红外成像制导半实物仿真技术研究
2019-10-24周莉莉李海凤佟佳慧孔文华
周莉莉,李海凤,佟佳慧,2,孔文华
(1.北京机电工程研究所,北京 100074;2.复杂系统控制与智能协同技术重点实验室,北京 100074)
0 引言
光学成像制导技术是由飞行器上的光学成像探测器利用目标区反射或辐射的可见光或红外信号,完成对目标区域的成像,通过人在回路或自动目标识别等方式搜索、截获、跟踪目标,导引飞行器侦察、打击、命中目标的制导技术。光学成像制导技术已在各类武器系统中得到了广泛应用[1]。其中,红外成像制导技术由于具有全天时、精度高、抗干扰能力强、隐蔽性好、效费比高等优点,已经成为制导技术的主要发展方向之一。
为充分考核和优化试验室条件下红外成像制导系统的性能,需要构建半实物仿真试验系统,建立贴近真实的模拟环境,闭环迭代开展动态试验,完成对红外成像制导系统工作流程及其性能的验证。
1 飞行器制导控制系统工作过程
飞行器的控制是指使飞行器按照预定或指定的规律运动,其控制回路闭合流程如图1所示。飞行器接收来自基准装置或参考装置以及成像系统的导引信息控制导弹运动,其运动姿态与质心运动航迹等参数经控制系统的测量装置获取后,与输入进行比较,按所得误差及其处理信息进一步控制飞行器机体运动,直至满足控制精度要求为止。
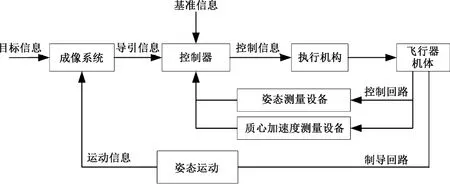
图1 制导控制系统组成示意图Fig.1 Schematic diagram of the guidance and control system
飞行器的制导是指建立飞行器运动与目标运动(目标所在的位置信息)的相互关系,由导引系统完成对目标运动或位置的搜索、识别、捕获和跟踪,并给出飞行器相对目标的运动信息,经过控制系统形成相应的控制指令,操纵飞行器趋近目标。
2 典型的红外成像制导仿真系统
红外成像制导半实物仿真系统主要为红外成像系统提供接近真实的模拟环境,使其在试验室的工作过程与在飞行器上工作过程一致,从而实现对成像、搜索、捕获、识别、跟踪目标能力及其性能的检验。按图1所示,仿真系统需实现的主要功能包括飞行器姿态运动的实时模拟、目标区场景模拟以及成像系统与目标之间的相对视线角运动模拟、飞行器运动学动力学模型计算等。以下介绍2种典型的红外成像制导仿真系统工作原理。
2.1 基于五轴仿真转台的红外成像仿真系统
基于五轴仿真转台的红外成像仿真系统主要组成包括仿真机、五轴转台、图像生成计算机、目标模拟器以及实时仿真网络等[2-3],如图2所示。
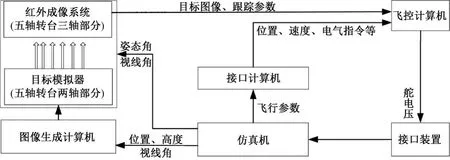
图2 基于五轴仿真转台的红外成像仿真系统组成示意图Fig.2 Schematic diagram of IR imaging simulation system based on five axis movement simulator
仿真机用于实时解算飞行器运动学、动力学模型,输出飞行器和目标的各种参数数据,实时控制仿真系统运行。
五轴转台接收仿真机实时解算飞行器的姿态角和视线角数据。其中:三轴部分安装红外成像系统,实现飞行器运动过程中俯仰角、滚转角、航向角3个姿态角变化的模拟;两轴部分安装目标模拟器,实现飞行器与目标相对运动过程中的视线方位角和视线高低角变化的模拟。
图像生成计算机根据目标区的场景特征、飞行器位置/高度信息、红外成像系统视线角等信息,实时生成具有足够分辨率和对比度的目标场景动态图像,并以视频信号形式输出给目标模拟器。
目标模拟器主要由动态红外图像转换和光学投影系统两部分组成,其作用是将图像生成计算机生成的目标区场景信息的视频信号转换为红外波段的信号,经过光学投影系统投射到成像系统入瞳处[4-5]。
实时仿真网络主要由光纤反射内存卡、HUB、光纤等组成,用于实现仿真系统设备间的实时高速通讯。
2.2 基于六自由度运动系统的红外成像仿真系统
基于六自由度运动系统的红外成像仿真系统主要包括实时仿真计算机、六自由度运动系统、目标区场景沙盘以及实时仿真网络等,其系统组成如图3所示。
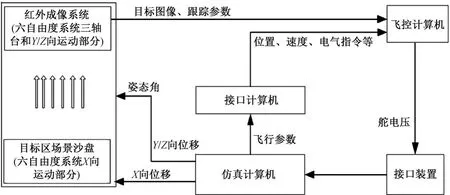
图3 基于六自由度运动系统的红外成像仿真系统组成示意图Fig.3 Schematic diagram of IR imaging simulation system based on the six-freedom-degree movement system
六自由度运动系统通常由三轴转台和3个线位移运动机构组成。三轴转台用于安装红外成像系统,模拟飞行器飞行过程中的姿态角变化。线位移运动机构模拟飞行器质心运动的X,Y,Z三个方向的线位移变化,通常在X方向运动机构上安装有目标区场景的红外沙盘模型,为成像系统提供红外场景模拟。
目标区场景沙盘包括各类典型的红外目标模型,以及用于模拟不同目标辐射温度的加温装置等。
以上2种方法均可为红外成像制导系统提供与真实工作过程一致的仿真环境,主要差异体现在以下几个方面:
1)基于五轴转台的方案中两轴运动位置与目标区场景模拟之间存在同步误差,而基于六自由度的运动系统方案不存在这个问题。
2)基于五轴转台的方案中如果两轴部分运动关系与视线角坐标系定义不一致,则需要进行坐标变换,由此可能带来目标场景模拟器图像产生像旋,需要在仿真过程中予以补偿,而六自由度运动系统不存在这个问题。
3)基于五轴转台的方案系统规模紧凑,直接模拟视线角,精度较高,使用方便;而六自由度运动系统方案的规模较大,线位移是通过缩比实现的,间接模拟视线角,精度与基于五轴转台的方案相比略低。
4)基于五轴转台的方案目标区场景模拟通过图像生成计算机、红外目标模拟器等实现,场景易于更换;而六自由度运动系统方案是通过目标区沙盘模型等实现,更换的成本较高,但模拟的目标区特性比采用目标模拟器输出的特性更真实。
从系统复杂程度、建设成本、灵活使用等方面进行综合权衡,目前国内基于五轴转台的成像制导仿真系统较多。
3 红外成像制导仿真技术发展趋势及仿真需求分析
为适应未来复杂战场环境作战、侦察打击目标多样化的需求,红外成像制导技术将向多维度、高分辨率探测、智能化、网络化和低成本方向发展[6]。
1)由单波段单谱段向多波段多谱段发展
随着干扰技术的快速发展,人工干扰和伪装技术的发展使得单波段红外探测器的探测和识别能力下降,复杂战场环境下适应性不够,导致命中精度降低。因此,结合目标、干扰等不同材质在不同波段呈现出较明显的特征差异,采用双波段或多谱段探测器件获取二维空间图像信息的同时,获得了光谱信息不同波段信息,提供更丰富更精确的目标区信息,能够提升对各种人工干扰的鉴别能力[7]。
2)由集中式获取信息向分布式获取信息方向发展
为了实现物美价廉的精确制导系统,正在大力发展具有可承受成本的高端红外成像探测器技术、高性能非制冷红外探测器技术、低成本捷联导引头技术。通过将多个低成本探测器或高端低端混合探测器获取的信息进行共享等方式可提高整体效能,降低单个成本[8]。此外,通过分布式探测模式,可以快速获取大范围的复杂战场场景信息,利用多信息融合处理技术,提取出典型目标的信息,再分发给不同的成像制导系统进行识别、跟踪等,进一步提升复杂环境下的飞行器性能。
3)红外成像制导技术与人工智能技术实现深度融合
随人工智能技术、计算机技术等快速发展,飞行器基于红外成像系统获得图像信息,并综合利用其他传感器和接收的外部信息及目标特征数据,通过飞行器信息处理系统中的深度学习算法等,实现在各种使用环境下的自动探测、自动分类、自动识别、自动捕获和跟踪,并且自主判断与决策[9]。这对于各类飞行器适应复杂多变的战场环境,提升性能和效能具有重要意义。
以上发展趋势给系统仿真带来了诸多新的需求,主要包括:
1)目标区多波段多谱段场景的模拟
不同材料组成的物体表现出的光谱信息不同,在红外不同波段辐射的温度也不同。因此,为了验证多波段多谱段红外成像系统的探测能力,以及丰富的信息提取能力等,需要在内场仿真试验室建立近似真实的目标区多波段多谱段场景,反映出目标区各类物体的固有属性。
2)面向博弈对抗的复杂仿真场景模拟
针对红外成像制导系统的人为干扰主要有三类:烟幕干扰、红外诱饵干扰、激光致眩干扰。烟幕干扰是人工产生的起遮蔽作用的气溶胶。这些气溶胶对不同波段的光学信号有较强的衰减作用,从而降低了红外图像的对比度,降低目标被红外成像系统探测到的可能性。红外诱饵干扰具有与被保护目标相似的红外特征,用以欺骗或诱惑敌方红外制导系统的干扰。红外诱饵干扰分为点辐射型和面源红外诱饵。面源红外诱饵可以模拟真实目标的红外辐射特征甚至目标的运动特性,从而使红外成像制导系统无法识别出目标,或者影响跟踪点的位置,导致无法正确跟踪目标。激光致眩干扰是利用辐射的激光能量消弱敌方光电探测和成像制导系统正常工作能力的一种光电干扰。为了检验红外成像系统的复杂环境适应性和各种智能算法的性能等,需生成带各类干扰对抗场景的仿真环境,开展大量的仿真试验验证。
3)分布式协同制导的实时仿真环境构建
针对分布式探测的发展趋势,需要建立覆盖分布式探测范围的大场景,确保各探测器在同一场景下工作,探测到的同一目标区的同一个目标,识别出的特征、位置信息等是一致的,从而验证分布式探测相关技术。
4 成像制导仿真需要解决的主要关键技术
现有红外成像制导仿真系统大多针对单一飞行器、单一体制、单谱段进行仿真验证,无法满足上述需求,需要开展相关的仿真技术研究。
1)成像制导仿真总体技术
剖析成像制导系统在复杂对抗环境中的工作流程以及其红外探测器件的工作原理,明确仿真验证内容,分析仿真需求,开展成像仿真新方法研究。综合考虑现有技术基础、系统建设成本、可行性等因素,开展成像制导仿真系统总体方案设计,综合评估功能、成本、可行性后,确定仿真系统建设方案、关键设备组成、指标分解等,完成总体设计。
2)多波段多谱段目标区大范围场景快速建模技术
针对探测区域的各类目标、干扰、背景等特点,研究具有多波段多谱段场景建模方法和验模方法,建立高精度的场景图像[10]。同时,针对探测制导等多功能一体化,分布式协同探测等需求,需要开展几十或上百公里的各类复杂地物背景的快速且精细化建模技术研究、大范围光学场景生成技术研究、光学仿真场景一致性控制技术研究等,实现快速建立大范围的复杂战场环境下的目标区场景模型。
3)目标区场景多波段多谱段生成技术
目前单波段的目标模拟器技术较为成熟,但多波段多谱段目标模拟技术,以及多波段多谱段信号实时合成技术等,还没有取得完全突破,距离工程应用还有一定差距,因此需要深入研究,实现真实自然环境下同一目标场景的多特征信号的仿真。
4)博弈对抗环境下以及协同探测制导体制下的试验设计与仿真评估技术
目前使用较多的试验设计方法包括正交试验设计、均匀试验设计、全面试验设计等。但针对博弈对抗环境下和分布式协同探测制导体制下的试验设计以及红外成像系统性能评估,不再局限于检验单一外红探测器件或某一算法的性能,而是全系统多项性能需求的统筹考虑。需要研究设计什么样的试验内容、试验条件,才能全面充分地检验实际成像系统的性能;研究采取哪些评估技术能客观评价单项的技术改进和综合的技术改进,以及对提升成像制导系统复杂环境适应性的贡献度等。
5 结论
为进一步提升红外成像制导飞行器的复杂环境适应性,成像制导技术近年来得到快速发展。为支撑新成像制导技术的突破及有效性检验,需要同步开展仿真关键技术攻关,支撑在内场构建贴近实战、灵活设置、重复使用的半实物仿真试验环境,开展大量的飞行全流程、全过程、全系统级干扰及对抗试验,从而检验制导控制系统部件乃至全系统的性能,确定性能边界并获得超出设计条件的使用效果底数,以确定真实任务背景下的成像制导技术使用方案等。