基于数字相位恢复算法的正交相移键控自由空间相干光通信系统
2019-10-22管海军刘云清张凤晶
管海军,刘云清,张凤晶
(1.长春理工大学 电子信息工程学院,吉林 长春 130022;2.中国科学院长春光学精密机械与物理研究所,吉林 长春130033;3.空军航空大学 航空作战勤务学院, 吉林 长春130022)
1 引 言
近年来,激光技术得到了较大的发展和广泛的应用[1-4]。其中,自由空间激光通信技术由于具有速率高、安全性好等优点,逐渐成为了研究热点[5-8]。与传统的直接探测型自由空间光通信系统相比,自由空间相干光通信系统的系统结构虽然稍微复杂,但其仍然具有以下其他系统所无法比拟的优势:首先,其具有较高的探测灵敏度;其次,其光电转化过程是线性的。由于光信号的幅度与相位信息都能被转化到电域,因此自由空间相干光通信系统可以兼容诸如M级相移键控(MPSK)、正交幅度调制(QAM)等高阶调制格式。然而由于大气湍流所引起的信号相位扰动(噪声)的影响,其通信链路的性能会大大降低[9-12]。在自由空间相干光通信系统中,相位噪声主要是由光信号经过大气湍流时所产生的波前畸变、激光器所固有的线宽以及频偏和相偏、接收端产生加性噪声,这3方面因素而引入的。因此,如何抑制相位噪声同步载波相位是系统设计的关键所在。
随着高速数字信号处理技术(DSP)的发展,数字相位恢复算法为自由空间相干光通信系统提供了较为合理的解决方案。在设计相位恢复算法时,需要考虑两个参数:一个是系统的线宽容忍度,另一个是硬件复杂度。前者决定了算法的可靠性,而后者则直接影响了系统的实时性。前馈算法虽然受到了广泛的关注,但其对硬件有着较高的要求[13-14]。在这些前馈算法中当属维特比—维特比相位估计(VVPE)算法最为经典[15]。VVPE算法的计算步骤简单、易于实现,但其同时存在精确度较低的情况。
为了解决以上问题,本文首先提出了一种基于数字相位恢复算法的正交相移键控自由空间相干光通信方案。该方案利用二阶联合相位恢复算法有效地克服了大气所引入的信号相位抖动。其中第一阶算法用来进行粗校正,而第二阶算法则用来进行精校正。
2 系统结构与相干接收原理
2.1 系统结构
本系统结构如图1所示。系统在发射端使用了一个马赫-曾德尔调制器(MZM)来调制激光光束。调制器的同向(I路)和正交(Q路)支路被用来发送两个伪随机序列。调制后的光信号经掺铒光纤放大器(EDFA)放大后被送入发射天线。
在相干接收端,首先将受到大气链路影响的接收光信号送入EDFA中进行放大,然后将其送入零差同向—正交(IQ)接收机中进行信号探测。在这一过程中,假设偏振控制器可以保证本振激光器(LO)发出的本振光的偏振态(SOP)与接收到的光信号的偏振态保持一致。接收到的信号光与本振光在 2×4个90°光混频器中进行混频,其输出的光信号被两个平衡探测器(BD)转化为电信号。平衡探测器所输出的电域I路和Q路信号被送入高速DSP芯片进行数字相位恢复。
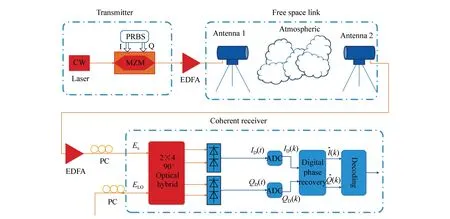
图1 系统结构模型 Fig.1 System structure model
2.2 相干接收原理
如上文所述,相干探测的第一步就是将信号光与本振光进行混频。为了全面地评估大气湍流所带来的影响,需要同时考虑服从对数正态分布的幅度扰动(闪烁)以及服从高斯分布的相位扰动(畸变)。因此,在接收端接收信号与本振光信号可以分别被表示为:
Er(r,t)=Esexp[(χ(r)+jφ(r)]·
exp[j(ωst+θs(t)+θns(t))] ,
ELO(t)=E1exp[j(ω1(t)+θn1(t))] ,
(1)


(2)
认为相位φ(r)服从均值为零的高斯分布。在Kolmogorov湍流谱条件下,由大气湍流所引起的相位畸变可以通过Zernike多项式模式补偿法进行补偿[17]。由文献[17]可知,相位畸变信号在经过J阶Zernike多项式补偿后,其残余相位方差可以表示为

(3)

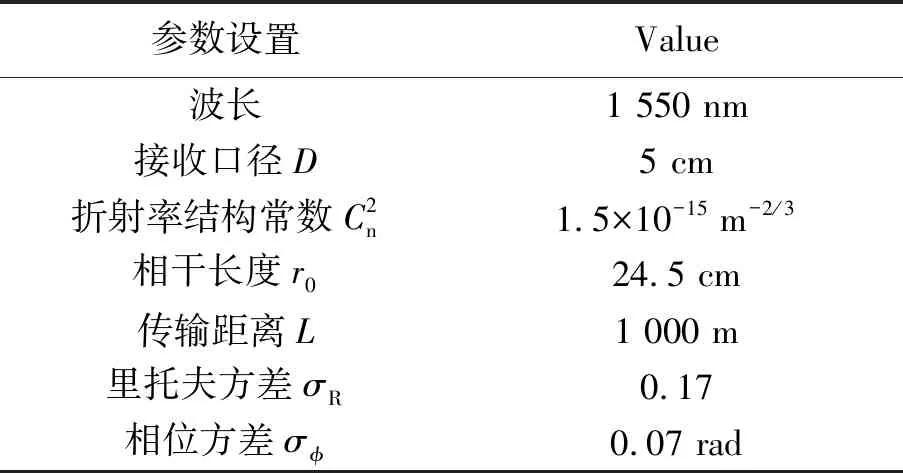
假设系数CJ=1.029 9,表示接收端未采取任何模式补偿[21]。本文假设接收孔径远远小于大气相干长度,即D< Er(t)=Esexp(χ(t)+jφ(t)) exp[j(ωs-ωl)t+θs(t)+θns(t))] , (4) 对于零差相干接收机(ωs=ωl)来讲,接收信号与本振光在2×4个90°光混频器中完成混频,这一过程可以表示为: (5) E1和E3表示由平衡探测器所转化出的同相电信号,E2和E4表示由平衡探测器所转化出的正交电信号,它们可以分别表示为 ID(t)=RE1Es(t)cos[θs(t)+θn(t)]+nI(t) QD(t)=RE1Es(t)sin[θs(t)+θn(t)]+nQ(t) , (6) 其中,R表示平衡探测器的响应度,Es(t)为经过大气湍流影响的接收信号强度。θn(t)表示载波与本振光之间的总相位噪声,其包括了激光器线宽和大气湍流引起的相位噪声。系统中的散粒噪声和热噪声可以视为加性高斯白噪声(AWGN)。式中nI(t)和nQ(t)表示加性噪声,其包含了接收端热噪声、放大器自发辐射(ASE)噪声和散粒噪声。经模数转换后可得到复信号: E(k)=ID(k)+jQD(k) . (7) 此后,采样信号ID(t)和QD(t)被送入DSP中进行相位噪声估计。在估计出相位噪声后,系统会将噪声从信号中减去并实现相位恢复。其具体过程将在下一节中给出。 在本节中,主要应用M次方的相位恢复算法进行相位恢复。算法结构如图2所示。 图2 一阶M次方的相位恢复算法结构 Fig.2 Structure of the single-stage M-th power phase recovery algorithm 对于QPSK来说,M=4。在运算过程中接收信号的调制数据信息θs(t)(=0,π/2,π,-π/2)会被4次方算法(·)4去掉,这是由于无论θs(t)的值为多少,4θs(t)=4πm(m为整数)。因而E4(k)∝exp[j4θn],可以通过1/4·arg(·)的运算获取完整相位噪声θn(t)的信息。光载波相位θs(t)的变化速度远远低于试验中所用到的符号速率(10G symbol/s)。因此,可以通过在多个符号区间对载波相位求平均来求取较为精确的载波相位。系统首先将N个相邻符号的复振幅E4(k)进行累加并求平均,然后将得到的结果除以4,以求出相位噪声θe∈(-π/4,π/4)。这一过程可以表示为: (8) 随后系统利用估计出的相位噪声对采样信号ID(t)和QD(t)进行相位恢复,以获得质量较好的信号。这一过程可以表示为 (9) 为了进一步提高相位恢复精度,本小节设计了二阶联合相位恢复算法。该算法结构如图3所示,即首先将接收信号送入一阶M次方的相位恢复算法进行粗校正,然后将得到的信号送入第二阶盲相位搜索算法进行精校正。 正如图3所示,第二阶盲相位搜索算法采用纯前馈结构,其主要步骤是首先利用多个噪声测试相位对同一个接收到的信号进行校正,然后求校正后的结果与各标准星座点之间的欧氏距离并取距离最小的结果作为输出。这一算法的具体过程如下: 首先选取B个噪声测试相位φb对接收到的信号rk进行相位校正。这里φb可以表示为: (10) 式中,b为大小在-B/2到B/2间的一个整数。由前文可知,B的取值越大,该算法的校正精度越高,但同时系统的复杂度也随之增加。对于本文的系统,假设B=8。 图3 二阶联合相位恢复算法结构 Fig.3 Structure of the two-stage joint phase recovery algorithm 本文使用MATLAB以及专业仿真软件VPI transmission maker对前文所提出的系统进行仿真验证。这里假设数据速率为20 Gbps(10G symbol/s)、发射与接收平均功率分别为10 dBm和-20 dBm、第一阶相位恢复算法的平滑长度N=10。仿真参数如表1所示。 图4(a)是当激光器联合线宽为100 kHz时接收端所收到的、未经校正的星座图。图4(b)和图4(c)分别为经过单阶和双阶校正后的星座图。 表1 仿真参数 图5则是当激光器联合线宽为100 kHz、接收端本振光与发射端载波间频偏为20 MHz时,未经校正、单阶和双阶校正星座图。由这两组图片可知,无论是单阶相位校正系统还是双阶相位校正系统都能对激光器所产生的联合线宽噪声以及频偏噪声起到较好的抑制作用。可见,相比于单阶校正系统,双阶校正系统对信号的改善作用更为明显。 图4 激光器线宽为100kHz时的星座图.(a)相位校正前,(b)单阶相位校正,(c)双阶联合相位校正后 Fig.4 Normalized constellation diagram of QPSK signal with laser linewidth of 100 kHz for the transmitter and the local oscillator. (a)Before using carrier phase recovery algorithm, (b)after using single-stage carrier phase recovery algorithm, and (c)after using two-stage joint carrier phase recovery algorithm 图5 激光器线宽为100 kHz,频偏为20 MHz时的星座图. (a)相位校正前, (b)单阶相位校正后, (c)双阶联合相位校正后 Fig.5 Normalized constellation diagram of QPSK signal with laser linewidth of 100 kHz and frequency offset of 20 MHz for the transmitter and the local oscillator. (a)Before using carrier phase recovery algorithm, (b)after using single-stage carrier phase recovery algorithm, and (c)after using two-stage joint carrier phase recovery algorithm 图6 双阶校正、单阶校正和无校正系统误符号率和激光器线宽的关系 Fig.6 SER versus linewidth for the two-stage, single-stage and without carrier phase recovery algorithm 图6为不同线宽条件下、不同系统的误符号率(SER)。由图6可知,对于未进行相位校正的系统,即使在线宽只有20 kHz的条件下,其误符号率性能仍会因大气湍流的影响而急剧恶化。相比之下,当系统误符号率为10-8时,双阶相位校正的线宽容忍度可达10 MHz。此外,还可以看到,在线宽相同时双阶联合校正系统的误符号率要比单阶校正系统低3个数量级。 图7为不同湍流条件下系统误符号率和激光器线宽的关系,其中σφ=0.07,σφ=0.1,σφ=0.13均为弱湍流条件。由图7可知,系统的误符号率会随着湍流的增强而升高。此外,正如图6所示结果,图7也显示了在联合线宽以及大气湍流条件相同时,双阶相位校正系统的误符号率要比单阶相位校正系统低3个数量级。这再一次说明了双阶相位校正算法的有效性。 图7 不同湍流条件下双阶校正和单阶校正系统误符号率和激光器线宽的关系 Fig.7 SER versus linewidth which is measured with the two-stage and single-stage carrier phase recovery algorithm for σφ=0.07, σφ=0.1, σφ=0.13 本文提出了基于数字相位恢复算法的正交相移键控(QPSK)自由空间相干光通信系统。仿真结果表明该系统采用的二阶联合相位恢复算法可以极大地抑制由弱湍流所引起的信号退化以及由系统本身引入的相位噪声。此外,仿真结果还表明二阶联合相位恢复算法性能远好于一阶M次方相位恢复算法。本系统在速率为20 Gbps、误符号率为10-8时的线宽容忍度可达10 MHz。因此,该系统的提出对于自由空间光通信性能的提升有着较大意义。

3 相位恢复算法
3.1 一阶相位恢复算法



3.2 二阶联合相位恢复算法



4 实验仿真结果




5 结 论
