基于崩岸监测的多波束系统参数设计
2019-10-23马耀昌刘世振2樊小涛
马耀昌,刘世振2,樊小涛,周 威
(1.长江水利委员会水文局 长江上游水文水资源勘测局,重庆 400020;2.长江水利委员会水文局 河道勘测管理处,武汉 430010)
多波束测深系统是当代水下勘测中一项新技术,它是由多个传感器组成,其应用声速反射、散射和声相干原理形成条带式的测深数据,每个条带包含几百甚至上千个高密度数据点[1]。随着水资源开发和水下工程建设等对水下地形探测精度和覆盖度不断提出更高的要求,使得多波束技术在测深方面的应用也愈来愈广泛。目前,以多波束测深系统为代表的船载高精度声学系统逐步成为精密水下地形测量和大比例尺地形图数据获取的主要技术手段,但普遍缺乏对多波束测深系统在项目应用开展前的详细设计,即根据多波束系统参数指标结合项目精度要求,在项目开展前对探测关键参数进行有效设计,从而有效提高作业效率和探测精度。
本文在多波束测深分辨率模型的基础上,对多波束测深的分辨率进行分析,获得了横向和纵向分辨率的分布规律。推导出了多波束测深系统的发射角、最大有效航行速度、扇面开角及采样率的设计参数,总结了多波束测深系统参数设计流程,计算出了SONIC2024型多波束在堤防监测中参数推荐值。
1 多波束测深系统
多波束测深系统是一项复杂的综合性系统,其测量技术已经突破了传统单波束测深技术的局限,效率得到了大幅度提高,并形成了新的水下地形探测框架,并在系统的构成、波束发射接收方式、水下信号探测技术、射线几何学和数据处理成图等方面形成了鲜明的特点[2]。
多波束测深系统在与航迹垂直的剖面上能够得到成百上千个测点回声数据,随着测船的移动,能够得到一条一定宽度的水深条带[3],通过测船的来回扫测,可以准确迅速地测出一定范围内水下地形的形状和高低变化,从而可靠地得到该区域精细水下地形地貌。全球卫星导航定位系统(Global Navigation Satellite System,GNSS)的定位准确性对波束测深数据的影响很大,高频率的GNSS、厘米级的实时差分(Real Time Kinematic,RTK)技术的定位精度可以满足多波束的定位要求;多波束数据的覆盖程度和重叠度与测区的完整性及探测结果的可靠性密切相关,通过多波束的导航控制软件实时判别测区的覆盖程度和重叠度;测船速度、多波束的发射角、纵向波束角和水深等决定测深数据是否全覆盖;测船速度、最大发射角等探测参数可以通过分析多波束脚印大小以及探测最小裂缝尺寸推导和优化。因崩岸监测关系到堤防的安全性、精确性和时效性,故应在探测之前对影响结果的设置参数进行有效计算。
2 多波束测深系统技术分析
2.1 多波束分辨率
多波束测深系统的中央波束与单波束测深系统相同,是垂直发射的。设其波束角为α,波束随着水深增加而逐渐变大。t0为中央波束声波返回的时间,t为多波束最远边缘声波返回的时间,如图1所示。

图1 中央波束发射示意图
多波束的水平分辨率可以通过式(1)—式(3)进行推导。
R=Ct/2 ,
(1)
H=Ct0/2 ,
(2)
(3)
式中:R为多波束倾斜坡束的发射端到反射水底脚印的斜距;r为中央波束脚印分辨率的1/2;C为声速,可以通过声速仪器测定;H为多波束正下方的水深,可以通过多波束测深系统的中央波束获得。
换能器垂直安装的多波束,除了中央波束外的波束都是倾斜入射的[4],图2表示了多波束在x,y,z方向的单元波束大小。

图2 多波束空间分辨率
根据需要,设定测船坐标系,设x轴为测船艏向,y轴为测船右舷,z轴垂直于水底[5]。θ为倾斜入射波束的发射角,α为水平入射波束的角度,β为纵向入射波束的角度。x,y,z3个方向的单元波束大小分别为
(4)
式(4)即为多波束倾斜入射单元波束的大小,即波束角的空间分辨率[6-7]。
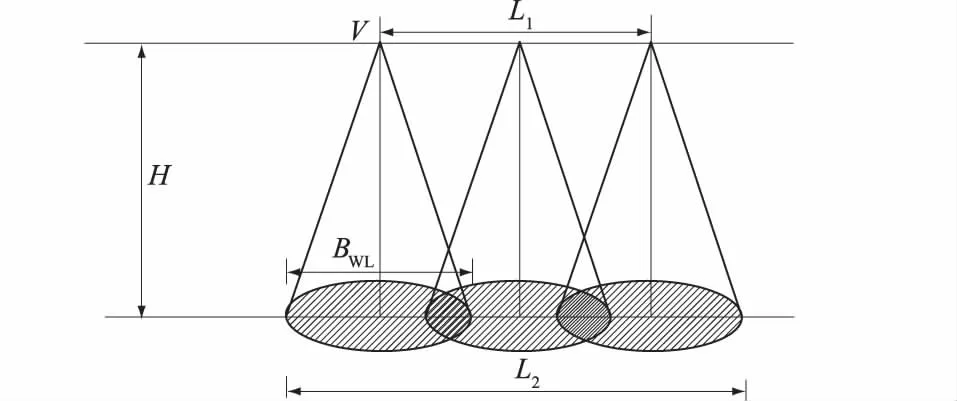
图3 多波束测深纵向覆盖示意图
2.2 多波束参数设计研究
测船速度的快慢也与单元波束的纵向大小有关,根据海道测量规范(IHO S-44,2008,IHO海道测量规范S-44)[8],多波束探测纵向最小精度为图3中的L1。
L1=4VLpN/C。
(5)
式中:L1为一个脉冲单元时间内测船的行进的距离;V为测船速度;N为多波束崩岸探测的采样数;Lp为脉冲长度;探测设计最小地形精度的指标需>L1,则多波束测深系统纵向的探测精度为
εy=4VLpN/(CX)+BWL=
4VLpN/C+H(βπ/180)/2 。
(6)
式中BWL为纵向波束脚印宽度。
一般情况下N≥3。发射脉冲长度LP受多波束系统自身特性影响,也与水的深度有一定的相关性。发射脉冲长度与水深及覆盖宽度的关系为
(7)
故可得到最大采样率Pt计算公式为
(8)
式中B为扇面宽度。
在测船行进工作时,多波束测深系统在x,y,z方向探测精度为

图4 横向分辨率与水深及发射角的关系
由此可知,波束脚印的横向宽度即为多波束横向分辨率,其主要与水平波束角、发射角及水深有关,与航速无关,图4给出了SONIC2024多波束测深系统不同深度情况下横向分辨率与水深及波束发射角的关系。多波束纵向分辨率与扇面宽度、测船速度、声速、采样率、水深及纵向波束角等有关。多波束发射开角越大,其探测的宽度也就越大,探测分辨率越低。垂向分辨率与中央波束角及水深有关。SONIC2024多波束测深系统不同深度和航速情况下的多波束测深纵向分辨率分布如图5所示。
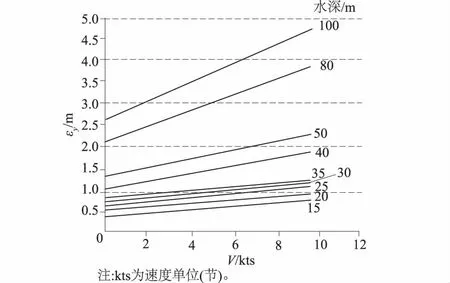
图5 纵向分辨率示意图
3 测船速度设计
在多波束测深系统工作中,设tR为相邻两脉冲发射的时间间隔,这就要求tR必须大于最边缘波束发射返回的时间[9],比如单探头SONIC2024全扇面开角为160°,单侧扇面开角为80°时,则最远距离波束的回波时间为
tR=(2H)/(Ccosθmax) 。
(10)
由于纵向波束脚印宽度为
SL=HθL,
(11)
对于崩岸裂缝精密探测,必须保证两脉冲之间的有效链接[9],故多波束测深时测船的最大有效航行速度为
(12)
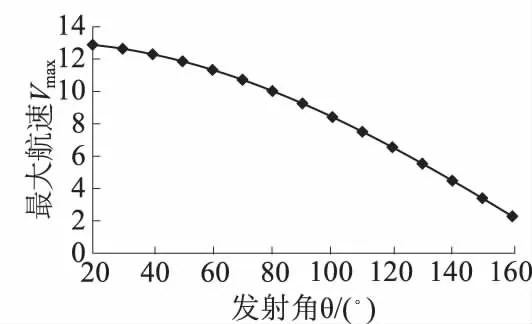
图6 不同扇面开角下最大允许航速
以SONIC2024多波束系统为例,其开角为160°,即θmax= 80°,纵向波束角为1°,则可得到SONIC2024的发射角与最大有效航行速度的关系如图6所示。
最大有效航行速度关系式(12)是从能接收到的最边缘波束提出来的,最大有效航行速度还应该参考纵向探测精度εy。
4 崩岸探测参数设计流程
在实际工作时,应提前知悉多波束水平发射波束角为(a0)和纵向发射波束角为(β0)。根据设计崩岸裂缝监测的最小尺寸以及水深,设置测船速度v及脉冲长度来进行识别,其参数设计可以遵循以下4个流程:
(l) 最大扇面宽度可根据水深和最大发射角θL计算确定;
(2) 最大发射角θL可利用式(9)中的水深H和横向分辨率来计算确定;
(3) 最大采样率根据声速、水深及扇面宽度结合式(8)计算确定;
(4) 最大有效航行速度可根据式(12)中能接收到最边缘波束的最大有效航行速度vmax公式计算确定。
以上多波束参数可编制程序运算得到。根据测前的崩岸探测精度指标和多波束系统参数,可以获得相关设置参数的推荐数值。表1列出SONIC2024多波束测深系统在不同条件下推荐探测参数。
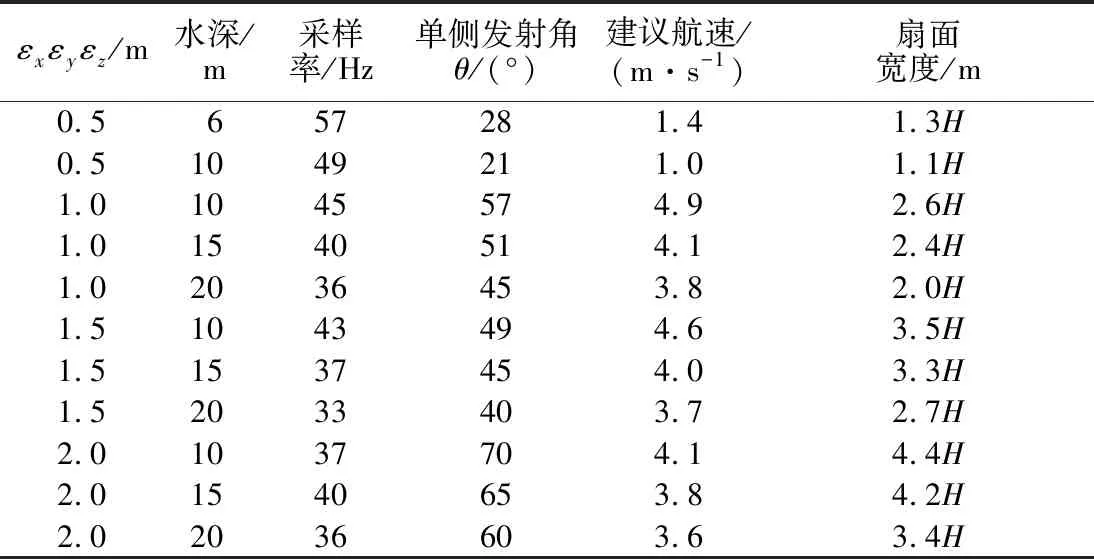
表1 SONIC 2024探测参数设计
5 结 论
本文根据多波束测深仪声学设计原理,推导的公式可作为多波束扫测前对关键参数进行技术设计的依据。通过研究多波束测深系统的分辨率来推导探测精度与波束发射角、测船航行速度、水深的具体关系,在此基础上,对多波束测深全覆盖测量的分辨率进行了分析,分别给出了不同深度的横向分辨率分布和不同航速的纵向分辨率分布,对多波束测深系统不同发射角下的测船的航速进行了研究。结果表明:
(1)探测精度要求越高,在减小发射角的同时应降低船速;水深越大,相同发射角下扇面宽度越宽,探测精度越低;有效扇面宽度主要与横向分辨率有关;SONIC2024测深系统纵向分辨率优于横向分辨率。通过以上研究,归纳出多波束探测参数的设计流程,在实际工作中,可以编制程序,通过测前的崩岸探测精度指标和多波束系统参数进行提前设计。
(2)在多波束测深系统进行全覆盖、高精度崩岸地形扫测时,波束角的大小直接反映了所探测地形的效果。在波束角相同的情况下,波束脚印大小与水深成正比关系,当水深越深,波束脚印越大。当水深一定时,波束角越小,波束脚印就越小,所探测的地形精度就越高,也就越接近真实地形。但在实际工作中却并不是波束角越小越好,因为波束角越小而换能器的尺寸就越大,探测的设备也越昂贵,探测的成本也越高。
(3)为了准确得出堤防的精细地形,满足崩岸监测的要求,必须要保证多波束测深精度,除在项目开展前对参数进行详细分析计算外,同时应对对多波束安装、参数校准、多波束测量基准的建立、测线布设及影响测深精度的要素进行提前规划和详细观测,这是获得高精度水下地形的前提条件。