基于模糊控制汽车自动泊车关键技术设计
2019-10-21张刚
张刚

摘 要: 研究了汽车自动泊车系统,完成了模糊控制自动垂直泊车系统的设计。在分析了自动泊车系统组成的基础上,从垂直泊车的实际情况出发,完成了基于FPGA的模糊控制自动泊车系统总体结构的构建。泊车系统采用FPGA作为核心处理器,控制算法采用模糊PID算法,對周围环境数据的采集通过超声波传感器的使用完成,再通过PID模糊控制器完成信息的分析处理过程。仿真测试结果表明模型车航向角范围在-34°~34°之间,该系统完成了自主无碰撞泊车过程,具有较高的参考价值。
关键词: 汽车自动泊车系统; FPGA; 模糊控制; 实现路径
中图分类号: TM93
文献标志码: A
文章编号:1007-757X(2019)06-0119-03
Abstract: This paper mainly studies the automatic parking system, completes the design of an automatic vertical parking system based on fuzzy control. Based on the analysis of the composition of the automatic parking system and the actual situation of the vertical parking system, this paper completes the construction of the overall structure of the fuzzy control automatic parking system based on FPGA. Using the FPGA as the core processor, the control adopts the fuzzy PID algorithm. The data acquisition of the surrounding environment is completed by using the ultrasonic sensor, and then the analysis and processing of the information are completed by the PID fuzzy controller. The simulation test results show when the heading angle is between -34° to 34°, the system can completed its autonomy saftly. Parking non-collision process has been designed, and has high reference value.
Key words: Vehicle automatic parking system; FPGA; Fuzzy control; Realization path
0 引言
汽车为人们生活带来了极大的便利,随着汽车技术的发展及人们生活品质的提升,汽车逐渐成为人们出行时必不可少的交通工具,但同时汽车在生活中的普及使用,其所引发的安全问题不容忽视,其中倒车引起的事故逐渐增多,传统自动泊车系统需驾驶员进行操作,对泊车过程中车辆状态的检测主要通过车身上传感器和图像传感器完成,虽然降低了驾驶员的倒车压力,但泊车的安全程度及智能化水平还有待提高,对汽车自动泊车系统进行研究和开发,兼顾泊车过程的安全性和效率是目前研究智能化汽车的方向之一。
1 现状概述
垂直泊车位对空间的利用率较高(行车道同泊车空间成90°角),目前停车车位大多属于垂直泊车位,能够满足更多的停车需求,自动泊车系统主要由感知、决策、执行3个子系统构成,泊车过程通过各子系统协同配合完成:感知系统通过多种传感器的使用实现对车辆状态及周边环境的探测,上传采集到的信息至决策系统,完成环境信息的分析(通过使用控制芯片),结合相应算法实现障碍物规避及车位检测等,在此基础上完成适当控制量的生成,执行系统根据这些控制量实现对电机和航机的控制,完成对汽车各部分的协调过程,按照决策路径控制车辆运动,从而完成垂直泊车过程[1]。
本文所设计的基于模糊控制下汽车自动泊车系统的优势主要表现在:(1)节约开发时间,通过精度较高的模糊PID算法的使用,省去了单独研究受控对象的数学模型环节,在使开发的工作量得以显著降低的同时,控制系统的相应功能及控制精度得以提高;(2)节约成本,FPGA较强的数据处理能力的充分发挥,提高了系统的运算速度以及安全性和可靠性。
2 自动垂直泊车系统设计
2.1 系统构成
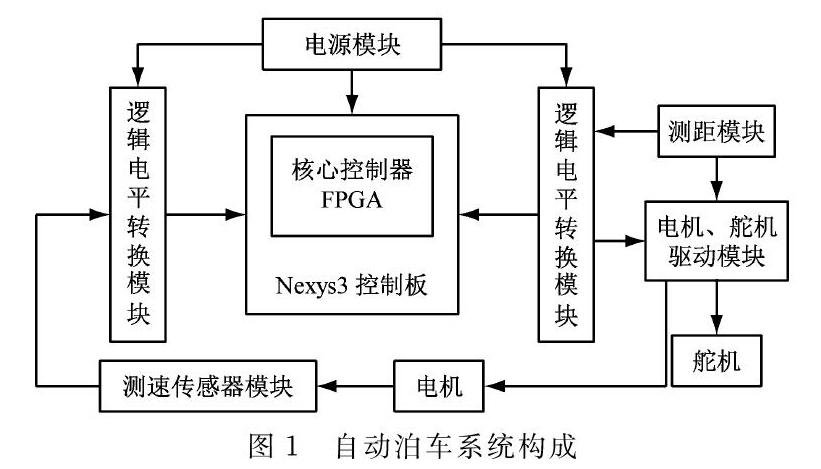
通过垂直自动泊车系统后可提高车辆对自身状态及周边环境的检测精度,当前情景通过系统控制器完成自主判断,采用HC-SR04超声波传感器,FPGA选取高性价比的EP2C5Q208C8N作为控制芯片,系统硬件构成如图1所示。
系统工作流程为:车速及车身障碍物信息由超声波测距传感器进行实时监测,接收到的测量数据通过逻辑电平转换模块传输至Nexys3控制板,由FPGA完成接收数据的分析处理过程,据此对车辆能否顺利进入车位进行判断,同时将PID模糊算法输出的控制量经逻辑电平转换后发送至电机、舵机驱动模块,从而实现调节车辆转角和车速,完成泊车过程[2]。
2.2 环境参数及约束条件的确定
(1) 环境参数
本文以轿车车型为对象完成自动泊车系统的设计,以外界环境信息为依据进行自决策行为,泊车环境以城市汽车库设计规范要求的参数为参考,行车道宽度为5 500 mm(由WR表示),针对小型汽车设计的车位长度为5 300 mm(由Lp表示),宽为2 400 mm(由Wp表示)。
(2) 泊车起始区域的确定
简化车体为矩形刚体,车体四周分别由A、B、C、D表示,车轮由E、F、G、H表示,后轮轴线和左右两端交点分别由I和J表示,后轴中心点由S表示,阿克曼转向几何转向圆心由O表示。车辆位置由S的坐标(xS,yS)表示,矩形区KLMN作为可行泊车区域,以L点作为坐标轴原点建立坐标系,车体以O点为圆心做圆周运动,泊车过程中对前后移动调整情况不予考虑(向后倒车的速度恒定),在D点画出车体轨迹中的最大圆弧,在J点画出车体轨迹中的最小圆弧,倒车过程中若选择的初始位置不恰当导致车体轨迹最大圆弧易撞到不定点(由C1表示,位于车位左侧KL线上)或车最小圆弧撞到N(C2)点,使倒车失败。车辆位于初始泊车的极限坐标处的位置坐标为(xSmin,ySmin),D、J点刚好经过N、C1点进入泊车空间,车辆D点在初始位置x小于xSmin时会同C1点相撞,车辆J点在初始位置y小于ySmin时会同C2点相撞,泊车极限区域具体如图2所示[3]。
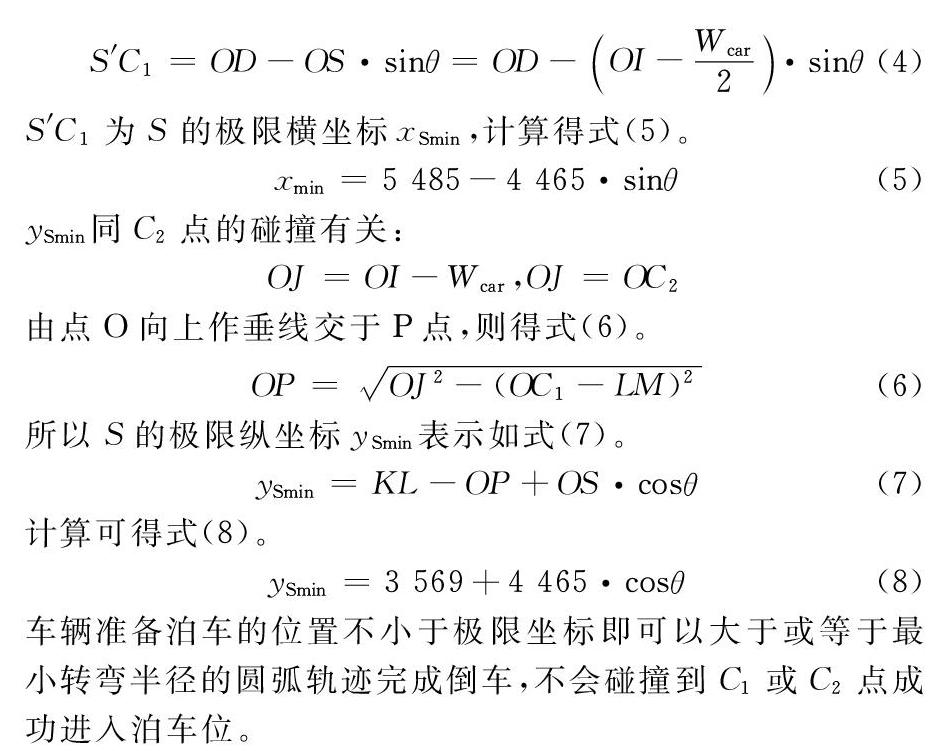
在实际泊车过程中,后轴中心点在初始车体为任意方向角时的泊车极限坐标(xSmin,ySmin)的推导过程如式(1)~式(3)。
由SS′垂直于OC1,且OD=OC1,车体宽度(1 855 mm)由Wcar表示,车辆后悬(1 005 mm)由Lrs表示,车辆最小转弯半径(5 950 mm)由Rmin表示,车辆后轮距(1 554 mm)由Lrw表示,则得式(4)。
车辆准备泊车的位置不小于极限坐标即可以大于或等于最小转弯半径的圆弧轨迹完成倒车,不会碰撞到C1或C2点成功进入泊车位。
2.3 系统软件设计
在自动泊车系统中选择垂直泊车方式,车辆后轮轴中心坐标通过超声波测距获取,同时获取到前轮转角φ、车身航向角θ,经过模糊控制器计算处理后完成相关参数的输出,实现对车辆倒车运行状态的控制过程,顺利完成自动泊车,具体流程如图3所示[3]。
3 PID模糊控制器设计
3.1 PID模糊控制
以设定的输入和反馈信号为依据进行计算,完成车辆实际同理论位置的偏差,在此基础上完成模糊化及去模糊处理过程,最后经PID控制器输出参数(由KP,KI,KD表示),优化处理参数后实现较为理想的控制效果,PID模糊控制器结构具体如图4所示[4]。
3.2 模糊控制器参数设计
表示车辆的位置及姿态的函数同舵机转角和速度有关,泊车模糊控制器中通常以恒定的速度向后倒车,并且大多只控制舵机的转向,一旦发生意外难以对车辆转向做出应急调整,影响了车辆的安全性,为使建立的模糊控制器能对意外情况进行有效应对,本文设计的模糊控制器为两输入两输出,实现对行车方向和转向进行同时控制,使车辆能够进行前后调整以确保顺利完成倒车过程,模糊控制器输入为车体位置(x,y)由后轮中心线坐标表示,θ表示车身方向角,输出为舵机转角(φ)和车速,模糊控制器的推理类型选用Mamdani,模糊控制器参数通过MATLAB模糊工具箱的使用完成设计过程。
(1) 语言变量
坐标原点选为泊车空间左下角,设定车体位置坐标的x和y的取值在[0,10 000]范围内(依据实际泊车位面积及行车道宽度),将车辆位置同坐标原点的不同距离划分为四个等级,用语言变量命名为S,M,B,PB(分别表示小、中、大、很大),完成对车体位置和泊车空间距离情况的描述;假设逆时针转角为正,车身方向角取值在[-20°,120°]范围间,划分为五个等级,方向角为0°时车体平行于x 轴(行车道),语言变量命名为N,Z,PS,PM,PB(分别对应负、零、小正、中正、大正);舵机转角(φ,车身输出变量)在车辆右转时为正取值在[-34°,34°]范围内,与x轴(行车道)方向夹角为 0°,同样划分为5个等级,语言变量命名为NB,NM,Z,PM,PB(分别对应大负、中负、零、中正、大正);设定车速取值在[-2 000,2 000]范围内,包含两个模糊变量即向前移动和向后移动,语言变量命名为NB,PB(分别表示大负、大正),设定所有语言变量的隶属度函数为三角形形状,具体使用GUI工具完成[5]。
(2) 模糊规则
作为模糊推理的核心,模糊规则具体如表1所示(其中/表示无规则,N表示负角,Z表示零度左右,PM表示正向转角,最大正向转角由PB表示,θ同水平方向所呈的较小角度由PS表示),以车身方向角θ及车辆坐标(x,y)作为输入 ,以舵机转角φ(正代表向右转)和车速v(正代表向后行车)作为输出[5]。
4 测试与分析
为了检测本文所设计的基于模糊控制下的自动垂直泊车系统的准确性及实用性,通过测试验证模糊控制器的准确性,本文具体通过MATLAB Simulink的使用完成模糊控制车辆运动学模型(基于超声波测距)的构建及硬件电路设计,在此基础上完成仿真实验,垂直泊车初始位置选取模型车后轮轴中心点坐标,设置其坐标值为(6 000,9 000),模型车的航向角只在每一次的仿真过程中进行改变,通过程序的运行完成了垂直泊车过程行驶轨迹的获取,仿真测试结果具体如图5所示。
系统表现出较高的稳定性,以同等大小模型车2个作为参考车,空车位按实际车库比例预留,在搭建好的模型上测试模型车,结果表明模型车在航向角位于[-34°~34°]范围内皆能够顺利快速的实现自动泊车过程,泊车入库准确度较高,达到了预期效果,具有较高的实际参考价值,测试结果如表2所示。
5 总结
本文主要研究了汽车自动泊车系统,完成了模糊控制自动垂直泊车系统的设计,在分析了自动泊车系统组成的基础上,从垂直泊车的实际情况出发,完成了基于FPGA 的模糊控制自动泊车系统总体结构的构建,泊车系统采用FPGA作为核心处理器,控制算法采用模糊PID算法,对周围环境数据的采集通过超声波传感器的使用完成,再通过PID模糊控制器完成信息的分析处理过程,仿真测试结果表明模型车航向角范圍在[-34°~34°]间,该系统完成了自主无碰撞泊车过程,具有较高的参考价值。
参考文献
[1] 陈天殷.自主泊车系统APS的现状与发展[J].汽车电器,2018(9):27-32.
[2] 江浩斌,吴狄,沈峥楠,等.基于云发生器的自动泊车路径跟踪控制研究[J].机械设计,2016(9):61-65.
[3] 任坤,许艺,丁福文,等.基于机器视觉和模糊控制的自动泊车[J].华中科技大学学报(自然科学版), 2015(S1):88-92.
[4] 侯一民,朱志超.单神经元PID控制算法在智能车控制系统的应用[J].化工自动化及仪表, 2015(2):134-138.
[5] 曾维鹏,蔡莉莎.基于无线通信的智能泊车系统的设计与制作[J].电子世界,2017(21):127-129.
(收稿日期: 2018.12.17)
