基于CFAR算法的极化SAR图像飞机目标检测
2019-10-22
(沈阳航空航天大学 辽宁 沈阳 110000)
引言
目前为止,在致力于发展高速、高精度以及良好可操作性的极化 SAR 图像的飞机目标检测算法检测方面,研究者们做了大量的工作,涌现出很多的SAR目标检测算法。如在利用图像强度特征方面,比较著名的如:Novak提出的局部双参数cFAR检测方法,该方法简单有效,被广泛应用,但该方法缺点也非常明显。恒虚警检测算法(CFAR)是当前主要的飞机目标检测方法[1,2],本文针对大场景复杂背景下对检测精度和时间的要求,研究了基于目标先验知识的二次 CFAR 的检测算法。
一、cfar算法原理与算法模型
根据的计算方式的不同,CFAR检测器分为均值(ML)类和有序统计量(OS)类两种典型的检测器,本文主要使用ML类CFAR。
ML类CFAR:

(2-1)
(2-2)
(2-3)
式中,xi为为各单元的参考信号幅度;L位前沿和后沿参考滑窗长度。
各种雷达系统中用得最多的CFAR检测方法就是CA检测算法。CA在均匀杂波背景中的检测性能最好,但在非均匀背景中性能严重下降.
二、基于改进的 CFAR的SAR图像检测
在本文中,为了既满足检测精度又满足检测时间,考虑将全局 CFAR 和滑窗 CFAR 相结合,将这种方法称为二次 CFAR 检测算法.其主要流程为:
1.对每块图像,设定一个较高的虚警率进行阈值计算,并进行二值化。在这个步骤中,要保证每个目标都能够尽可能的被检测出来,因此设定的虚警率较高。在每个图像块中,使用同一个阈值进行二值化。
2.对整幅图像进行聚类。
3.统计每个连通区域的位置信息。在这步中,对每个连通的区域,统计其在在图像上的最大外接矩形,由于在步骤 1)中使用的虚警率较高,因此这个边界比实际的目标的边界要大。
4.对每个目标,根据目标的边界信息,设定滑窗的尺寸。以每个区域的最大外接矩形作为保护区窗口的大小。在保护区外,设定一定大小的杂波统计区(距保护区为 5 个像素)。
5.对每个区域进行二值化。对每个目标区域,根据杂波模型和虚警率计算阈值 T,并进行二值化。
三、实验结果分析
本实验采用 UAVSAR 系统在美国 Gulf Coast 地区上空采集的新奥尔良市某机场场景数据。
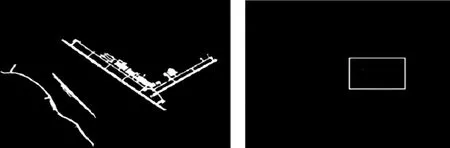
(a)跑道区域检测结果 (b)飞机目标检测结果
图1 中,图(a)为算法得到的跑道区域二值标签图,图(b)为本小节算法得到的飞机目标检测结果。5 架飞机(黄色圆圈)均被检测出,且只存在 2 个虚警(蓝色圆圈)。实验结果验证了本小节算法的有效性。
四、结论
此算法均能准确有效地检测出真实跑道,无虚警区域,且检测出的跑道结构完整、细节信息都保持良好;能快速准确地检测出跑道区域,实时性更好;同样本节算法采用无监督分类方法提取疑似跑道区域,没有用到样本信息,说明本节算法实用性更广。