一种新型四自由度的上肢康复机器人
2019-10-24张伟胜喻洪流黄小海魏文韬孟巧玲王多琎
张伟胜,喻洪流,黄小海,魏文韬,孟巧玲,王多琎
1.上海理工大学医疗器械与食品学院康复工程与技术研究所,上海市 200093;2.上海康复器械工程技术研究中心,上海市 200093;3.民政部神经功能信息与康复工程重点实验室,上海市 200093
《2017年中国卒中防治报告》指出,我国40 岁以上人群现患和曾患脑卒中人数为1242 万[1],脑卒中患者年轻化趋势明显,存活人群中70%留有不同程度的后遗症[2]。偏瘫是脑卒中患者最常见的后遗症,大多数偏瘫患者会出现上肢功能障碍,极大地影响患者的日常生活[3‑4]。现代康复理论与实践证明,科学合理的康复训练对于脑卒中偏瘫患者的康复治疗至关重要[5‑7]。传统的康复训练是在康复治疗师的帮助下,以一对一的方式徒手或者使用辅助器具引导患者完成大量的重复性动作,这种训练方式费时费力,效率低下,而且无法保证训练的强度,缺乏相应的评估参数,难以对康复训练进行分析优化[8‑9]。近年来,随着科学技术的不断发展及医工结合的不断加强,具有康复训练及评估功能的上肢康复机器人应运而生,并在脑卒中患者运动康复领域得到快速的发展和广泛的应用[10‑13]。
目前国内外已研制多款用于康复训练的上肢康复机器人,但研究发现大部分上肢康复机器人的设计都采用串联式结构,即将驱动电机及各种传动机构安装在距离执行装置较近的地方,如机器人的各个关节处[14‑16]。具有代表性的ARMin III由瑞士苏黎世大学研发,是一款可实现上肢各关节主/被动训练的六自由度上肢康复机器人。为了便于控制,该机器人在每个自由度上均安装有位置及6 维力矩传感器,使得整个机械臂结构复杂,体积庞大[17‑19]。安阳神方康复机器人有限公司研发的“灵动”上肢康复机器人是国内十分成熟的上肢康复机器人产品,该机器人能在三维空间里帮助患者完成主/被动模式下的单关节和多关节复合训练,对患者的训练效果显著。但与ARMin III类似,“灵动”机器人将电机直接安装于上肢各关节处使得机械臂庞大且笨重,同时电机运行时的噪声及辐射会使患者产生一定的不适感,影响训练效果[20‑21]。为了克服康复机器人设计中串联式结构的弊端,本研究提出一种将肩、肘关节驱动系统及信息检测系统集中放置在基座内的新型设计思路,并基于该设计思路完成样机的制作。
1 机械设计
1.1 总体结构设计
本研究中的上肢康复机器人将三个驱动肩、肘关节运动的电机布置于同一基座,通过同步带传动系统将三个电机的动力源互不干扰地平行传出,再通过主传动杆和弧齿锥齿轮等传动部件进行动力换向,最终将动力传输至肩、肘关节处,实现肩关节内收/外展功能及肩、肘关节屈曲/伸展功能。另外由于腕关节处的驱动电机较小,因此借鉴了外骨骼机器人将电机外置的优点,在机械臂末端设置微型动力系统实现腕关节屈曲/伸展功能,其机械结构简图如图1。这样的设计使得机械臂的体积和质量大大减小,布局更加紧凑,而且有效克服了电机直接安装在关节处产生的巨大噪声和辐射等问题。同时由于锥齿轮可以通过旋转实现360°内任意角度的垂直传递,所以可以通过旋转机械臂来实现左/右手互换训练,从而提高上肢康复机器人的使用效率,其样机实物如图2。
1.2 机械臂结构及安全性设计
机械臂主要包括肩杆、上臂杆、前臂杆和腕关节四个部分,考虑到上肢康复机器人的适用性要求,机器人尺寸需要严格对照人体参数进行设计。根据中国成年人人体尺寸国家标准(GB 10000‑1988),本研究中取机械臂肩杆长200 mm,上臂长385 mm,前臂长253 mm,腕关节康复训练机构长180 mm,其总体结构如图3。
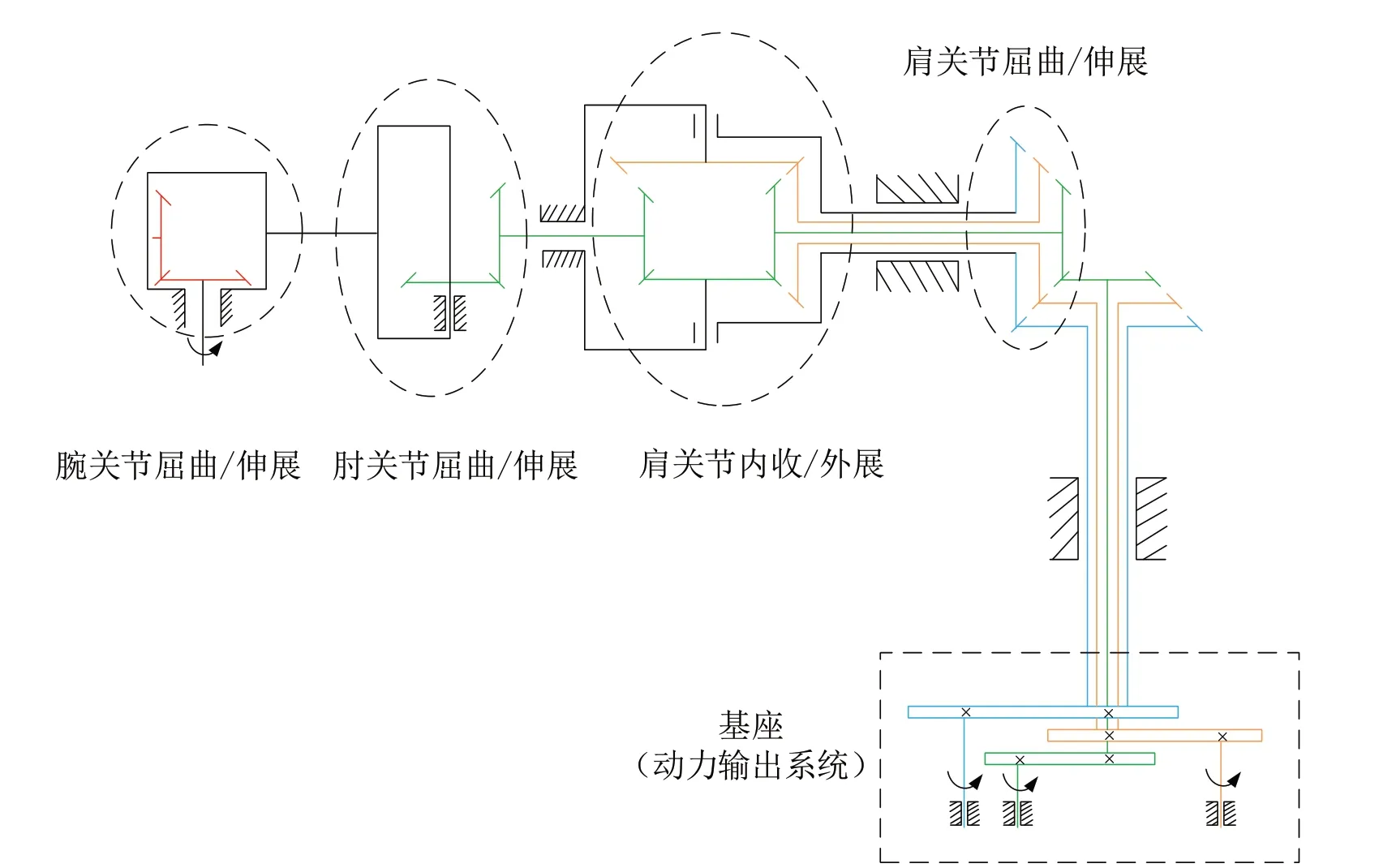
图1 上肢康复机器人机械结构简图

图2 上肢康复机器人样机
上肢康复机器人作为替代康复治疗师为患者进行康复训练的设备,为避免康复过程中对患者造成二次伤害,其安全性设计尤为重要[22‑23]。本研究中的上肢康复机器人分别从机械、硬件和软件三个方面对安全性进行设计。首先,在机械结构上,机械臂四个关节处分别设有卡槽,每个关节的活动范围如表1 所示,通过卡槽的形式将机械臂上肢的活动范围限制在安全的活动范围内,即在机械臂的极限位置设有限位,如图4。其次,系统的上电和断电过程分别设计有独立按钮并引入急停开关,防止紧急情况下的误触发操作,同时对机体进行安全接地。软件上设有最大运行角度、速度检查和电流过流保护等功能,全方位保证患者的安全。

表1 上肢康复机器人各自由度活动度
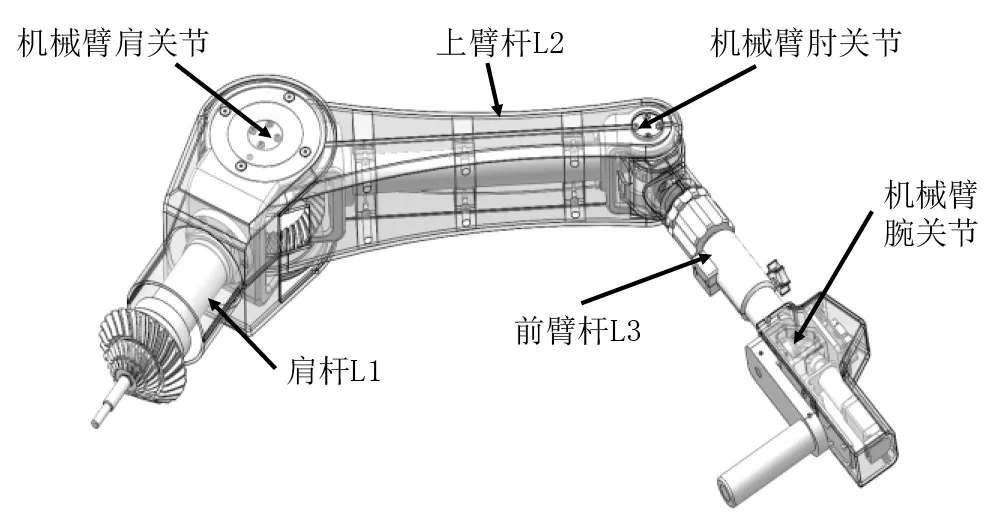
图3 机械臂总体结构

图4 机械臂各关节限位结构
1.3 动力系统参数设计
上肢康复机器人需要带动患者患肢完成一定量的重复性动作,因此其负载主要来源于机械臂自重及患者手臂的重量,其中机械臂自重可以在SolidWorks 中建好三维模型,然后添加材料由计算机计算得出:机械臂整体质量约为6.67 kg,肩杆质量约为2.62 kg,机械上臂约1.82 kg,机械前臂约1.27 kg。患者手臂质量根据我国成年人标准体重表和人体质量分布等数据可知,90%左右男性的上肢质量约≤3.55 kg,前臂及手的质量约≤1.75 kg,单手质量约≤0.64 kg。
在进行肩关节康复训练时,当上肢处于水平状态时,肩关节两个自由度运动所需力矩达到最大,因此,肩关节屈曲/伸展运动最大力矩为:

肩关节内收/外展运动最大力矩为:

由于同步带传动效率为0.98,弧齿锥齿轮传动效率为0.99,因此驱动肩关节屈曲/伸展运动的最小力矩为:

η1为肩关节屈曲/伸展传动效率
由于肩关节内收/外展传动机构在肩关节处有1∶2的传动比,因此驱动肩关节内收/外展运动的最小力矩为:

η2为肩关节内收/外展传动效率
同理可分别求得肘关节、腕关节自由度的动力参数,各自由度的动力参数计算结果如表2。

表2 上肢康复机器人各自由度动力参数
2 控制系统设计
上肢康复机器人控制系统的制定,直接影响康复训练效果。本文设计的上肢康复机器人的控制系统分为四个部分,包括主控系统、智能交互系统、图形用户界面系统和虚拟现实应用系统。主控系统作为上肢康复机器人控制的核心,协调各个系统工作;智能交互系统通过采集患者运动意图及运动指令,为上肢功能障碍患者提供不同的康复训练模式;图形用户界面系统用于信息呈现功能,具有不同应用模型;虚拟现实应用系统渲染日常生活场景,患者可以在虚拟场景中训练日常生活动作,从而提高患者参与康复训练的兴趣。控制系统整体结构如图5。
主控系统作为上肢康复机器人控制系统的核心,使用CAN 总线连接伺服力矩控制系统,利用CAN 通信协议对伺服电机的运行状态进行控制;通过模拟量采集的方式连接运动意图采集系统,对采集的模拟量信号进行解算得到患者的运动意图;通过转换芯片将USB 总线逻辑转换成UART 总线逻辑进行交互信息传递;此外,主控系统还以SPI总线方式连接语音控制模块,利用语音控制模块可以进行声音的人机交互及对上肢康复机器人的工作状态进行控制与提示。
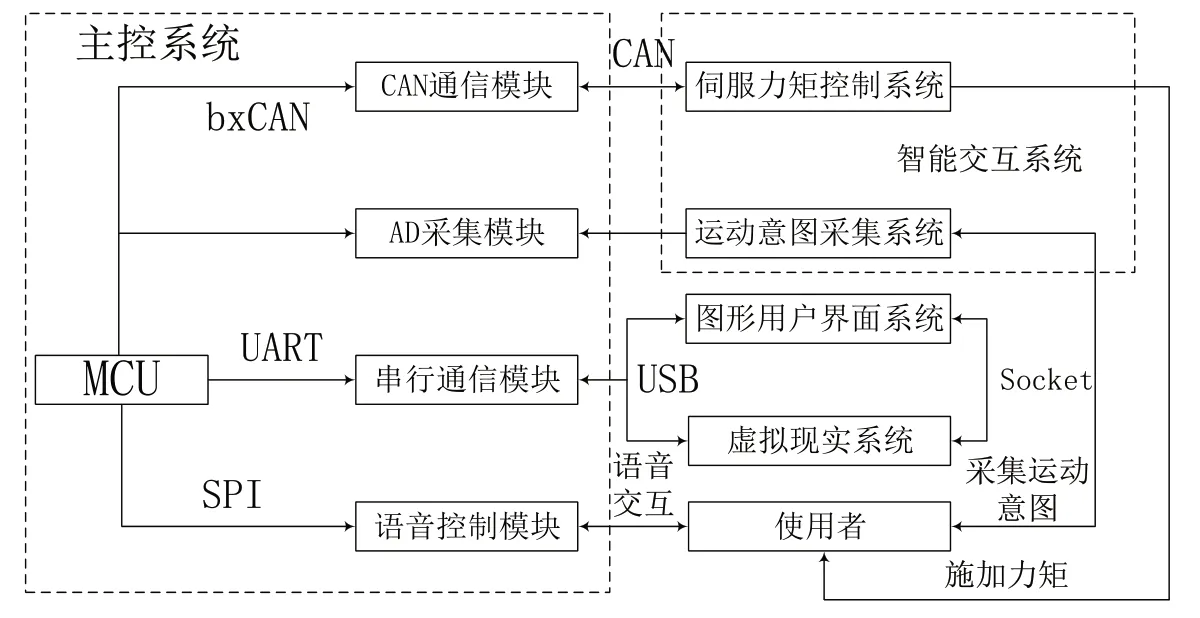
图5 控制系统结构
3 康复训练仿真与实验研究
3.1 康复运动轨迹规划
康复机器人通过带动患者患肢完成一定的重复性动作,实现康复训练的目的。为了使机器人能够完成特定的运动,本研究选用基于关节空间的三次多项式轨迹规划法,并运用MATLAB 中的Robotics Toolbox模块对上肢康复机器人进行轨迹规划[24‑26]。
上肢康复的目的是恢复患者的日常生活能力,因此选用康复过程中常用的取物动作和画四边形动作来进行轨迹规划。由于上肢康复机人的康复运动必须具有重复性,所以将康复运动轨迹分为6 个阶段,第1阶段为机器人机械臂末端手柄从原点位置运动到初始位置,其余5 个阶段为从初始位置回到初始位置的过程。为了得到设定的轨迹,本研究根据正常人在该机器上进行取物动作和画四边形动作,通过各关节角度传感器记录各关节的运动角度,计算得到三次多项式的系数,最终求得的轨迹规划方程组为角度关于时间的函数。根据得到的角度时间关系,在MATLAB 中绘制出各关节角度‑时间曲线,将角度时间关系分别代入正运动学方程,从而得到两种康复动作的轨迹,如图6。
3.2 实验研究
3.2.1单自由度运动控制实验
单关节被动训练实验主要是为了验证上肢康复机器人传动结构的合理性和各个关节单独运动的可行性。本研究通过上肢功能正常的实验者在实验样机上进行被动训练实验。设定肩关节屈曲/伸展角度为-60°~60°,肩关节内收/外展角度为-15°~70°,肘关节屈曲/伸展角度为0~60°,腕关节屈曲/伸展角度为-45°~45°,运动速度均设为3 r/min。测试结果显示,实验者在被动训练时各关节均能按照设定的速度达到设定的位置,且整个测试过程中,运动平滑稳定,无干涉情况,验证了此设计的传动合理性及各关节独立运动的可行性。见图7。
3.2.2多自由度轨迹规划实验
对于肌力较弱的患者在被动训练过程中,轨迹规划尤为重要。本研究将验证取物和画四边形两个动作的轨迹规划。验证流程见图8。
实验过程中,通过各驱动关节的绝对位置编码器实时采集各关节运动角度数据,通过串口将实验数据从嵌入式主控系统传输至PC 端,由于这两个动作均需要肩、肘关节进行运动,因此将得到三个关节的角位移信息。根据得到的实验数据,运用正运动学方程,计算得到机械臂末端手柄的实际运动轨迹。然后,在MATLAB 中完成对理论数据和实验数据的分析比较,进而验证轨迹规划动作的可行性。取物和画四边形动作的实验数据和理论数据对比分析如图9 和图10,可以看出机械臂末端实际轨迹与规划的轨迹基本相同,且运动轨迹曲线平滑,说明整个过程中康复机器人的运动速度平稳缓慢,适合脑卒中患者的康复训练,从而验证了取物和画四边形两个动作轨迹规划的可行性。

图6 取物、绘制四边形动作角度-时间曲线和机械臂末端轨迹

图7 肩、肘、腕关节单自由度运动控制实验
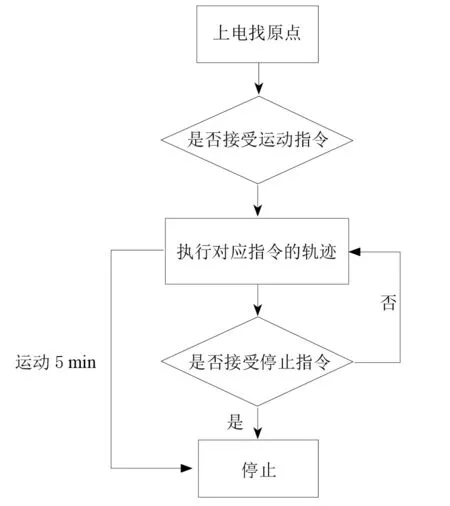
图8 轨迹规划验证流程
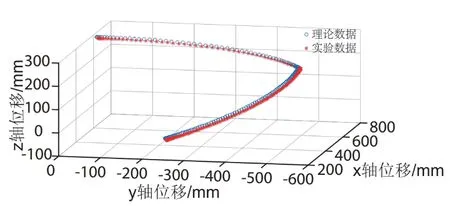
图9 取物动作理论-实验轨迹曲线对比图

图10 绘制四边形动作理论-实验轨迹曲线对比
4 讨论
本研究基于目前上肢康复机器人的研究现状,提出并设计了一种新型四自由度上肢康复机器人,克服了现有串联式上肢康复机器人机械臂体积庞大,直驱电机噪声、辐射大等缺点。并通过单自由度运动控制实验、多自由度轨迹规划实验验证了此设计的传动合理性及主、被动康复训练的可行性,为上肢康复机器人的研究提供了一种新思路和新方法。但上肢康复机器人的控制算法仍需要进一步优化设计,后续研究需要同时考虑惯性力矩、离心力矩等非线性力矩,利用控制算法,提高系统的鲁棒性和控制准确性。另外应充分利用伺服电机的功能增加和完善阻抗训练、等张训练、等长训练等功能。
