基于EXCEL的某轻型客车前悬架K特性分析
2019-10-24刘鹏坤李明安
刘鹏坤, 李明安
(潍柴动力股份有限公司 上海研发中心客车所, 上海 201114)
汽车的操纵稳定性是汽车安全行驶的主要性能,是“车辆高速行驶的生命线”[1]。而悬架是操纵稳定性的灵魂,故悬架K/C特性的研究对于提高整车性能至关重要。通过EXCEL对前悬架运动建模分析可直观了解前悬架运动状况及K特性,且可节省通过ADAMS/Car多体运动学分析软件进行分析的时间。
1 前悬架结构及运动学模型建立

1—转向机; 2—副车架; 3—转向拉杆; 4—下摆臂;5—减振器; 6—转向节。图1 横置板簧式麦弗逊前悬架
以图1所示的横置板簧式麦弗逊前悬架的结构型式为例进行研究。图中下摆臂4内侧通过螺栓与副车架2铰接在一起,下摆臂4外侧与转向节6下部通过球销相连,转向节6上部与滑动立柱固定,并沿减振器5的活塞杆上下滑动。转向拉杆3外侧与转向节6通过球销相连,内侧与转向机1通过球销相连[2]。
依据图1前悬架结构形式,建立如图2所示的前悬架刚体运动学模型。

A—减振器上点; B—减振器下点; C—下摆臂外点;D、E—下摆臂旋转轴线端点; F—转向拉杆外球销点;G—转向拉杆内球销点; H—车轮中心点;K—车轮轴线内点; I—转向机轴线内点; L—车轮接地点。图2 麦弗逊前悬架刚体运动学模型
下摆臂CDE沿轴线DE上下摆动,转向拉杆内点G沿着转向机轴线IG左右运动,转向节BCF沿着轴线AB进行上下滑动。点A、C、F、G均为球销连接。假设车轮为刚性,H、K、L固结在转向节BCF上。AC为虚拟主销轴线[3-4]。
2 前悬架K特性分析及验证
2.1 输入数据
首先确定各个关键点在整车坐标系中的初始坐标位置及整车参数。某轻型客车整车参数为:车辆轴距3 665 mm,前轴轮距1 710 mm;轮胎自由半径376 mm,静力半径347 mm。前悬架关键位置点见表1。
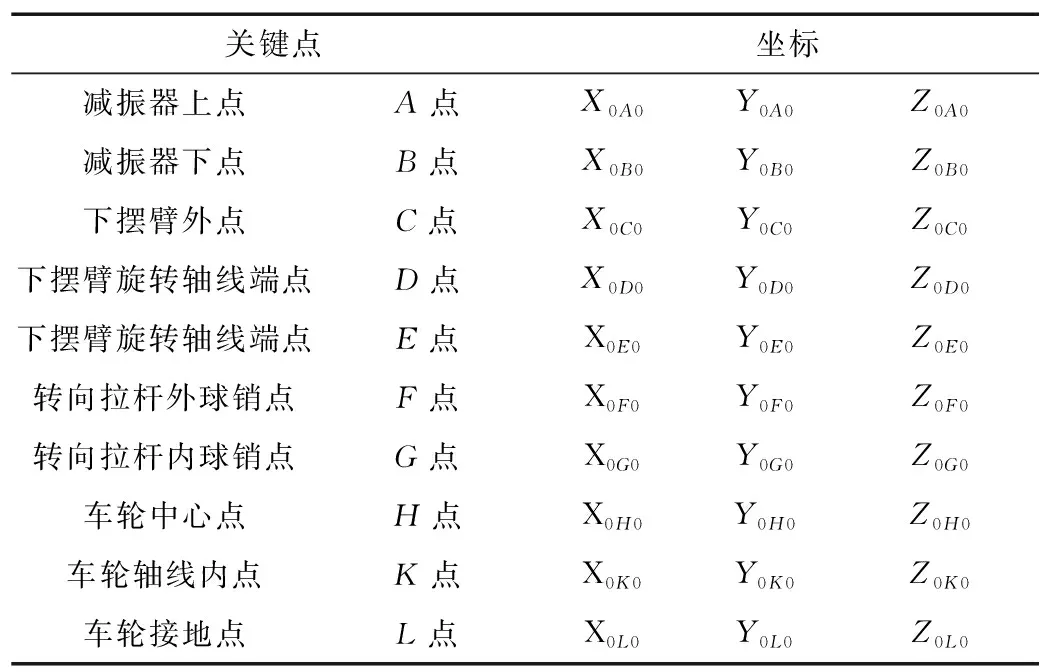
表1 关键点坐标 mm
2.2 坐标转换
2.2.1C点整车坐标
整车坐标系X0Y0Y0符合右手定则,原点在整车纵向平面上,X正方向指向后侧,Y正方向指向车右侧,Z正方向垂直向上。假设外摆臂旋转θ角,M点为C点到旋转轴线DE的垂足,则C点坐标为:
X0Cθ=X0M
Y0Cθ=Y0M-LC-DE·cos(θ0-θ)
Z0Cθ=Z0M-LC-DE·sin(θ0-θ)
式中:LC-DE为C点到旋转轴线DE的距离。
则主销内倾角α为:
αθ=arctan [(Y0A0-Y0Cθ)/(Z0A0-Z0Cθ)]
(1)
主销外倾角τ为:
τθ=arctan[(X0A0-X0Cθ)/(Z0A0-Z0Cθ)]
(2)
2.2.2F点整车坐标
图3为A点主销坐标系及其变换角度。坐标系X1Y1Z1原点在A点,平行于整车坐标系X0Y0Z0,A点整车坐标为(X0A,Y0A,Z0A),坐标系X2Y2Z2由坐标系X1Y1Z1绕X1轴旋转α角得到,主销坐标系XAYAZA由坐标系X2Y2Z2绕Y2轴旋转β角得到。则主销坐标系XAYAZA与整车坐标系转换矩阵为:
[X0Y0Z01]=[XAYAZA1]T1
(3)
式中:
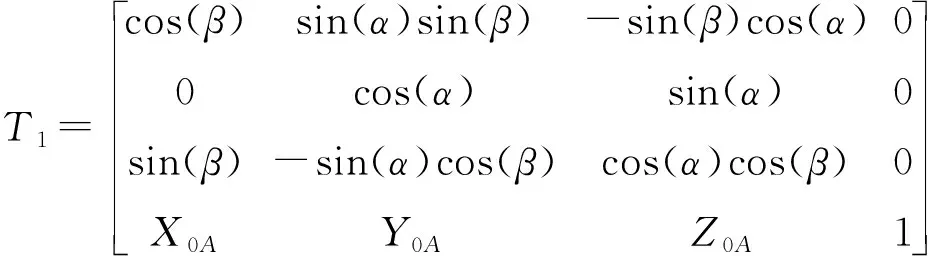
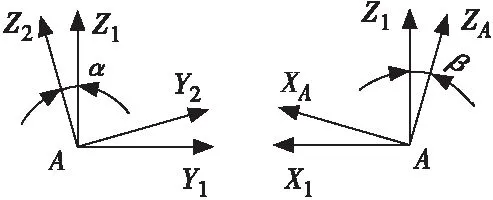
图3 A点主销坐标系及其变换角度
图4为AFC面主销坐标系及其变换角度。坐标系X3Y3Z3原点在A点,由主销坐标系XAYAZA绕ZA轴旋转γ角得到,轴Y3垂直于平面ACF。坐标系X4Y4Z4由主销坐标系X3Y3Z3绕Y3轴旋转δ角得到, 轴Z3与直线AC重合。则主销坐标系XAYAZA与坐标系X4Y4Z4转换矩阵为[5-8]:
[XAYAZA1]=[X4Y4Z41]T2
(4)
式中:
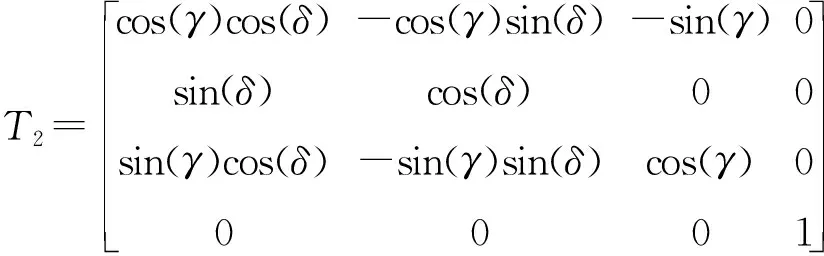
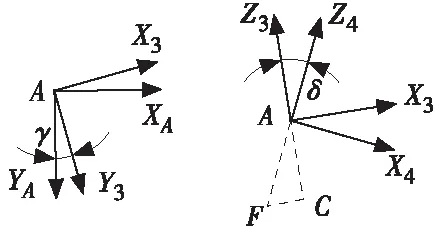
图4 AFC面主销坐标系及其变换角度
将F点在坐标系X4Y4Z4中的坐标、G点在整车坐标系中的坐标均转化为主销坐标系XAYAZA中的坐标:
[XAFθYAFθZAFθ1]=[X4FθY4FθZ4Fθ1]T2
(5)
[XAGθYAGθZAGθ1]=[X0GθY0GθZ0Gθ1]T1-1
(6)
(7)
联立式(5)、式(6)、式(7)可求得γθ值。则任意时刻F点整车坐标为:
[X0FθY0FθZ0Fθ1]=[X4F0Y4F0Z4F01]T2T1
(8)
2.2.3B点整车坐标
坐标系X5Y5Z5原点在A点,由主销坐标系XAYAZA绕ZA轴旋转ρ角度得到,使X5轴垂直于平面ABC。则坐标系X5Y5Z5与主销坐标系XAYAZA之间转换关系为:
式中:
(9)
B点在坐标系X5Y5Z5中任意时刻的坐标为:
X5Bθ=0
Y5Bθ=LABθ·sin(ζθ)
(10)
Z5Bθ=-LABθ·cos(ζθ)
F点在坐标系X5Y5Z5中任意时刻的坐标为:
(11)
又有:
(12)
联立式(10)、式(11)、式(12)可求得ρθ值。则任意时刻B点的整车坐标为:
(13)
2.2.4H、K、L点整车坐标

图5 转向节坐标系及其变换角度
图5为转向节坐标系及其变换角度。坐标系X6Y6Z6原点在C点,平行于整车坐标系X0Y0Z0,C点整车坐标为(X0Cθ,Y0Cθ,Z0Cθ)。坐标系X7Y7Z7由坐标系X6Y6Z6绕Z5轴旋转φ角得到,φ角为直线CF在水平面的投影与X5轴的夹角。坐标系X8Y8Z8由坐标系X7Y7Z7绕Y7轴旋转ξ角得到,ξ角为直线CF与平面X5Y5之间的夹角。此时坐标轴X7与直线CF相重合。转向节坐标系XCYCZC由坐标系X8Y8Z8绕X8轴旋转ψ角得到,使YC轴垂直于平面BCF。假设车轮为刚体且无绕车轮中心线的旋转运动,则B、C、H、K、L5点为转向节刚体上的固定点。悬架运动过程中,该点相对于转向节坐标系XCYCZC坐标值固定不变。由上述坐标系变换分析得:
(14)
(15)
其中:
(16)
(17)
将B点整车坐标带入式(14),联立式(15),且由于YC轴垂直于平面BCF,则任意时刻YCBθ=0,可联立求得ψ:
(18)
(19)
已知H、K、L点初始整车坐标,则任意时刻H、K、L点在转向节坐标系XCYCZC上的坐标为:

将任意时刻H、K、L点在转向节坐标系XCYCZC上的坐标带入式(18)可得H、K、L点整车坐标为:

则车轮外倾角μ为:
μθ=arctan[(Z0Kθ-Z0Hθ)/(Y0Kθ-Y0Hθ)]
(20)
车轮前束角ν为:
νθ=arctan[(X0Kθ-X0Hθ)/(Y0Kθ-Y0Hθ)]
(21)
轮距Lθ:
Lθ=-2·Y0Lθ
(22)
轮心跳动Hθ:
Hθ=Z0Hθ-Z0H0
(23)
2.3 平行轮跳计算分析
悬架的K特性参数主要包括静态前束角、静态外倾角、主销后倾角、主销内倾角、前束变化、悬架偏频等。通常通过双轮平行跳动来模拟汽车加减速、过减速带等障碍物及路面不平引起的颠簸运动对悬架K特性参数的影响。本文即通过双轮平行跳动仿真来分析主销内倾角、主销后倾角、车轮外倾角、车轮前束角、车轮轮距随车轮跳动的变化[9-10]。
通过上述2.2计算公式,设置θ角范围为(-15°~15°),间隔为0.1°,利用EXCEL对悬架系统进行300个位置点坐标转换计算,得出悬架平行轮跳试验结果。具体结果如图6和图7中的“计算值”所示。

图6 车轮定位角对比

图7 车轮轮距对比
2.4 对比分析验证
通过ADAMS/Car建立横置板簧式前悬架运动模型,如图8所示(横置板簧式弹簧力利用螺旋弹簧模拟)。对前悬架进行平行轮跳试验[11-12],具体结果如图6和图7中的“试验值”所示。
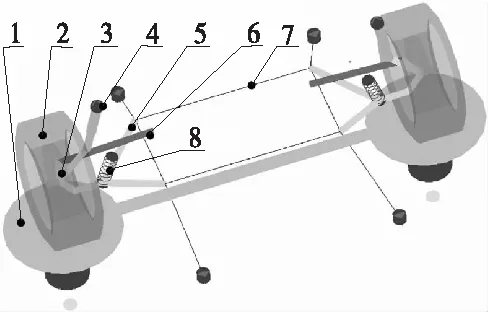
1—试验台; 2—车轮; 3—转向节; 4—减振器; 5—下摆臂;6—转向拉杆; 7—副车架; 8—螺旋弹簧。图8 横置板簧独立悬架ADAMS模型
由图6和图7的结果对比可知,计算所得的前悬架K特性与ADAMS/Car仿真所得结果基本一致(差别小于0.5%)。故可通过坐标转换计算悬架K特性,提前预测悬架K特性,为汽车设计提供参考。
3 结束语
利用EXCEL,通过坐标旋转变换得到的前悬架平行轮跳计算结果与ADAMS/Car仿真结果完全一致,在某些情况下,可利用该方法代替ADAMS/Car仿真,减少CAE分析工作量。悬架运动是多工况、多系统相互作用的综合结果,后续工作需要分析研究各硬点位置的优化及悬架C特性问题。
