋转失速等问题。目前关于压缩机的喘振机理的研究,还没有得出完整确切的结论。对于喘振现象的产生,通常情况下认为是由内因和外因两个因素造成的。从内部因素来讲,是因为在一定的条件下,压缩机内的气体发生旋转脱流;从外部因素来讲,与压缩机联合工作的网管容量和特性有关。
(二)压缩机喘振特性分析
压缩机正常运行时位于工作点处,其压力和流量取决于工作点的位置。大部分情况下,是否发生了喘振现象,可以通过流量的改变量进行判断,入口流量阀或出口流量阀的打开程度,及压缩机的停机都会改变流量的大小。控制系统通常情况下工作在稳定区域,此区域的位置在喘振点和最小流量点之间,这样可以避免工作点到达喘振点。
二、防喘振控制方案的研究
(一)防喘振控制系统
本控制系统在设计时主要应用控制回流量的方法。对于回流量的控制通过控制回流阀的开度来实现,从而预防压缩机发生喘振现象。在正常操作时,压缩机工作在安全模式下,在这种模式情况下回流阀是全关的状态。
(二)控制算法的研究
常规 PID控制具有算法简单、适应性强、鲁棒性好、计算量小等特点,而广泛应用于过程控制中。但是,对于那些数学模型复杂而且不够精确、存有非线性、强干扰特性的控制对象,很难达到预期的控制要求。而近年来随着科技的发展出的模糊控制,它最大优点是对其所控制对象不需要具有精确的数学模型。它对参数未知,存在滞后或随机干扰的系统有较好地控制效果。把传统的PID控制与模糊控制结合在一起应用,在控制系统中发挥其优越性,此种控制将会是一种实用而行之有效的控制方法。
(三)模糊自适应PID控制器的设计
模糊自适应PID控制器是利用模糊规则对PID参数进行修改而构成的。它以误差 e 和误差变化 ec 作为输入量,能够满足不同时刻的误差和误差变化对PID参数自适应要求。
PID 参数模糊自适应主要目的是确定PID的参数比例增益、积分增益、微分增益与 e 和 ec 之间的模糊关系,通过在运行中不断检测 e 和 ec ,并以 PID 參数的修正量(、、)为输出,以满足不同时刻偏差和偏差变化对 PID 参数整定的要求,从而使被控对象具有良好的动态和静态特性。
最终得到 PID 控制器的参数,、、,其中、、为预整定值。
三、仿真与结果分析
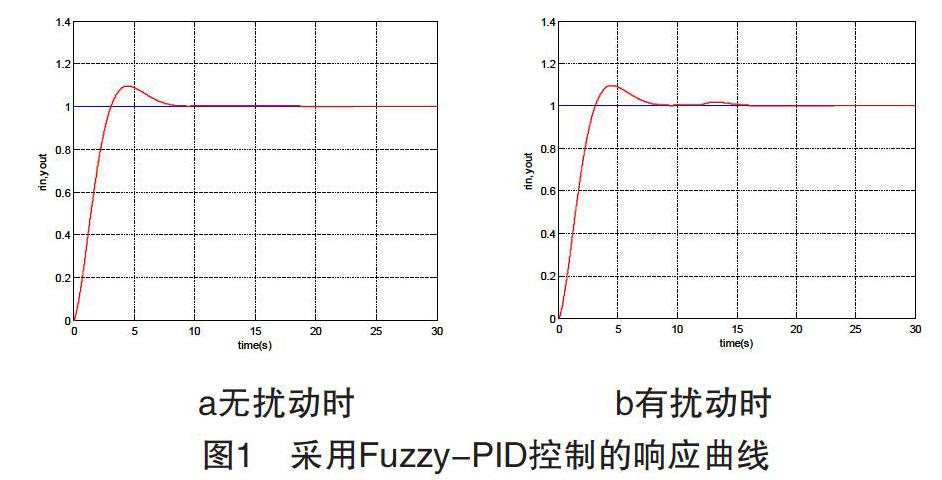
在MATLAB环境下进行仿真,采用三角形隶属函数,仿真结果如图1所示,其中a图对应着未加入扰动的响应曲线,b图对应加入扰动的响应曲线。
通过仿真曲线可以看出,采用三角形隶属函数的系统性能良好,同时计算量减少,编程得到很大的简化。Fuzzy-PID控制的动态过程缩短,抗扰动性能变好,超调量明显减小,能够很好的保证压缩机稳定地工作在设计工况点。
结论
把传统PID控制和模糊控制相结合进行应用,设计出合适的Fuzzy-PID控制器,这样的防喘振控制系统能够更好地适应压缩机系统变工况运行,有利于整个压缩机系统在工况区运行,值得工业应用与检验, 具有较高的工程实用价值。
参考文献
[1] 尹志宇.一种新型 Fuzzy-PID 控制器的研究[J].河北师范大学校报,2008(2):174-176.
[2] 李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998.
